Benutzer:Prof. Mirek Göbel: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| (70 dazwischenliegende Versionen von 3 Benutzern werden nicht angezeigt) | |||
| Zeile 2: | Zeile 2: | ||
Lehrgebiet Regelungstechnik | Lehrgebiet Regelungstechnik | ||
Hochschule Hamm-Lippstadt | Hochschule Hamm-Lippstadt | ||
Details siehe [https://www.hshl.de/personen/prof-dr-ing-mirek-g%C3%B6bel Link zur HSHL-Webseite] | Details siehe [https://www.hshl.de/personen/prof-dr-ing-mirek-g%C3%B6bel Link zur HSHL-Webseite] | ||
= Laufende Projekte = | |||
<gallery | <!-- Prof. Göbel vom 09.02.2016: Modus "packed-overlay" funktioniert noch nicht wie auf [https://de.wikipedia.org/wiki/Hilfe:Galerie] beschrieben. --> | ||
<gallery mode="packed-overlay" heights="300"> | |||
Prüfstand PinOnDisc aus CAD.JPG | verweis=Tribologieprüftechnik|Tribologieprüftechnik | Zweiarmrobotersystem_UR10_in_RoboDK.JPG | verweis=Robotik und Automatisierung|Robotik und Automatisierung | ||
Prüfstand PinOnDisc aus CAD.JPG | verweis=Tribologieprüftechnik|Tribologieprüftechnik | |||
CNC_Maschine_nach_Neukonstruktion_gerendert.JPG | verweis=Optimierung der 3D-CNC-Bearbeitungsmaschine|3D-CNC-Bearbeitungsmaschine | CNC_Maschine_nach_Neukonstruktion_gerendert.JPG | verweis=Optimierung der 3D-CNC-Bearbeitungsmaschine|3D-CNC-Bearbeitungsmaschine | ||
Datei:Anlage.png | verweis=Automatische Legostein-Montieranlage|Automatische Legostein-Montieranlage | |||
</gallery> | </gallery> | ||
Forschungsgebiet [[Robotik_und_autonome_Systeme|Robotik und autonome Systeme]] | |||
== | = Studentische Arbeiten = | ||
<gallery mode="packed-overlay"> | == Laufende Arbeiten == | ||
<gallery mode="packed-overlay" heights="150"> | |||
20191108_IRB2400_imLabor.jpg | verweis=Aufbau, Inbetriebnahme und Umsetzung einer ersten Robotikaufgabe| Aufbau + Robotikaufgabe | |||
Projekt_58_Versuchsaufbau_InversesPendel.jpg | verweis=Optimierung des inversen Pendels|Optimierung des inversen Pendels & Regelung | |||
Prüfstand PinOnDisc aus CAD.JPG | verweis=Projekte in der Tribologieprüftechnik|Tribologieprüftechnik | |||
Zweiarmrobotersystem_UR10.jpg | verweis=Projekte mit dem Zweiarm-Robotersystem UR10 von Prof. Göbel|Zweiarm-Robotersystem UR10 | Zweiarmrobotersystem_UR10.jpg | verweis=Projekte mit dem Zweiarm-Robotersystem UR10 von Prof. Göbel|Zweiarm-Robotersystem UR10 | ||
</gallery> | |||
== [[Datei:Ezgif-3-aa149494be25.gif]] Verfügbare Themen für Projekt-/Bachelor-/Masterarbeiten == | |||
