Überwachungskamera
Autoren: Kevin Mudzcinski & Henry Fröse
Betreuer: Prof. Göbel & Prof. Schneider
→ zurück zur Übersicht: WS 20/21: Angewandte Elektrotechnik (BSE)
→ zurück zur Übersicht: WS 21/22: Angewandte Elektrotechnik (BSE)
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)
Einleitung
Im Rahmen des GET-Fachpraktikums [[1]] entsteht das Projekt „Überwachungskamera“. Sinn des Projektes ist es, ein mechatronisches System zu entwerfen, zu fertigen und zu testen. Dabei sollen vor allem die Kenntnisse aus dem Modul Mess- und Regelungstechnik zur Hilfe genommen werden. Das System registriert mit Hilfe der Sensoren ungewöhnliche Ereignisse aufgrund von Bewegungen bzw. Geräuschen. Daraufhin macht die Kamera ein Foto und sendet dieses per Telegram-Bot [2] an den Nutzer.
An dem Projekt arbeiten die Mechatronik-Studenten Kevin Mudzcinski und Henry Fröse.
-
 Abb. 1: Illustration Überwachungskamera
Abb. 1: Illustration Überwachungskamera

Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Die Kamera muss mit 5V Spannung versorgt werden. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 2 | Der PIR-Sensor muss Bewegungen registrieren und ein Bild verschicken. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 3 | Der Sound-Sensor muss Geräusche größer Vergleichspegel registrieren und ein Bild verschicken. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 4 | Die ESP32-CAM erstellt ein Foto, wenn der Bewegungs- oder der Geräuschssensor ein HIGH-Signal dem Arduino überträgt. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 5 | Der Kamera muss im Heimnetzwerk mittels SSID und Passwort eingebunden sein. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 6 | Das Bild muss an alle gewünschten Benutzer übertragen werden. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 7 | Es müssen mehrere Benutzer eingebunden werden können, die benachrichtigt werden. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 8 | Die Benutzer muss die Möglichkeit haben, manuell ein Bild anzufordern. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 9 | Die Kamera muss in 2 Dimensionen ausgerichtet werden können. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 10 | Die Kamera muss in ihrer Ausrichtung fixierbar sein. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
| 11 | Die Kamera muss mittels Schraubverbindung an Oberflächen fixierbar sein. | Henry Fröse | 01.10.2022 | Kevin Mudzinski | 11.10.2022 |
