SoSe24 - Praktikum Systementwurf - Spurerkennung mit Kamera (Modul OSE): Unterschied zwischen den Versionen
| Zeile 311: | Zeile 311: | ||
* MATLAB<sup>®</sup>-Skript: <code>zeigeSpurpolynom.m</code> | * MATLAB<sup>®</sup>-Skript: <code>zeigeSpurpolynom.m</code> | ||
* Darstellung des Spurpolynoms für jedes Einzelbild des Films. | * Darstellung des Spurpolynoms für jedes Einzelbild des Films. | ||
* Visuelle Überprüfung durch Einblendung in das | * Visuelle Überprüfung durch Einblendung in das Ergebnisvideo: <code>GeradeInKurve_Spurpolynom.mp4</code> | ||
* Spurparameter [a b c] als <code>Spurpolynom.mat</code> | * Spurparameter [a b c] als <code>Spurpolynom.mat</code> | ||
* Dokumentation im [[SoSe24 - Praktikum Systementwurf - Spurpolynom|Wiki-Artikel]] | * Dokumentation im [[SoSe24 - Praktikum Systementwurf - Spurpolynom|Wiki-Artikel]] | ||
Version vom 18. Juni 2024, 13:27 Uhr

| Autor: | Prof. Dr.-Ing. Schneider |
| Thema: | Spurerkennung mit Kamera (OSE) |
| Workshoptermin 9: | 20.06.2024 |
| Lernzielkontrolle 3: | 04.07.2024 |
Einleitung
Die Workshops im SDE Praktikum sollen die Studierenden das praktische Arbeiten in einem Mechatroniklabor im Bereich modellbasierte Entwicklung mit MATLAB/Simulink und DSpace Hardware DS1104/ControlDesk vermitteln. Der Umgang soll in der Selbstlernzeit geübt werden.
Im Projekt OSE werden Objekte mit dem LiDAR-Sensor erkannt und verarbeitet sowie die Fahrspur mit der Kamera. Dieser Workshop fokussiert die Spurerkennung sowie die Bildung und des Spurpolynoms.
Lernziele
Nach erfolgreicher Teilnahme am Workshop:
- können Sie die intrinsischen und extrinsischen Parameter einer Kamera bestimmen.
- können Sie eine Inverse Perspektiventransformation durchführen.
- können Sie Fahrbahnmarkierungen segmentieren.
- können Sie das Spurpolynom maßstabsgetreu bestimmen.
Bewertung
Die Bewertung erfolgt im Rahmen der Lernzielkontrolle 3.
Voraussetzungen
- Für den Workshop benötigen Sie MATLAB/Simulink in der Version 2019b.
- Studieren Sie die Praktikumsordnung.
- Die unter Vorbereitung aufgeführten Aufgaben sind vor dem Workshoptermin vorzubereiten. Der Workshop baut auf Ihre Vorbereitung auf.
Der Workshop setzt nachfolgende Kenntnisse voraus:
- die Grundlagen der Programmierung,
- der Umgang mit der Versionsverwaltung SVN und
- der Umgang mit MATLAB/Simulink.
- der Grundlagen der Digitalen Signal- und Bildverarbeitung:
- Lektion 2: Koordinatentransformationen
- Lektion 7: Kantenerkennung und Rauschunterdrückung
- Lektion 8: Datengetriebene Segmentierung
Ablauf des Praktikums
| Uhrzeit | Agenda | Form |
|---|---|---|
| 8:15 | Begrüßung | Moderation durch Marc Ebmeyer |
| 8:20 | Bearbeitung der Aufgaben (vgl. Tabelle 2) | Gruppenarbeit |
| 10:10 | Statusbericht der Teams | max. 5 Min. pro Team |
| 10:25 | Verabschiedung | Moderation durch Marc Ebmeyer |
| 10:30 Uhr | Veranstaltungsende |
Vorbereitung
Aufgabe 9.1: Vorbereitung der Kamera

Um eine Kamera sinnvoll zur Spurerkennung einsetzen zu können, muss diese zuvor kalibriert werden.
