Fahrzeughardware - Wagen 2: Unterschied zwischen den Versionen
| Zeile 13: | Zeile 13: | ||
== Systemstruktur == | == Systemstruktur == | ||
=== Systemarchitekur === | === Systemarchitekur === | ||
<gallery widths=" | <gallery widths="600" heights="400"> | ||
Datei:Carolo_Systemarchitektur.jpg|600px|Abbildung 2: Systemstruktur des 2. Fahrzeuges | Datei:Carolo_Systemarchitektur.jpg|600px|Abbildung 2: Systemstruktur des 2. Fahrzeuges | ||
</gallery> | </gallery> | ||
Version vom 13. Januar 2024, 22:10 Uhr
Autor: Prof. Dr.-Ing. Schneider
Übersicht
-
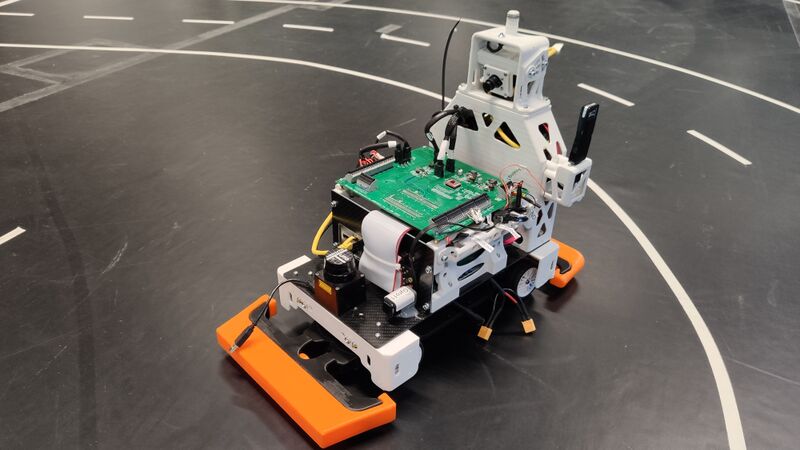 Abbildung 1: Fahrzeug 2
Abbildung 1: Fahrzeug 2

Systemstruktur
Systemarchitekur
-
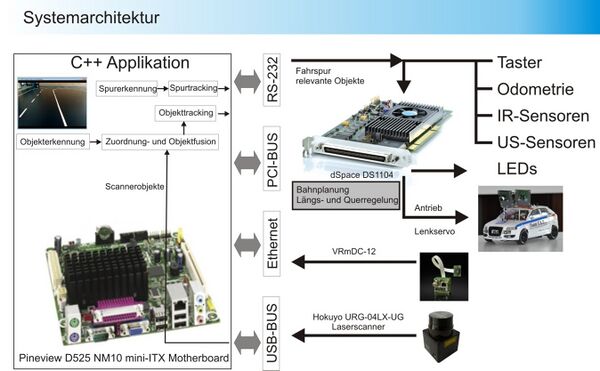 Abbildung 2: Systemstruktur des 2. Fahrzeuges
Abbildung 2: Systemstruktur des 2. Fahrzeuges