Tabelle 1 zeigt die funktionalen Anforderungen.
Funktionaler Systementwurf/Technischer Systementwurf
-
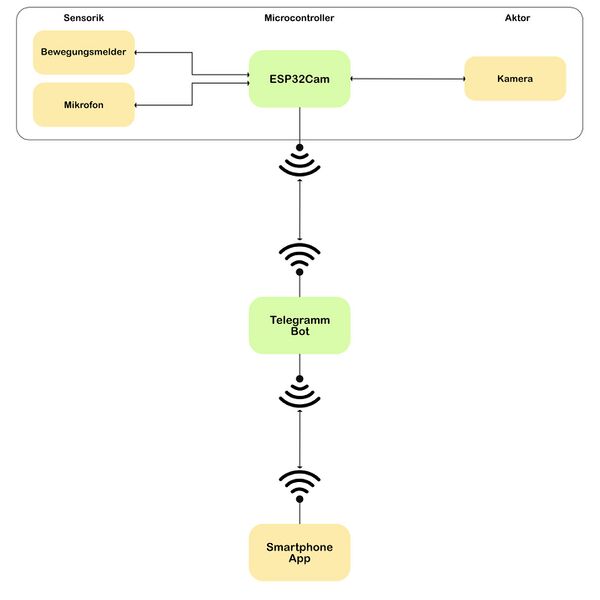 Abb. 2: Technischer Systementwurf
Abb. 2: Technischer Systementwurf -
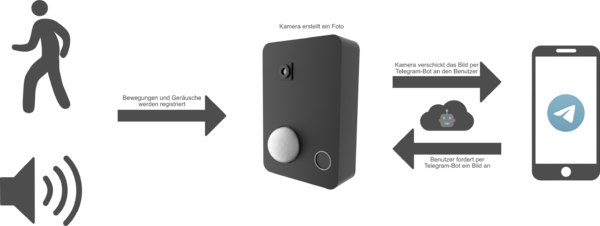 Abb. 3: Funktionaler Systementwurf
Abb. 3: Funktionaler Systementwurf


Komponentenspezifikation
| ID | Komponente | Bezeichnung | Bild |
|---|---|---|---|
| 1 | PIR Sensor | HC-SR501 |  |
| 2 | Mikrofon Soundsensor | KY-038 |  |
| 3 | Entwicklungsplatine inkl. Kamera | ESP32-CAM |  |
| 4 | Gehäuse | 3D-Druck PLA in schwarz |  |
| 5 | Datenkabel und Stromkabel | Litze 0.5mm^2 verschiedene Farben |  |
| 6 | Stromanschluss | 1m USB-3.0-Female auf Micro-USB-3.0-Female Kabel
(Micro-USB Seite wird entfernt und abisoliert) |
 |
| 7 | Verbrauchsmaterial interne Verkabelung | Schrumpfschlauch und Lötzinn |  |
Umsetzung (HW/SW)
Gehäuse
Das komplette Gehäuse ist mittels 3D-Druck erstellt worden. Die Verbindung der einzelnen Komponenten ist mittels Schrauben gelöst worden, um die Kamera leicht auseinandernehmbar zu gestalten.
Um die Verschiedenen Teile stabil Drucken zu können wurden vereinzelt Komponenten, wie z.B. die Kamerarückwand und die Verbindung an die Halterung.
Das Gehäuse ist in 3 Schichten unterteilt:
- Vorderseite (Bietet Aussparungen für die Kamera, Mikrofon und PIR),
- Mittelring (Dient zur Fixierung der Bauteile ohne diese Anzukleben / Festzuschrauben),
- Rückseite (Bietet erhöhtes Volumen für die Verkabelung und Stromzufuhr)
-
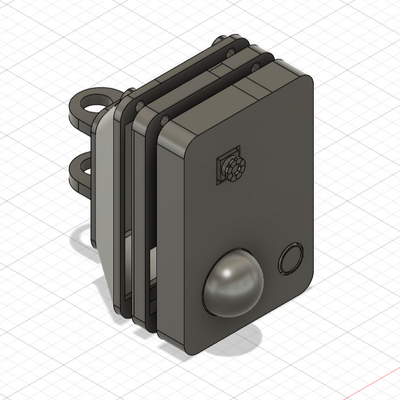 Abb. 4: CAD-Modell - Gehäuse Vorderseite
Abb. 4: CAD-Modell - Gehäuse Vorderseite -
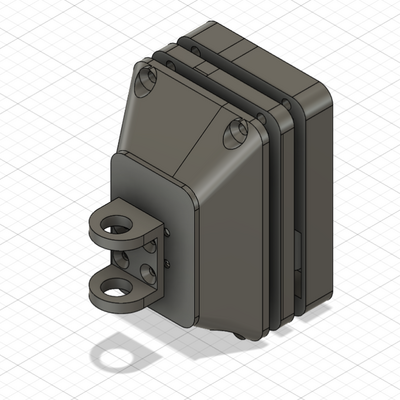 Abb. 5: CAD-Modell - Gehäuse Rückseite
Abb. 5: CAD-Modell - Gehäuse Rückseite


Halterung
Die Halterung kann in 2 Dimensionen Hoch/Runter und Links/Rechts bewegt werden. Hierbei dienen Schrauben zur Fixierung der Position, indem sie mittels "Quetschscheiben" die Bewegung verhindern.
An der Rückseite bietet die Halterung eine Platte zur Befestigung mittels Schrauben für einen Gewindedurchmesser von 4mm in allen 4 Ecken. Die U-Förmige verbindung zwischen Kameragehäuse & Halterung sowie Wandmontageplatte und Halterung wurden seperat gedruckt, da die orientierung im 3D Drucker elementar wichtig für die Stabilität und Flexibilität dieses Bauteils ist. Ohne Die seperierung würde das Bauteil beim Zusammenbau brechen.
