Praktikum Produktionstechnik

Einführung
Im Praktikum "Produktionstechnik" des 7. Semesters im Studiengang Mechatronik (Schwerpunkt "Global Production Systems") werden nach dem "learning by doing" Ansatz Maschinen entwickelt, gebaut und programmiert. In Kleingruppen á 2-3 Personen wird dabei die Ansteuerung anhand von unterschiedlicher, in der Industrie und Mikrocontroller-Welt üblichen Automationshardware (Siemens, PHOENIXCONTACT, NationalInstruments, dSPACE, Arduino) selbst erstellt und programmiert. Dies schafft fundierte Kenntnisse über die Funktionsweise produktionstechnischer Maschinen! Zur Verwirklichung der Projekte steht ein " Baukasten Automatisierung" zur Verfügung.
Leitung: Prof. Dr. Mirek Göbel
Wintersemester 2021
- Ansteuerung des UR3 Roboters mit Matlab und URSim mittels Realtime Schnittstelle
- Schachspiel mittels kollaborierendem UR-Roboter unter ROS
- Mechatronisches Produktionssystem zur Produktion eines HSHL-Getränkgeuntersetzers
- Modulares mechatronisches Produktionssystem (MPS): Station Roboter: Erweiterung Akkumanagement-System für Positionssensoren
- Modulares mechatronisches Produktionssystem (MPS): Station Roboter: Inbetriebnahme und Optimierung der Ablaufsteuerung
- Reflow-Ofen mit PLC Next Control AXC F 2152
- Smart Home: Belüftung, Anwesenheitserkennung und Lichtalarm bei Hausklingeln eines Modellhauses mithilfe einer Phoenix Contact AXC 1050 SPS
- Ampel-Demonstrator Erweiterung, aufbauend auf dem Vorjahres-Projekt Ampel-Demonstrator
Wintersemester 2020
- Inbetriebnahme eines vier-achsigen Hochgeschwindigkeits-Delta Roboter zur Sortierung von Objekten
- Ampel-Demonstrator
- Ansteuerung eines Servomotors mit Inverter (SINAMICS S210) an einem Siemens SIMATIC Open Controller (ET200SP 1515SP)
- Ansteuerung einer Schrittmotorachse mit SPS und HMI
- Automatische Belüftung eines Modellhauses mithilfe einer Phoenix Contact AXC 1050 SPS
- Ansteuerung des UR3 Roboters mit Matlab und URSim mittels Realtime Schnittstelle
Projekte im Rahmen dieses Praktikums aus den Vorjahren - im Überblick
-
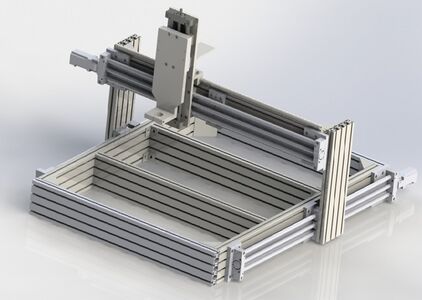 3D-CNC-Bearbeitungsmaschine
3D-CNC-Bearbeitungsmaschine -
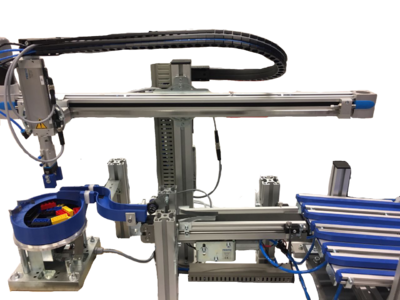
 MechatronischesProduktionsSystem
MechatronischesProduktionsSystem -
 Automatische Legostein-Montieranlage
Automatische Legostein-Montieranlage -
 3D-Drucker
3D-Drucker -
 Roboter-Zelle mit Delta-Picker-Roboter
Roboter-Zelle mit Delta-Picker-Roboter
Projekte im Rahmen dieses Praktikums aus den Vorjahren - im Detail
3D-CNC-Maschine

Allgemeingültige Artikel:
- Schrittmotor
- Schrittmotoransteuerung mit Gecko Drive
- Mikrocontrollerboard Arduino Mega 2560
- Automatisierungssystem SPS SIMATIC S7-300
- Automatisierungssystem dSpace DS1104 R&D Controller Board
Ansteuerung:
- Ansteuerung einer Schrittmotor-Achse mit Siemens SIMATIC S7-300 SPS
- Ansteuerung einer Schrittmotor-Achse mit PHOENIXCONTACT AXC 1050
- Ansteuerung_einer_Schrittmotor-Achse_mit_dSpace_DS1104 und_Matlab/Simulink
- Ansteuerung einer Schrittmotor-Achse mit Mikrocontrollern am Beispiel eines Arduino-Mega
- Ansteuerung einer Schrittmotor-Achse mit NI Labview
- Zentraler Steuerungsalgorithmus für ein 3-Achs-CNC-Bearbeitungszentrum
- Zentraler Steuerungsalgorithmus für ein 3-Achs-CNC-Bearbeitungszentrum mit Matlab/GUIDE
- Computer Aided Manufacturing (CAM)
Konstruktion:
- Konstruktion eines 3-Achs-CNC-Bearbeitungszentrums
- Weiterentwicklung eines 3-Achs-CNC-Bearbeitungszentrums mit neuen Spindelantrieben
- Erweiterung/Fehlerbehebung an dem 3-Achs-CNC-Bearbeitungszentrums und Konstruktion eines Außengehäuses
- Konstruktion, Fertigung und Inbetriebnahme eines Rundtisches (4.Achse)
- 2D-Styroporschneidewerkzeug für 3D-CNC-Bearbeitungsmaschine