<!-- Prof. Göbel vom 09.02.2016: Modus "packed-overlay" funktioniert noch nicht wie auf [https://de.wikipedia.org/wiki/Hilfe:Galerie] beschrieben. --> | |||
<gallery mode="packed-overlay" heights="150"> | |||
<!-- --> | |||
Zweiarmrobotersystem_UR10.jpg | verweis=Projekte mit dem Zweiarm-Robotersystem UR10 von Prof. Göbel|Zweiarm-Robotersystem UR10 | |||
UR3.jpeg | verweis=Robotik-Projekt mit dem UR3| Robotik mit UR3 | |||
<!-- Brennkammer Atlas HVUL2.jpg | verweis=Automatisierte_Brennkammer | Automatisierte Brennkammer --> | |||
<!-- Sammy-robot-1519210.jpg | verweis=Schlülermotivationsprojekt für Mechatronik|Konzept/Entwicklung eines Mechatronik-Schüler-Motivations-Projekts --> | |||
<!-- Ballbalancierer1.png | verweis=Optimierung des Ballbalancierers|Optimierung des Ballbalancierers & Regelung --> | |||
<!-- Wuerfel.jpg | verweis=Vollendung eines LED-Würfels|Vollendung eines LED-Würfels --> | |||
<!-- LEDTisch Por19.jpg | verweis=Fertigstellung_und_Verfeinerung_des_interaktiven_LED-Tisches |Fertigstellung des interaktiven LED-Tisches --> | |||
<!-- DSC 0007.JPG | verweis=Weiterentwicklung_Schwebende_Kugel_Nachbau |Fertigstellung/Verfeinerung/Neuentwicklung der schwebenden Weltkugel --> | |||
<!-- Ventilator.jpg | verweis=Entwicklung einer aktiven Wohnraumlüftung |Entwicklung einer aktiven Wohnraumlüftung --> | |||
<!-- CNC_Maschine_nach_Neukonstruktion_gerendert.JPG | verweis=Optimierung der 3D-CNC-Bearbeitungsmaschine|3D-CNC-Bearbeitungsmaschine --> | |||
LittleArmBig.JPG | verweis=Realisierung_des_"LittleArm"-Roboters_und_Anwendung_mittels_Kinect-Gestenerkennung|Realisierung des "LittleArm"-Roboters und Anwendung mittels Kinect-Gestenerkennung | |||
<!-- Sortierbox.jpg | verweis=Konzeption_und_Entwicklung_eines_Mikrocontroller_Anwendungsbaukastens |Mikrocontroller-Anwendungsbaukasten für Schulen --> | |||
DerRegelkreis.JPG | verweis=Regelungstechnik_mit_Tischaufbauten |Einfache Regelungstechnik-Beispiele | |||
<!-- 20191108_IRB1400-Duo_imLabor.jpg | verweis=Aufbau_der_Sicherheitstechnik_und_Inbetriebnahme_ABB_Industrieroboter |Aufbau ABB Roboter --> | |||
Siemens_SPS_open_Controller.jpg | verweis=Regelungstechnik_Temperaturregelung_per_SiemensSPS |Regelung per Siemens-SPS | |||
SPS_von_Phoenix_Contact.JPG | verweis=Regelungstechnik_Temperaturregelung_per_PHOENIXCONTACT-SPS |Regelung per PHOENIXCONTACT-SPS | |||
</gallery> | </gallery> | ||
<!-- | |||
== Laufende studentische Arbeiten == | |||
Es laufen zahlreiche studentische Arbeiten, von denen hier einige beispielhaft gezeigt sind: | |||
<gallery mode="packed-overlay"> | |||