Ordnerstruktur
Inbetriebnahme
Die Inbetriebnahme des Fahrzeugs kann mittels des Inbetriebnahme_Tests.docx vorgenommen werden. Hierbei beschreibt das Dokument alle notwendigen Schritte und Informationen, wie:
- Die benötigten Files und wo diese zu finden sind,
- Die Handhabung der Akkus,
- Das Testen der Sensoren und Aktoren mittels ControlDesk,
- Die benötigten Oberflächen in ControlDesk,
- Das Testen der Fahrzeugkamera
und vieles mehr.
Falls die Informationen über die Handhabung der Akkus, wie bspw. das Laden derer, wie im Dokument beschrieben nicht ausreichen sollte, kann der folgende Artikel zu Rate gezogen werden: Akkus messen und laden
Weitere Informationen zum Ein- und Ausschalten des Fahrzeuges anhand des Fahrzeugs 1 finden Sie unter: Fahrzeug hoch-/runterfahren.
Gesamtaufbau
Das Fahrzeug basiert auf einem normalen 1:10 RC-Fahrzeug der Firma LRP. Auf dessen Grundgerüst ist ein DS1104 R&D Controller Board der Firma DSpace installiert, mit welchem alle angebrachten Sensoren verbunden sind.
Über einen VGA-Anschluss an der Front des Fahrzeugs hinter dem Laserscanner kann der Boardcomputer mit einem Monitor verbunden werden.
Insgesamt besteht das Fahrzeug aus einzelnen Baugruppen. Die allgemeine Grundlage bildet die Grundplatte, auf der das Mainboard und die weiteren Baugruppen befestigt ist. Die Grundplatte ist an dem Grundgerüst des gewöhnlichen RC-Fahrzeuggestells befestigt.
Fahrzeuggestell
-
 Abbildung 3: Fahrzeuggestell des Fahrzeugs
Abbildung 3: Fahrzeuggestell des Fahrzeugs

Maße der Grundplatte
-
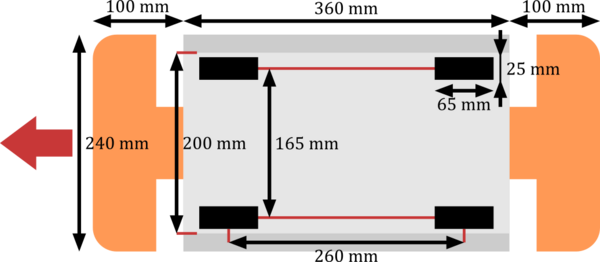 Abbildung 4: Abmessungen des Fahrzeugs in der Draufsicht
Abbildung 4: Abmessungen des Fahrzeugs in der Draufsicht -
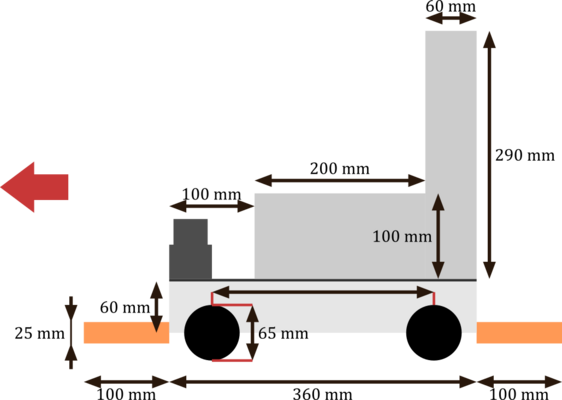 Abbildung 5: Abmessungen des Fahrzeugs in der Seitenansicht
Abbildung 5: Abmessungen des Fahrzeugs in der Seitenansicht


