Offene Themen von Prof. Schneider: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 1: | Zeile 1: | ||
== Highlights == | |||
<gallery mode="packed-overlay" heights="150"> | |||
Projekt_58_Versuchsaufbau_InversesPendel.jpg | Speedy-Tempomessgerät|Speedy-Tempomessgerät | |||
Zweiarmrobotersystem_UR10.jpg | verweis=Projekte mit dem Zweiarm-Robotersystem UR10 von Prof. Göbel|Zweiarm-Robotersystem UR10 | |||
Sammy-robot-1519210.jpg | verweis=Schlülermotivationsprojekt für Mechatronik|Konzept/Entwicklung eines Mechatronik-Schüler-Motivations-Projekts | |||
Ballbalancierer1.png | verweis=Optimierung des Ballbalancierers|Optimierung des Ballbalancierers & Regelung | |||
Wuerfel.jpg | verweis=Vollendung eines LED-Würfels|Vollendung eines LED-Würfels | |||
LEDTisch Por19.jpg | verweis=Fertigstellung_und_Verfeinerung_des_interaktiven_LED-Tisches |Fertigstellung des interaktiven LED-Tisches | |||
DSC 0007.JPG | verweis=Weiterentwicklung_Schwebende_Kugel_Nachbau |Fertigstellung/Verfeinerung/Neuentwicklung der schwebenden Weltkugel | |||
Ventilator.jpg | verweis=Entwicklung einer aktiven Wohnraumlüftung |Entwicklung einer aktiven Wohnraumlüftung | |||
CNC_Maschine_nach_Neukonstruktion_gerendert.JPG | verweis=Optimierung der 3D-CNC-Bearbeitungsmaschine|3D-CNC-Bearbeitungsmaschine | |||
LittleArmBig.JPG | verweis=Realisierung_des_"LittleArm"-Roboters_und_Anwendung_mittels_Kinect-Gestenerkennung|Realisierung des "LittleArm"-Roboters und Anwendung mittels Kinect-Gestenerkennung | |||
Sortierbox.jpg | verweis=Konzeption_und_Entwicklung_eines_Mikrocontroller_Anwendungsbaukastens |Mikrocontroller-Anwendungsbaukasten für Schulen | |||
DerRegelkreis.JPG | verweis=Regelungstechnik_mit_Tischaufbauten |Einfache Regelungstechnik-Beispiele | |||
20191108_IRB1400-Duo_imLabor.jpg | verweis=Aufbau_der_Sicherheitstechnik_und_Inbetriebnahme_ABB_Industrieroboter |Aufbau ABB Roboter | |||
Siemens_SPS_open_Controller.jpg | verweis=Regelungstechnik_Temperaturregelung_per_SiemensSPS |Regelung per Siemens-SPS | |||
SPS_von_Phoenix_Contact.JPG | verweis=Regelungstechnik_Temperaturregelung_per_PHOENIXCONTACT-SPS |Regelung per PHOENIXCONTACT-SPS | |||
<!-- Prüfstand PinOnDisc aus CAD.JPG | verweis=Projekte in der Tribologieprüftechnik|Tribologieprüftechnik --> | |||
</gallery> | |||
== Recherchethemen == | == Recherchethemen == | ||
# Verbesserungspotentiel der Online-Lehre | # Verbesserungspotentiel der Online-Lehre | ||
Version vom 25. Februar 2021, 12:36 Uhr
Highlights
-
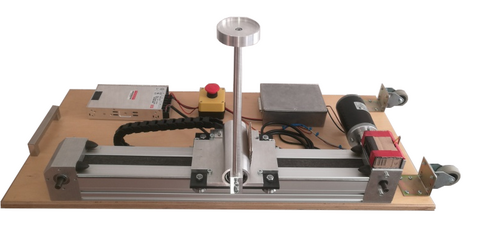 Speedy-Tempomessgerät