Projekt_58_Versuchsaufbau_InversesPendel.jpg | verweis=Optimierung des inversen Pendels|Optimierung des inversen Pendels & Regelung | |||
</gallery> | |||
--> | |||
== Hinweise für von mir betreute Studierende == | == Hinweise für von mir betreute Studierende == | ||
* [[Betreuungsgrundsatz_für_studentische_Arbeiten_bei_Prof._Göbel|Betreuungsgrundsatz für studentische Arbeiten bei Prof. Göbel]] | * [[Betreuungsgrundsatz_für_studentische_Arbeiten_bei_Prof._Göbel|Betreuungsgrundsatz für studentische Arbeiten bei Prof. Göbel]] | ||
* [[ArduMower:_Simulation_der_Kinematik_eines_Fahrzeugs_mit_drei_Rädern|Beispielartikel zum Arbeiten nach dem V-Modell]] | |||
= Abgeschlossene Projekte = | |||
* Roboter | |||
** SS2017 [[Gestengesteuerte Fernbedienung eines UR10-Roboters]] | |||
** WS2017 Konzeption eines Roboter-Gestells. | |||
* WS2017: Prüftechnik zum allgemeinen Ansteuern von mechatronischen Maschinen [[Mess-_und_Steuerungssystem_auf_Arduino-Basis]] | |||
* CNC-Bearbeitungsmaschine | |||
** WS2017: [[Ansteuerungsbox_f%C3%BCr_CNC-Maschinen]] | |||
Ein allgemeiner Überblick über studentische Arbeiten findet sich [[Studentische_Arbeiten | hier]]. | |||
= Skripte = | |||
Göbel, Prof. Dr. M.: Fahrwerkmanagement. Version 1.5, 2013, [[Datei:Skript Fahrwerkmanagent ProfGöbel.pdf|hier]] | Göbel, Prof. Dr. M.: Fahrwerkmanagement. Version 1.5, 2013, [[Datei:Skript Fahrwerkmanagent ProfGöbel.pdf|hier]] | ||
= Lieblings-Software-Werkzeuge = | |||
* [http://schinagl.priv.at/nt/hardlinkshellext/hardlinkshellext.html "LinkShellExtension"] zum erstellen symbolischer LInks in Windows. Damit kann z. B. ein Programmordner auf D:\ so verlinkt werden, dass Windows diesen auf C:\Programme findet. | |||
* TortoiseSVN oder überhaupt die Versionierung mit SVN, siehe [[Software_Versionsverwaltung]] | |||
* [https://www.heise.de/ct/artikel/Windows-weitergedacht-ac-tivAid-284115.html ac'tivAid] als Unterstützungswerkzeug in Windows für Verzeichnis-Schnellverknüpfungen, automatische Textbausteine, etc.! | |||
* [http://freecommander.com/de/ubersicht/ FreeCommander] als verbesserter Explorer-Ersatz mit vielen Funktionen wie mehrfacher Dateiumbenennung, Ordnergrößen-Anzeige, Ordner-Lesezeichen,... und der bekannten 2-Spalten-Ansicht für 2 Ordnerfenster nebeneinander (!). | |||
Aktuelle Version vom 28. April 2023, 15:53 Uhr
Prof. Dr. Mirek Göbel Lehrgebiet Regelungstechnik Hochschule Hamm-Lippstadt
Details siehe Link zur HSHL-Webseite
Laufende Projekte
-
 Robotik und Automatisierung