- Studieren Sie die zugehörigen Wiki-Artikel und arbeiten Sie sich in die Camera Calibrator App von MATLAB® ein.
- Messen Sie die extrinsische und intrinsische Parameter der Kameras von Wagen 1 und 2 mit der MATLAB® Camera Calibrator App.
- Identifizieren Sie extrinsische und intrinsische Parameter.
- Machen Sie ein Foto eines vermessenen Aufbaus.
- Transformieren Sie einen vermessenen Punkt von Weltkoordinaten in Bildkoordinaten.
- Machen Sie ein Foto mit der Kamera auf der Fahrbahn von der Startlinie aus (Geradeaus.jpg).
- Machen Sie ein Foto mit der Kamera auf der Fahrbahn von der ersten Kurve aus (Linkskurve.jpg).
- Entzerren Sie beide Fotos anhand Ihrer ermittelten k-Matrix mit dem MATLAB®-Skript
entzerreVideobild. - Dokumentieren Sie Ihren Versuchsaufbau, die Durchführung und Ergebnisse.
Arbeitsergebnisse:
- Extrinsische Kameraparameter:
- Intrinsische Kameraparameter: k-Matrix
- Eingangsdaten: Geradeaus.jpg, Linkskurve.jpg
- MATLAB®-Skript
entzerreVideobild, welches anhand der intrinsischen Kameraparameter die Bildentzerrung durchführt. - Versuchsprotokoll
Kamerakalibrierung.docx
Lernzielkontrollfragen:
- Welche intrinsischen und extrinsischen Kameraparameter haben Wagen 1 und 2?
- Welchen Region-of-Interest (ROI) haben die Kameras?
- Wie ist der Zusammenhang zwischen Welt- und Bildkoordinaten?
- Welchen Blindbereich in Fahrzeugkoordinaten haben Wagen 1 und 2 ()?
Links
- HSHL-Wiki: Kalibrierung_der_Kamera
- MATLAB® Camera Calibrator App
- OSE:_Bildverarbeitung_mit_Spurerkennung
| Tipps |
|
Aufgabe 9.2: Segmentierung der Fahrbahnmarkierungen



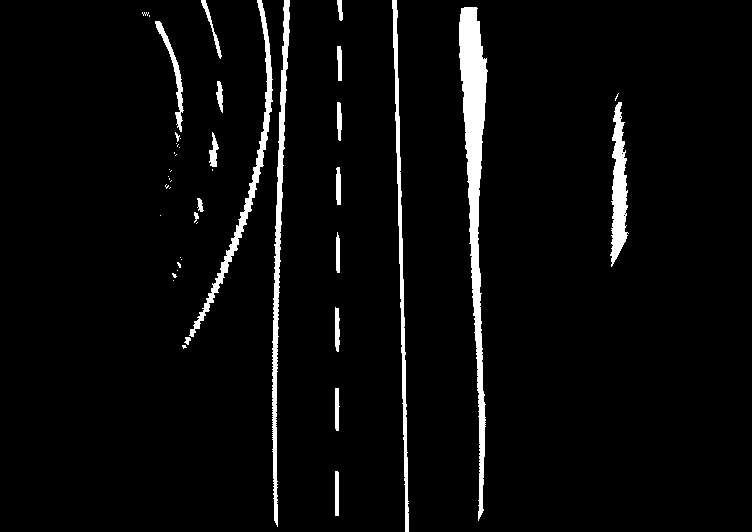
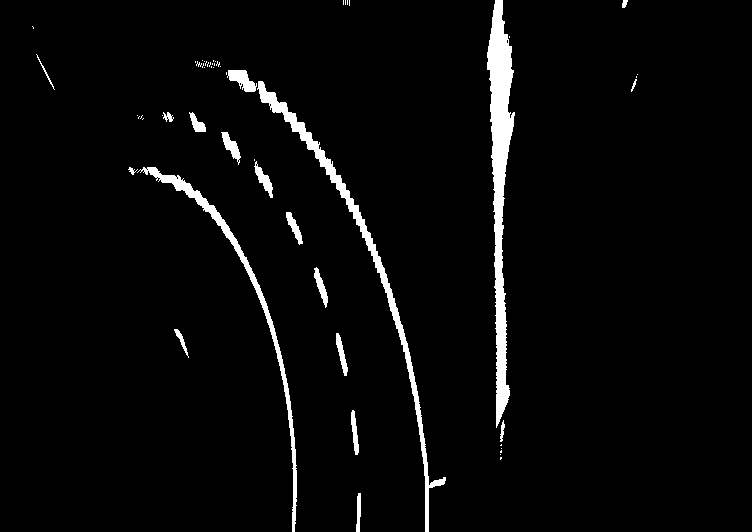
- Laden Sie das Bild
Spurkandidaten_F040.png(vgl. Abb. 3). - Segmentieren Sie aus dem Kantenbild die rechte Fahrbahnmarkierungen. Welche Algorithmen der Vorlesung "Digitale Signal und Bildverarbeitung" lassen sich anwenden?
- Zeigen Sie das Segment farbig im Bild an.