Position der Sensoren
Die Sensoren des Fahrzeuges gliedern sich wie folgt:
- Vier IR-Sensoren (zwei an einer Seite und zwei am Heck des Fahrzeuges),
- Eine Kamera,
- Ein LiDAR,
- Hall-Sensoren im Motor,
sowie ein Gyro zum Messen der Gierrate um die z-Achse auf der Platine.
-
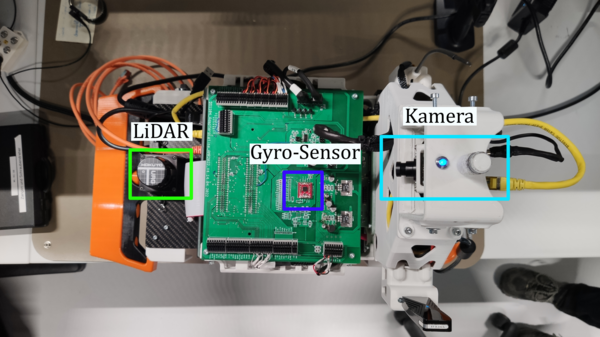 Abbildung 6: Überblick über die Sensoren des Fahrzeugs in der Draufsicht
Abbildung 6: Überblick über die Sensoren des Fahrzeugs in der Draufsicht -
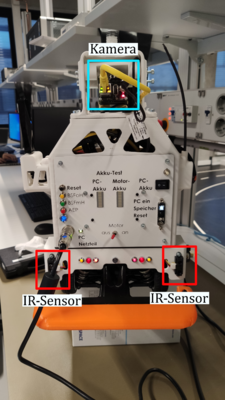 Abbildung 7: Überblick über die Sensoren des Fahrzeugs mit der Sicht auf die Rückseite
Abbildung 7: Überblick über die Sensoren des Fahrzeugs mit der Sicht auf die Rückseite -
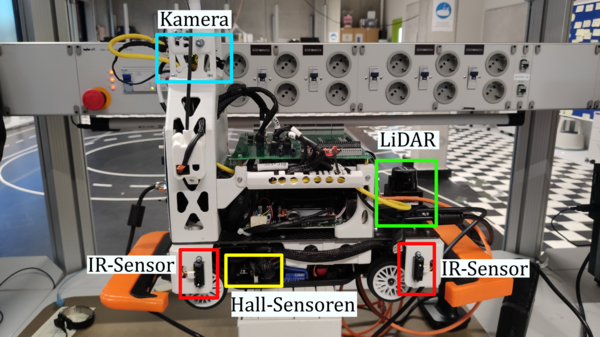 Abbildung 8: Überblick über die Sensoren des Fahrzeugs in der Seitenansicht
Abbildung 8: Überblick über die Sensoren des Fahrzeugs in der Seitenansicht



Power Panel
Über das Powerpanel am Heck des Fahrzeuges können:
- Die Fahrmodi eingestellt,
- Das Fahrzeug ein- und ausgeschaltet,
- Die Akkuunterstützung zugeschaltet,
- Die Akkuspannung mittels des Akkutesters gemessen
und das PC-Netzteil verbunden werden.
-
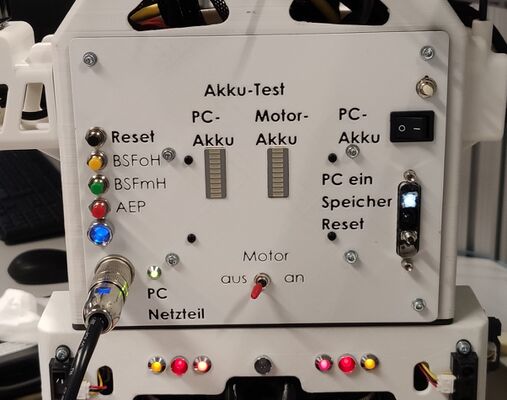 Abbildung 9: Power Panel auf der Rückseite des Fahrzeugs
Abbildung 9: Power Panel auf der Rückseite des Fahrzeugs

Test Kamera
-
 Abbildung 10: Test Kamera des Fahrzeugs
Abbildung 10: Test Kamera des Fahrzeugs

Sensoren und Aktoren
Im Folgenden werden alle relevanten Artikel für jeden Sensor und Aktor des Fahrzeugs aufgelistet.
Kamera
Gierraten Sensor
Infrarot-Abstandssensoren
Hall-Sensoren
LiDAR
Taster
Fernbedienung
Motorsteuergerät
Literatur
[HeSch09] Hesse, Stefan; Schnell, Gerhard: Sensoren für die Prozess- und Fabrikautomation, Auflage 4; Wiesbaden, 2009
[KlCD12] Klein, Daniel; Carolo_Doku_2012: Die Hallsensorik, S.174 ff., Lippstadt, 2012
→ zurück zum Hauptartikel: Praktikum SDE
→ zu erstem Fahrzeug: Fahrzeug 1