-
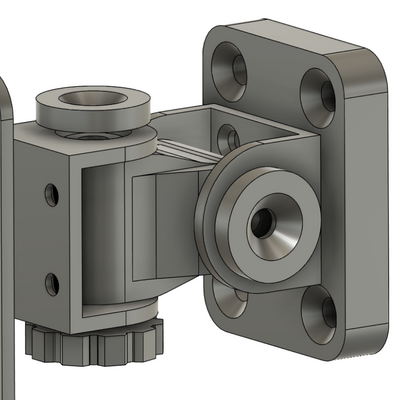 Abb. 6: CAD-Modell - Halterung
Abb. 6: CAD-Modell - Halterung -
 Abb. 7: CAD-Modell - Kamera Vorderseite
Abb. 7: CAD-Modell - Kamera Vorderseite -
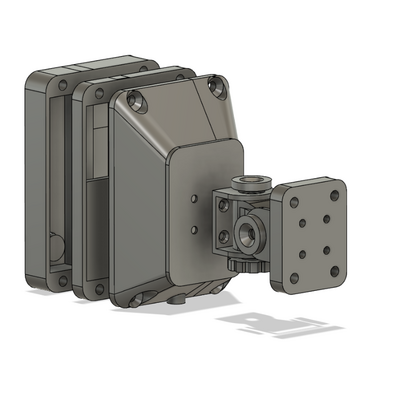 Abb. 8: CAD-Modell - Kamera Rückseite
Abb. 8: CAD-Modell - Kamera Rückseite



Schaltung
Zum Einsatz kommt der Mikrokontroller ESP32-CAM, da dieser ab Werk einen Anschluss für eine Kamera sowie Bibliotheken zum auslesen dieser verfügt.
Dieser benötigt eine 5V-Spannungsversorgung, welche wir mittels USB bereitstellen können. Dadurch kann der Anwender entscheidern, ob er die Kamera mittels Powerbank oder USB-Netzteil betreibt.
Der Mikrokontroller besitzt keine Analogen-Pins für das Mikrofon.
Aus diesem Grund sind das Mikrofon und der PIR an den digitalen Pins des Mikrokontrollers angeschlossen. Mittels Widerstand wird ein Schwellwert auf dem Mikrofon und PIR-Sensor eingestellt.
Der Wifi-Chip ist ebenfalls auf dem Mikrokontroller vorhanden, sodass kein extra Modul benötigt wird.
-
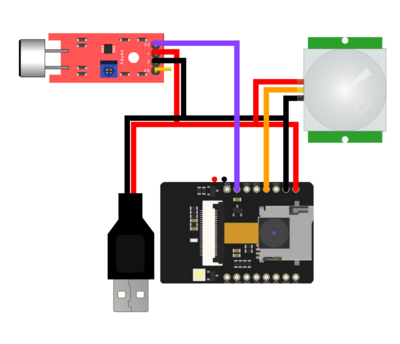 Abb. 9: Schaltung
Abb. 9: Schaltung -
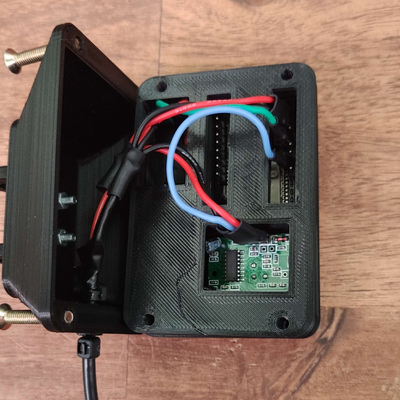 Abb. 10: Verkabelung
Abb. 10: Verkabelung


Code
Die Implementierung von Telegramm und das Verschicken von Bildern ist in Anlehnung an "Random Nerd Tutorial" implementiert worden.
In "BOT_TOKEN" muss der Unique-Token des Erstellten Bots eingefügt werden. In "USER_CHAT_IDS" können eine beliebige Anzahl von Telegramm Accounts eingebunden werden, die ein Bild erhalten wollen.
Mit dem Befehl "/picture" kann ein manuell erstelltes Bild angefordert werden.
Mithilfe von den Variablen "motionState" und "micState" kann verhindert werden, dass aufgrund des selben Eingangssignals 2 identische Bilder direkt hintereinander versendet werden.