- Verifizieren Sie Ihren Segmentierungsalgorithmus mit den Bildern Spurkandidaten F160.png und Spurkandidaten F350.png.
Eingangsdateien:
{kind=link}
{kind=link}
{kind=link}
Arbeitsergebnisse:
- Segmentierung der X-Y-Daten der rechten Fahrspuren für die unterschiedlichen Eingangsdateien mit dem Skript
segmentiereFahrbahnmarkierung.m. - Segmentmaske als Mat-Datei z. B.
Spurkandidaten F040.mat.
Lernzielkontrollfragen:
- Welche Methoden kennen Sie aus der Vorlesung "Digitale Signal- und Bildverarbeitung", um eine Fahrspur zu segmentieren? Stellen Sie 5 unterschiedliche Ansätze vor.
- Welche Merkmale sind für eine Fahrspur signifikant.
- Welche Fehlereinflüsse gibt es? Wie kann man diesen entgegenwirken?
| Tipp 1 |
|
| Tipp 2: Einfärben der Fahrspur |
stDateiname = 'Spurkandidaten_F040.png';
aFrame = uint8(imread(stDateiname)); % Bild laden
load([stDateiname(1:end-3),'mat']); % Spurkandidaten laden
R = 255 * aFrame;
G = 255 * aFrame;
B = 255 * aFrame;
B = B.*uint8(~aRechteFahrspur); % Maske anwenden
aRGBBild = cat(3, R, G, B); % RGB-Bild erzeugen
imshow(aRGBBild);
|
| Musterlösung |
 |
| Programmablaufplan |
 |
Aufgabe 9.3: Spurpolynom

- Bestimmen Sie für die rechte Fahrbahnmarkierungen das Spurpolynome 2. Ordnung mit
polyfit. - Ersetzen Sie
polyfitdurch die einfache PolynomapproximationinterpoliereFahrspur.m. - Berechnen Sie aus dem Spurpolynom die rechte Fahrbahnmarkierungen.
- Blenden Sie die rechte Fahrbahnmarkierungen im Videobild für die Bildframes 40, 160 und 350 ein.
Demo: https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Software/Demos/Lane_Tracking
Eingangsdaten:
- Medium:Spurkandidaten.zip
interpoliereFahrspur.mals Alternative zupolyfit
Arbeitsergebnis: Spurpolynome für die Bildframes 40, 160 und 350, visuelle Überprüfung durch Einblendung in die Bilddateien zeigeSpurpolynom.m (vgl. Abb. 8)
Lernzielkontrolle:
- Wie lauten die Umrechnungsfaktoren Pixel in m in xF- und yF-Richtung.
