Offene Themen von Prof. Schneider: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 54: | Zeile 54: | ||
|| PS, PA, BA, MA | || PS, PA, BA, MA | ||
|- | |- | ||
| 16 || [[Datei:Escape Game.jpg|ohne|150px|]] || [[ | | 16 || [[Datei:Escape Game.jpg|ohne|150px|]] || [[Aufbau und Erprobung eines Educational Escape Game|Aufbau und Erprobung eines Educational Escape Game]] || | ||
*Arduino Programmierung | *Arduino Programmierung | ||
*Holz- oder Metallverarbeitung | *Holz- oder Metallverarbeitung | ||
Aktuelle Version vom 6. Dezember 2025, 08:39 Uhr
Autor: Prof. Schneider
Aktuelle Arbeiten
| # | Thema | Inhalt | geeignet für .. | |
|---|---|---|---|---|
| 21 |  |
AlphaBot: Autonome Spurführung mit ArduCam |
|
PS, PA, BA, MA |
| 20 |  |
Arduino: Self Balancing Bot |
|
PS, PA, BA, MA |
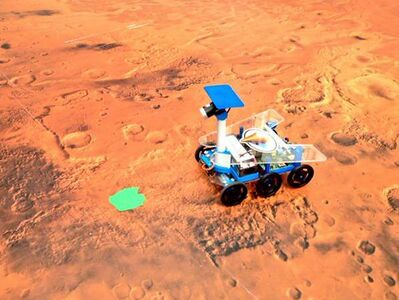
| 19 |  |
Autonomous Driving |
|
PS, PA, BA, MA |
| 18 |  |
Lane Keeping with AI and steering angle |
|
PS, PA, BA, MA |
| 17 |  |
Signalverarbeitung mit MATLAB und Künstlicher Intelligenz |
|
PS, PA, BA, MA |
| 16 |  |
Aufbau und Erprobung eines Educational Escape Game |
|
PS, PA, BA, MA |
| 15 |  |
Inbetriebnahme und Optimierung einer Legoteil Zählmaschine |
|
PS, PA, BA, MA |
| 14 |  |
Aktivierende innovative Lehre aus studentischer Sicht |
|
PS, PA, BA, MA |
| 13 |  |
Aufbau von mechatronischen Laborversuchen |
|
PS, PA |
| 12 |  |
Spurführung mit künstlicher Intelligenz und JetRacer |
|
PS, PA, BA, MA |
| 11 |  |
Navigation eines Autonomen Mobilen Roboters mit ROS2 |
|
PS, PA, BA, MA |
| 10 |  |
Spurerkennung mit Simulink |
|
PS, PA, BA, MA |
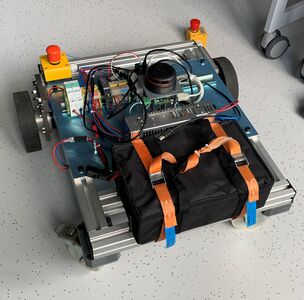
| 9 |  |
Battery Management System |
|
PS, PA, BA, MA |
| 8 |  |
Aufbau und Test eines Autonomen Fahrzeugs |
|
PS, PA, BA, MA |
| 7 |  |
JetBot: ROS AI Kit |
|
PS, PA, BA, MA |
| 6 |  |
JetRacer: ROS AI Kit |
|
PS, PA, BA, MA |
| 5 |  |
Rollenprüfstand für ein Modellfahrzeug |
|
PS, PA, BA, MA |
| 4 |  |
LiDAR-Geschwindigkeitsmessung |
|
PS, PA, BA |
| 2 |  |
Anbindung und Test eines Gyroskops an die Messwerterfassungskarte DS1104 von dSpace |
|
PS, PA, BA, MA |
| Abkürzung | Studentische Arbeit | thesis |
|---|---|---|
| PS | Praxissemester | internship |
| PA | Projektarbeit | projekt thesis |
| BA | Bachelorarbeit | bachelor thesis |
| MA | Masterarbeit | master thesis |
Highlights
-
 Projekt JetRacer
Projekt JetRacer -
 Jetson AI
Jetson AI -
 Arduino-Baukasten für Studierende
Arduino-Baukasten für Studierende -
 Projekt AMR
Projekt AMR -
 Mobile Robotik
Mobile Robotik -
 Time-of-Flight 3D Sensorik