-
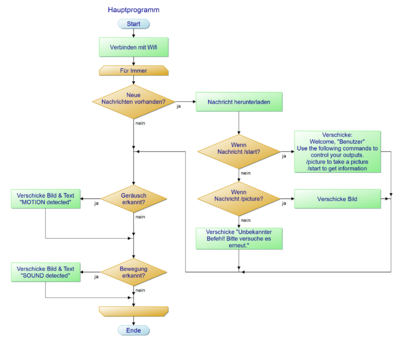 Abb. 11: Programmablaufsplan
Abb. 11: Programmablaufsplan

Zusammenbau
Beim Zusammenbau wurde darauf geachtet, dass die Kabel nicht direkt an die Kontakte gelötet werden, um später noch Änderungen am Programmcode vornehmen zu können.
Aus diesem Grund sind die Sensoren und der Mikrokontroller mittels Steckverbinder verschaltet.
Komponententest
| ID | Inhalt | Getestet von | Datum |
|---|---|---|---|
| 1 | Die Kamera muss mit 5V Spannung versorgt werden. | Kevin Mudzinski | 11.10.2022 |
| 2 | Der PIR-Sensor muss Bewegungen registrieren und ein Bild verschicken. | Kevin Mudzinski | 11.10.2022 |
| 3 | Der Sound-Sensor muss Geräusche größer Vergleichspegel registrieren und ein Bild verschicken. | Henry Fröse | 01.10.2022 |
| 4 | Die ESP32-CAM erstellt ein Foto, wenn der Bewegungs- oder der Geräuschssensor ein HIGH-Signal dem Arduino überträgt. | Henry Fröse | 01.10.2022 |
| 5 | Der Kamera muss im Heimnetzwerk mittels SSID und Passwort eingebunden sein. | Kevin Mudzinski | 11.10.2022 |
| 6 | Das Bild muss an alle gewünschten Benutzer übertragen werden. | Kevin Mudzinski | 11.10.2022 |
| 7 | Es müssen mehrere Benutzer eingebunden werden können, die benachrichtigt werden. | Henry Fröse | 01.10.2022 |
| 8 | Die Benutzer muss die Möglichkeit haben, manuell ein Bild anzufordern. | Kevin Mudzinski | 11.10.2022 |
| 9 | Die Kamera muss in 2 Dimensionen ausgerichtet werden können. | Henry Fröse | 01.10.2022 |
| 10 | Die Kamera muss in ihrer Ausrichtung fixierbar sein. | Henry Fröse | 01.10.2022 |
| 11 | Die Kamera muss mittels Schraubverbindung an Oberflächen fixierbar sein. | Kevin Mudzinski | 11.10.2022 |
Tabelle 3 zeigt, welche Anforderung von wem getestet wurde
Ergebnis
Die Überwachungskamera ist vielseitig einsetzbar. Unter anderem auch als Baby-Cam.
Hier ein Video:
Zusammenfassung
Lessons Learned
Bei der Umsetzung des Projektes mussten wir feststellen, dass die Ausrichtung von kleinen Bauteilen auf dem 3D-Drucker von größter Relevanz ist, um die Stabilität der Bauteile sicherstellen zu können.
Des Weiteren haben wir gelernt, dass sich Telegramm gut dafür eignet, schnell Daten, wie Text und Bild, verschiedenen Personen zu übermitteln, ohne eine eigene Server- & Benachrichtigungs-Infrastruktur zu erstellen.