- Welche Vor- und Nachteile hat die Polynombildung?
- Wie könnten die Nachteile behandelt werden?
- Wie wird der Blindbereich vorm Fahrzeug berücksichtigt?
Dokumente:
| Tipps |
Wandeln Sie die Maske mit find in einen Vektor.
|
| Die Koordinatentransformation Bild- zu Fahrzeug-KOS besteht aus einer Verschiebung und der Umrechnung Pixel zu m. Informationen zu den KOS finden Sie in den Dokumenten Lastenheft_Autonomes_Fahrzeug.pdf und Schnittstellendokumentation_Anlage_Lastenheft.docx. |
Nutzen Sie für die Polynomregression polyfit und alternativ interpoliereFahrspur.m.
|
|
Verwenden Sie die LaTeX-Notation im Titel. title(['p(x)=',num2str(p(1)),'$$\frac{1}{m} \cdot x^2 + $$',num2str(p(2)),'$$ \cdot x + $$',num2str(p(3)),'$$\,m$$'],'interpreter','latex')
|
| Programmablaufplan |
 |
Durchführung
Themen der Teams
| # | Thema | Teilnehmer |
|---|---|---|
| 1 | 9.4 Inverse Perspektiventransformation (IPT) | Daniel Block, Paul Janzen |
| 2 | 9.5 Segmentierung der Fahrbahnmarkierungen | Dennis Fleer, Philipp Sander |
| 3 | 9.6 Spurpolynom | Yunkai Lin, Xiangyao Liu, Yuhan Pan |
Aufgabe 9.4: Inverse Perspektiventransformation (IPT)
- Studieren Sie den Artikel zur Inversen Perspektiventransformation mit MATLAB®.
- Beschreiben Sie die Eingangsparameter. Nutzen Sie die Parameter aus Aufgabe 9.1.
- Beschreiben Sie die Ausgangsparameter.
- Kalibrieren und Entzerren Sie das Kamerabild.
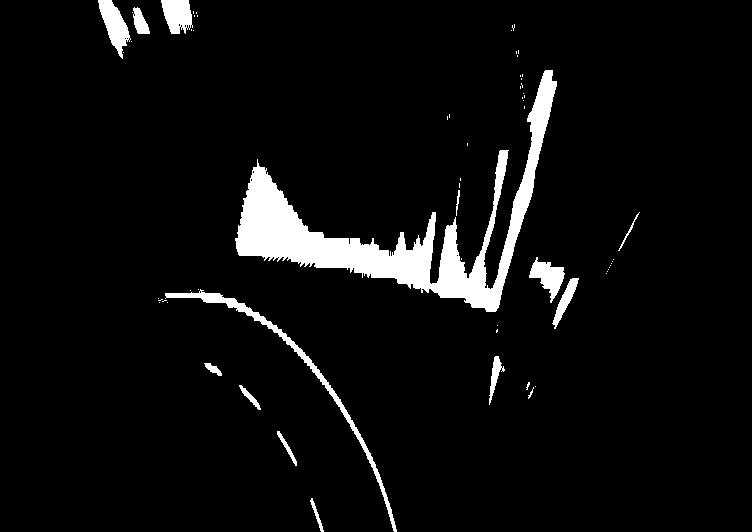
- Wenden Sie die IPT auf das Video
GeradeInKurve.mp4an. - Binarisieren Sie das Video und speichern Sie es als
GeradeInKurve_IPT.mp4. - Analysieren Sie Ihr Ergebnis, identifizieren Sie Probleme und entwickeln mögliche Maßnahmen. Eine Umsetzung der Maßnahmen ist nicht erforderlich.
Eingangsdateien: SVN: GeradeInKurve.mp4
Arbeitsergebnisse:
- MATLAB®-Skript:
startInversePerspektivenTransformation.m - Transformiertes Video:
GeradeInKurve_IPT.mp4 - Dokumentation im Wiki-Artikel
Lernzielkontrollfragen:
- Wofür werden die Kamerakalibrierparameter verwendet?