Speedy-Tempomessgerät -
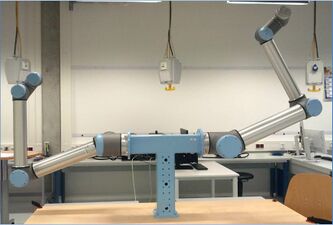 Zweiarm-Robotersystem UR10
Zweiarm-Robotersystem UR10 -
 Konzept/Entwicklung eines Mechatronik-Schüler-Motivations-Projekts
Konzept/Entwicklung eines Mechatronik-Schüler-Motivations-Projekts -
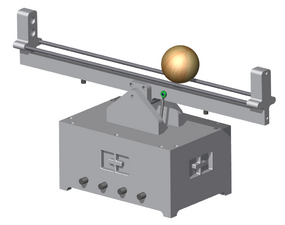 Optimierung des Ballbalancierers & Regelung
Optimierung des Ballbalancierers & Regelung -
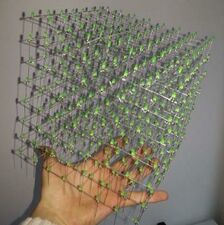 Vollendung eines LED-Würfels
Vollendung eines LED-Würfels -
 Fertigstellung des interaktiven LED-Tisches
Fertigstellung des interaktiven LED-Tisches -
 Fertigstellung/Verfeinerung/Neuentwicklung der schwebenden Weltkugel
Fertigstellung/Verfeinerung/Neuentwicklung der schwebenden Weltkugel -
 Entwicklung einer aktiven Wohnraumlüftung
Entwicklung einer aktiven Wohnraumlüftung -
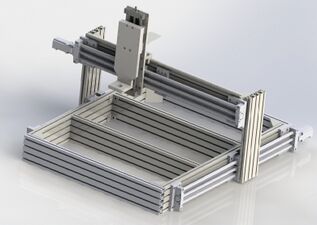 3D-CNC-Bearbeitungsmaschine
3D-CNC-Bearbeitungsmaschine -
 Realisierung des "LittleArm"-Roboters und Anwendung mittels Kinect-Gestenerkennung
Realisierung des "LittleArm"-Roboters und Anwendung mittels Kinect-Gestenerkennung -
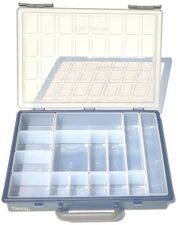 Mikrocontroller-Anwendungsbaukasten für Schulen
Mikrocontroller-Anwendungsbaukasten für Schulen -
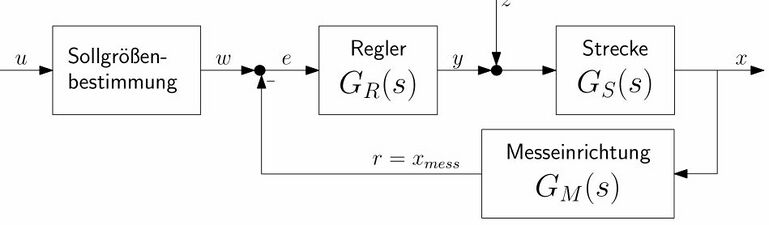 Einfache Regelungstechnik-Beispiele
Einfache Regelungstechnik-Beispiele -
 Aufbau ABB Roboter
Aufbau ABB Roboter -
 Regelung per Siemens-SPS
Regelung per Siemens-SPS -
 Regelung per PHOENIXCONTACT-SPS
Regelung per PHOENIXCONTACT-SPS

Recherchethemen
- Verbesserungspotentiel der Online-Lehre
- Aktivierende Lehre im Distanzunterricht
- Bewertung eines Segmentierungsalgorithmus für ein 2D-LiDAR
- Einsatzbeispiele für ein Partikel-Filter
- Anwendungsbeispiele für ein Unscented Kalman-Filter
- Anwendungsbeispiele für ein Komplementärfilter
Digitalisierung
- Nachhaltige Dokumentation
- Onlineprüfungen mit MATLAB-Grader
- Charakterisierung der Messtechnik eines Turtle-Bot
Themenübersicht

- Elektrotechnik
- Recherche
- Programmierung
- Internet der Dinge
- Signal- und Bildverarbeitung
- Kameragestützte Roboterortung
- RoboSoccer Projektor
- Kameragestützte Ortung
- Visuelle Odometrie zur Roboterbewegungsschätzung
- Matlab/Simulink
- Lokalisierung von Robotern mit
- Regelungstechnik
- Multi-Sensor-Datenfusion
- Autonome Roboter
- Autonomes Fahren
- Mobile Robotik
- Mähroboter
- NXT/EV3 Projekte
- Themengebiete aus der Carolo Cup AG
Bitte beachten Sie die Tipps in den Artikeln
→ zurück zum Hauptartikel: Studentische Arbeiten