Projektunterlagen
Projektplan
-
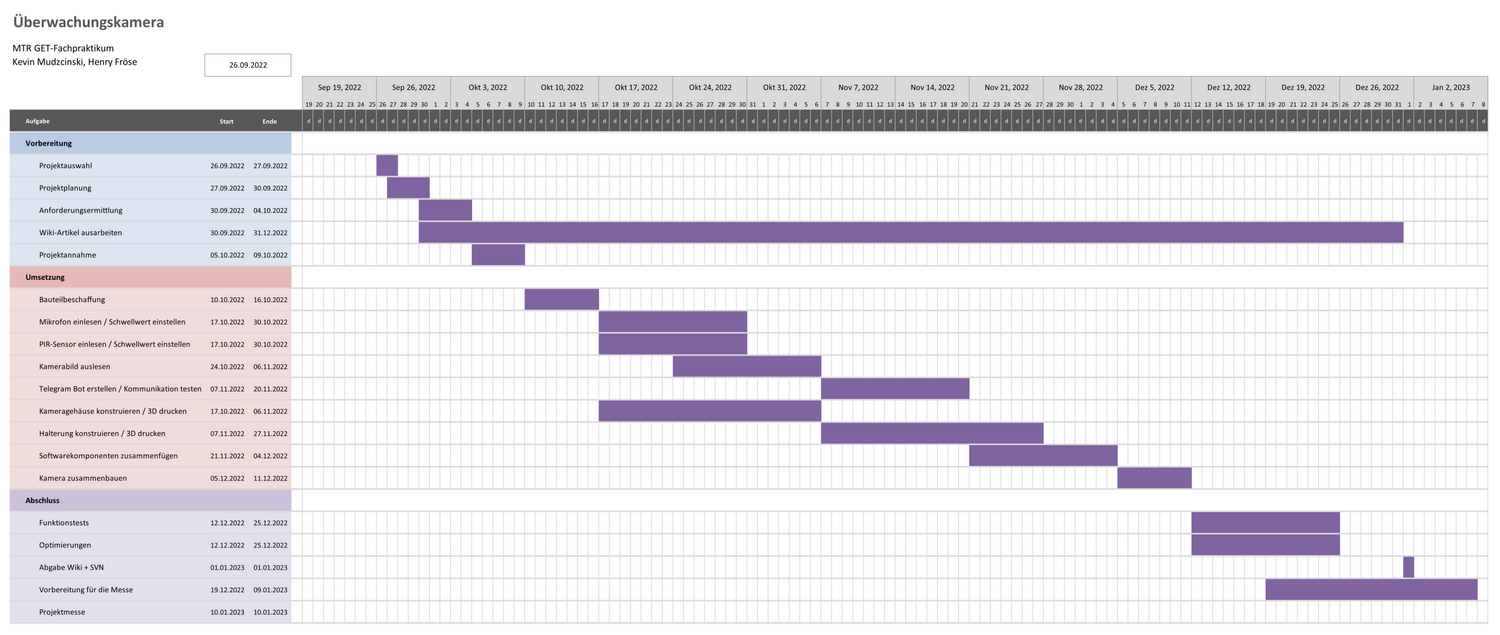 Abb.12: Projektplan als Gantt-Diagramm
Abb.12: Projektplan als Gantt-Diagramm

Projektdurchführung
| ID | Meilensteine | Erledigt am | Erledigt von |
|---|---|---|---|
| 1 | PIR Sensor wird vom Mikrocontroller eingelesen und detektiert Bewegung korrekt | 12.10.2022 | Henry Fröse |
| 2 | Mikrofon wird vom Mikrocontroller eingelesen und detektiert Lautstärke korrekt | 28.10.2022 | Henry Fröse |
| 3 | Inbetriebnahme der Kamera mittels enthaltenem Beispielprogramm | 04.11.2022 | Henry Fröse |
| 4 | Verbinden des Mikrocontrollers mit dem Heimnetzwerk | 08.11.2022 | Henry Fröse |
| 5 | Erstellung eines Telegramm-Bots | 09.11.2022 | Kevin Mudczinski |
| 6 | Verbindung zwischen Telegram-Bot und Mikrocontroller aufgebaut | 14.11.2022 | Kevin Mudczinski |
| 7 | Erstellung einfacher Testbefehle mit Textzurückgabe | 15.11.2022 | Kevin Mudczinski |
| 8 | Verschicken von Bilder mittels Telegram-Bot | 17.11.2022 | Kevin Mudczinski |
| 9 | Automatische Versendung von Bildern bei Bewegungen und Geräuschen | 20.11.2022 | Henry Fröse |
| 10 | Entwicklung eines Gehäuses | 05.11.2022 | Kevin Mudczinski |
| 11 | Entwicklung einer Wandhalterung für die Kamera | 27.11.2022 | Kevin Mudczinski |
| 12 | Löten und Zusammenbau der Kamera mit Sensoren | 08.12.2022 | Kevin Mudczinski |
CAD-Modelle
ZIP-File mit allen CAD-Modellen: Überwachungskamera
Programmcode
ZIP-File mit dem Programmcode: Programmcode
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)