- Was ist ein region-of-interest (ROI)? Wie wird dieser gewählt.
- Wie führt man eine effektive Binarisierung durch?
- Welche Fehler zeigen sich im Binärbild? Wie lassen sich diese beheben?
| Tipps |
| Nützliche MATLAB®-Befehle: monoCamera, birdsEyeView, VideoWriter, hasFrame, readFrame, undistortImage, transformImage, im2frame, writeVideo, open, close |
| Nutzen Sie die Color Thresholder App für die Binarisierung. |
| Nutzen Sie die MATLAB®-Funktion transformImage für die IPT. |
| Beispiel: Bilder als Video speichern. |
hAusgabeVideo = VideoWriter('GeradeInKurve_IPT.mp4','MPEG-4');
hAusgabeVideo.FrameRate = 30;
hAusgabeVideo.Quality = 90;
open(hAusgabeVideo)
aFrame = im2frame(uint8(aBild),colormap(gray(2))); % Bild in Frame wandeln
writeVideo(hAusgabeVideo,aFrame);
close(hAusgabeVideo)
|
| Programmablaufplan |
Aufgaben 9.5: Segmentierung der Fahrbahnmarkierungen
- Segmentieren Sie die drei Fahrspuren aus dem Video
GeradeInKurve_IPT.mp4. - Zeigen Sie dieses Segmente in den Farben laut Tabelle 3 im Video an.
- Sichern Sie das Ergebnisvideo.
- Analysieren Sie Ihr Ergebnis, identifizieren Sie Probleme und entwickeln mögliche Maßnahmen. Eine Umsetzung der Maßnahmen ist nicht erforderlich.
| rechte Fahrbahnmarkierung | Gelb (y)
|
| Mittelstreifen | Grün (g)
|
| linke Fahrbahnmarkierung | Magenta (m)
|
Eingangsdateien: GeradeInKurve_IPT.mp4
Arbeitsergebnisse:
- MATLAB®-Skript:
segmentiereFahrbahnmarkierungen.m - Darstellung des Fahrspursegmente für jedes Einzelbild des Films.
- Visuelle Überprüfung durch Einblendung in das
Ergebnisvideo:GeradeInKurve_Segmente.mp4 - Sicherung der Segmente in
GeradeInKurve_Segmente.mat - Dokumentation im Wiki-Artikel
Lernzielkontrolle:
- Mit welchen Ansätzen lassen sich die Mittle- und rechte Fahrspur segmentieren?
- Wieso sollten alle Fahrbahnränder segmentiert werden?
- Wie wird der Blindbereich vorm Fahrzeug berücksichtigt?
Aufgaben 9.6: Spurpolynom
- Bestimmen Sie für die drei Spursegmenten das Spurpolynome 2. Ordnung mit
interpoliereFahrspur.mgemäß Schnittstellendokumentation_Anlage_Lastenheft.docx metrisch im Fahrzeugkoordinatensystem. - Blenden Sie das Spurpolynom im Videobild ein.
Eingangsdateien:
GeradeInKurve_Segmente.matinterpoliereFahrspur.m
Arbeitsergebnisse:
- MATLAB®-Skript:
zeigeSpurpolynom.m - Darstellung des Spurpolynoms für jedes Einzelbild des Films.
- Visuelle Überprüfung durch Einblendung in das Ergebnisvideo:
GeradeInKurve_Spurpolynom.mp4 - Spurparameter [a b c] als
Spurpolynom.mat - Dokumentation im Wiki-Artikel
Lernzielkontrolle:
Nützlicher Link
- Allgemeine Anforderungen an ein Versuchsprotokoll
- MATLAB®-Skript, welches die Messung in eine Auswertedatei umwandelt: funktion_wandle_dspacemess_in_CCF_mess.m
→ zurück zum Hauptartikel: Praktikum SDE | SDE-Team 2024/25