Überwachungskamera: Unterschied zwischen den Versionen
| Zeile 131: | Zeile 131: | ||
| Gehäuse aus schwarzem PLA | | Gehäuse aus schwarzem PLA | ||
| ''3D-Druck'' | | ''3D-Druck'' | ||
| | |||
|- | |- | ||
| 5 | | 5 | ||
| Datenkabel und Stromkabel | | Datenkabel und Stromkabel | ||
| Litze 0.5mm^2 verschiedene Farben | | Litze 0.5mm^2 verschiedene Farben | ||
| | |||
|- | |- | ||
| 6 | | 6 | ||
| Stromanschluss | | Stromanschluss | ||
| 1m USB-3.0 Female auf Micro USB 3.0 Female Kabel (Micro USB Seite wird entfernt und abisoliert) | | 1m USB-3.0 Female auf Micro USB 3.0 Female Kabel (Micro USB Seite wird entfernt und abisoliert) | ||
| | |||
|- | |- | ||
|} | |} | ||
Version vom 11. Oktober 2022, 13:19 Uhr
Autoren: Kevin Mudzcinski & Henry Fröse
Betreuer: Prof. Göbel & Prof. Schneider
→ zurück zur Übersicht: WS 20/21: Angewandte Elektrotechnik (BSE)
→ zurück zur Übersicht: WS 21/22: Angewandte Elektrotechnik (BSE)
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)
Einleitung
Im Rahmen des GET-Fachpraktikums [[1]] entsteht das Projekt „Überwachungskamera“. Sinn des Projektes ist es, ein mechatronisches System zu entwerfen, zu fertigen und zu testen. Dabei sollen vor allem die Kenntnisse aus dem Modul Mess- und Regelungstechnik zur Hilfe genommen werden. Das System registriert mit Hilfe der Sensoren ungewöhnliche Ereignisse aufgrund von Bewegungen bzw. Geräuschen. Daraufhin macht die Kamera ein Foto und sendet dieses per Telegram-Bot [2] an den Nutzer.
An dem Projekt arbeiten die Mechatronik-Studenten Kevin Mudzcinski und Henry Fröse.
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Die Kamera wird über USB-Anschluss mit Strom versorgt.
(Kann über Powerbank und Netzteil mit Strom versorgt werden) |
Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 2 | Der PIR-Sensor registriert Bewegungen.
(Digitales HIGH/LOW-Signal wird dem Arduino Übertragen - Schwellwert wird mittels Potentiometer eingestellt) |
Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 3 | Der Sound-Sensor registriert Geräusche.
(Digitales HIGH/LOW-Signal wird dem Arduino Übertragen - Schwellwert wird mittels Potentiometer eingestellt) |
Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 4 | Die ESP32-CAM erstellt ein Foto, wenn der Bewegungs- oder der Geräuschssensor ein HIGH-Signal dem Arduino überträgt. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 5 | Der Microcontroller ist ins Heimnetzwerk mittels SSID und Passwort eingebunden. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 6 | Das Bild wird mittels Telegram-Bot an den Benutzer übertragen.
(Iteration über ID-Liste der Telegram-Accounts der Benutzer - Automatische Benachrichtigung per Telegram-App) |
Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 7 | Es können mehrere Benutzer eingebunden werden.
(Iteration über ID-Liste der Telegram-Accounts der Benutzer - Müssen manuell eingefügt werden im Programmcode) |
Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 8 | Die Benutzer haben die Möglichkeit manuell ein Bild anzufordern.
(Benutzereingabe in der Telegram-App in den Chat des Bots - Befehl "/picture") |
Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
Tabelle 1 zeigt die funktionalen Anforderungen.
Funktionaler Systementwurf/Technischer Systementwurf
-
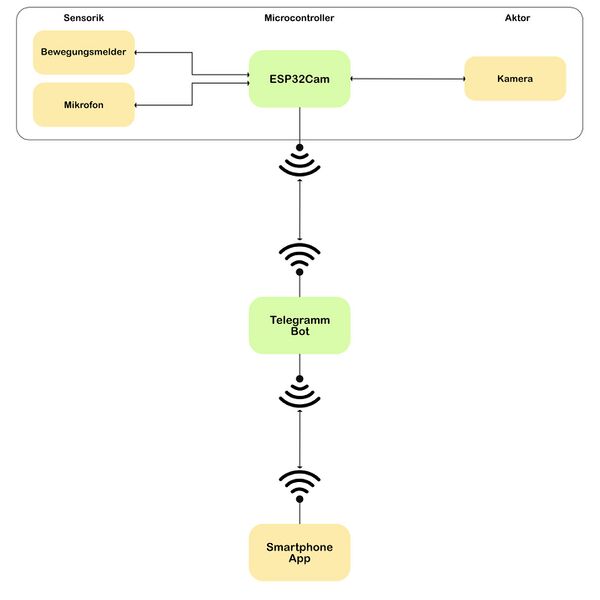 Abb. 1: Technischer Systementwurf
Abb. 1: Technischer Systementwurf

Komponentenspezifikation
| ID | Komponente | Bezeichnung | Bild |
|---|---|---|---|
| 1 | PIR Sensor | HC-SR501 | |
| 2 | Mikrofon Soundsensor | KY-038 | |
| 3 | Entwicklungsplatine inkl. Kamera | ESP32-CAM | |
| 4 | Gehäuse aus schwarzem PLA | 3D-Druck | |
| 5 | Datenkabel und Stromkabel | Litze 0.5mm^2 verschiedene Farben | |
| 6 | Stromanschluss | 1m USB-3.0 Female auf Micro USB 3.0 Female Kabel (Micro USB Seite wird entfernt und abisoliert) |
Umsetzung (HW/SW)
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan
Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)