Robotik und Automatisierung -
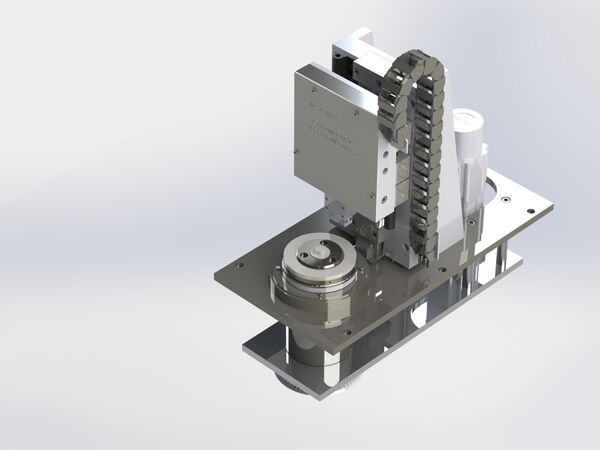 Tribologieprüftechnik
Tribologieprüftechnik -
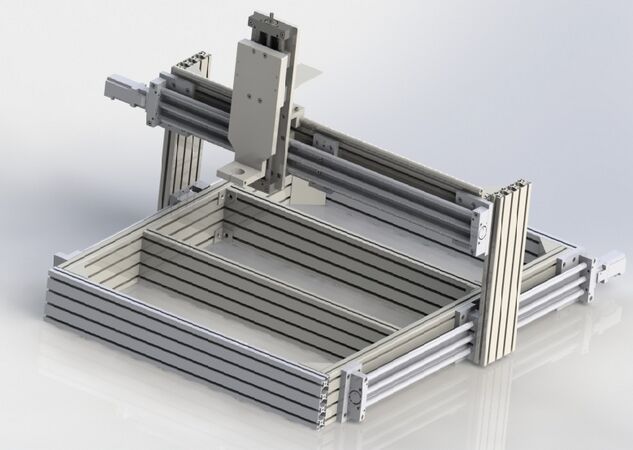 3D-CNC-Bearbeitungsmaschine
3D-CNC-Bearbeitungsmaschine -
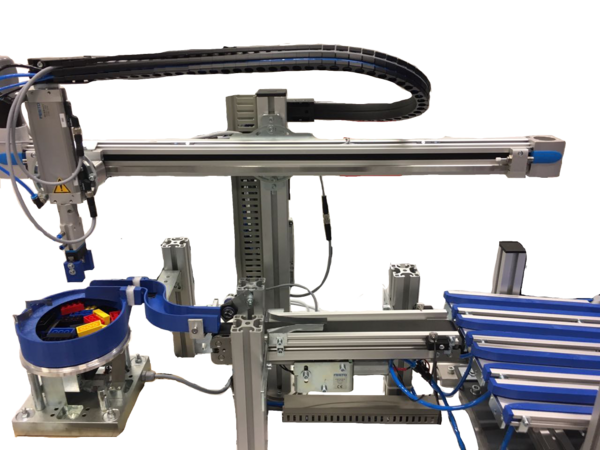 Automatische Legostein-Montieranlage
Automatische Legostein-Montieranlage
Forschungsgebiet Robotik und autonome Systeme
Studentische Arbeiten
Laufende Arbeiten
-
 Aufbau + Robotikaufgabe
Aufbau + Robotikaufgabe -
 Optimierung des inversen Pendels & Regelung
Optimierung des inversen Pendels & Regelung -
 Tribologieprüftechnik
Tribologieprüftechnik -
 Zweiarm-Robotersystem UR10
Zweiarm-Robotersystem UR10
 Verfügbare Themen für Projekt-/Bachelor-/Masterarbeiten
Verfügbare Themen für Projekt-/Bachelor-/Masterarbeiten
-
Zweiarm-Robotersystem UR10
-
 Robotik mit UR3
Robotik mit UR3 -
 Realisierung des "LittleArm"-Roboters und Anwendung mittels Kinect-Gestenerkennung
Realisierung des "LittleArm"-Roboters und Anwendung mittels Kinect-Gestenerkennung -
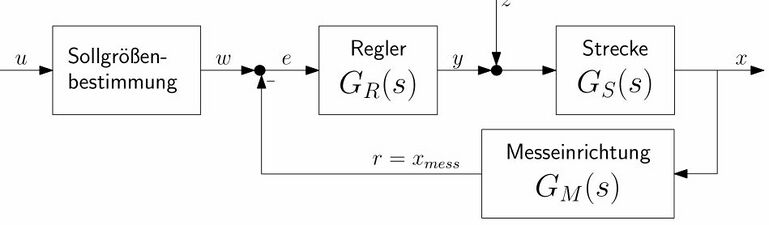 Einfache Regelungstechnik-Beispiele
Einfache Regelungstechnik-Beispiele -
 Regelung per Siemens-SPS
Regelung per Siemens-SPS -
 Regelung per PHOENIXCONTACT-SPS
Regelung per PHOENIXCONTACT-SPS
Hinweise für von mir betreute Studierende
- Betreuungsgrundsatz für studentische Arbeiten bei Prof. Göbel
- Beispielartikel zum Arbeiten nach dem V-Modell
Abgeschlossene Projekte
- Roboter
- SS2017 Gestengesteuerte Fernbedienung eines UR10-Roboters
- WS2017 Konzeption eines Roboter-Gestells.
- WS2017: Prüftechnik zum allgemeinen Ansteuern von mechatronischen Maschinen Mess-_und_Steuerungssystem_auf_Arduino-Basis
- CNC-Bearbeitungsmaschine
Ein allgemeiner Überblick über studentische Arbeiten findet sich hier.
Skripte
Göbel, Prof. Dr. M.: Fahrwerkmanagement. Version 1.5, 2013, Datei:Skript Fahrwerkmanagent ProfGöbel.pdf
Lieblings-Software-Werkzeuge
- "LinkShellExtension" zum erstellen symbolischer LInks in Windows. Damit kann z. B. ein Programmordner auf D:\ so verlinkt werden, dass Windows diesen auf C:\Programme findet.
- TortoiseSVN oder überhaupt die Versionierung mit SVN, siehe Software_Versionsverwaltung
- ac'tivAid als Unterstützungswerkzeug in Windows für Verzeichnis-Schnellverknüpfungen, automatische Textbausteine, etc.!
- FreeCommander als verbesserter Explorer-Ersatz mit vielen Funktionen wie mehrfacher Dateiumbenennung, Ordnergrößen-Anzeige, Ordner-Lesezeichen,... und der bekannten 2-Spalten-Ansicht für 2 Ordnerfenster nebeneinander (!).