Time-of-Flight 3D Sensorik -
 Autonomes Fahren
Autonomes Fahren -
 Simultaneous Localization and Mapping
Simultaneous Localization and Mapping -
 TeraRanger ToF-Sensor
TeraRanger ToF-Sensor -
 Mission on Mars
Mission on Mars -
 Low-Cost LiDAR
Low-Cost LiDAR -
 RoboSoccer
RoboSoccer -
 Mähroboter
Mähroboter







Recherchethemen
- Verbesserungspotential der Online-Lehre und Online-Prüfungen aus Studierendensicht
- Aktivierende Lehre im Distanzunterricht aus Studierendensicht
- Leichter Einstieg in die Programmierung aus Studierendensicht
- Leichter Einstieg in Deep Learning aus Studierendensicht
- Methoden der Roboternavigation
- SLAM - Simultaneous Localization and Mapping
- Personenidentifikation
- Längsregler für einen adaptiven Geschwindigkeitsregler (ACC)
- Querregler für einen Spurhalteassistent (HC)
- Multi-Sensor-Datenfusion
Softwarethemen im Bereich künstliche Intelligenz
- Spurführung des JetRacer mit KI
Hardwarethemen
- Messaufbau: Gyroskop (Rotierende Plattform mit Servo zur Inbetriebnahme und Messung eines Gyroskops mit Arduino)
- Messaufbau: Inkrementalgeber (Ein DC-Motor dreht eine Welle auf der ein Inkrementalgeber sitzt, Messung der Inkremente mit einem Arduino)
- Messplatine (Planung und Aufbau einer Messplatine)
- Aufbau eines autonomen Fahrzeugs im Maßstab 1:10
- Erweiterung der Powerpanel-Platine des SDE Wagens um ein Multi Cell - Multi Battery Pack, Battery Management Systems (BMS)
Softwarethemen mit MATLAB
- Bewertung eines Segmentierungsalgorithmus für ein 2D-LiDAR
- Anwendungsbeispiele für ein Partikel-Filter
- Anwendungsbeispiele für ein Unscented Kalman-Filter
- Anwendungsbeispiele für ein Komplementärfilter
Softwarethemen in ROS2
- Einfacher Einstieg in ROS2
- Simulation eines AlphaBot in WeBots
- Ansteuerung eines AlphaBot mit ROS2
Digitalisierung
- Nachhaltige Dokumentation
- Onlineprüfungen mit MATLAB-Grader
- Charakterisierung der Messtechnik eines Turtle-Bot
Themenübersicht

- Elektrotechnik
- Programmierung
- Internet der Dinge
- Signal- und Bildverarbeitung
- Kameragestützte Roboterortung
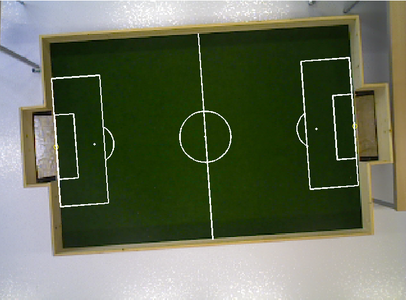
- RoboSoccer Projektor
- Kameragestützte Ortung
- Visuelle Odometrie zur Roboterbewegungsschätzung
- Matlab/Simulink
- Lokalisierung von Robotern mit
- Regelungstechnik
- Multi-Sensor-Datenfusion
- Autonome Roboter
- Autonomes Fahren
- Mobile Robotik
- Mähroboter
- NXT/EV3 Projekte
- Themengebiete aus der Carolo Cup AG
Weiterführende Links
Bitte beachten Sie die Tipps in den Artikeln
→ zurück zum Hauptartikel: Studentische Arbeiten