Workshop 2 - SenGier/SabGier - Gruppe 3 - SoSe2024: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (58 dazwischenliegende Versionen von 3 Benutzern werden nicht angezeigt) | |||
| Zeile 3: | Zeile 3: | ||
== Messkette == | == Messkette == | ||
== | <gallery widths="740" heights="440"> | ||
[[Datei: | Datei:Messkette von SenFernb - Fernbedienung 2024.png|700px|Abbildung 1: Messkette-Fernbedienung | ||
[[Datei: | </gallery> | ||
== Primärsensor - SenFernb == | |||
[[Datei:Fernbedienung Wagen weiß.png|thumb|280px|Abbidung 1. Der Anschluss des Empfänger der Ferbedienung]] | |||
[[Datei:SEN_ausg.jpg|thumb|280px|Abbildung 2. SEN_ausg]] | |||
Das von der Fernbedienung empfangene Signal wird in diesem Simulink Modul SenFernb-block verarbeitet,das im Abb.1 mit einem roten Rahmen makiert ist. Durch die Darstellung in Simulink ist das zu erkennen,dass das von dSpace empfangene Signal direkt an den Sensorblock gesendet wird. | Das von der Fernbedienung empfangene Signal wird in diesem Simulink Modul SenFernb-block verarbeitet,das im Abb.1 mit einem roten Rahmen makiert ist. Durch die Darstellung in Simulink ist das zu erkennen,dass das von dSpace empfangene Signal direkt an den Sensorblock gesendet wird. | ||
Im diese SenFernb Block werden das Signal von Fernbedienung im 2 Teile der Lenkwinkel- und Gaspedal-Signal jeweils verarbeitet. | |||
Das Eingangssignal SenRti_PwmBreiteLw_f64 ist ein Pulsweitenmoduliertes Signal, was mit einer Frequenz 50 Hz und PT1 Filter gefiltert wird. Das gefilterte Signal wird durch den Look up Funktion in einen Winkel zuordnet, und durch Ausgang 11 geschickt. Und das gefilterte Signal würde auch durch Ausgang 1 direkt in AKT-Block geschickt.Das gefilterte Signal wird auch durch den Checks_Drange Block geleitet und mit SenFernbR_LwEingriff_maxPulsweite_f64h und SenFernbR_LwEingriff_minPulsweite_f64h verglichen, um zu überprüfen, ob es sich innerhalb des angegebenen Bereichs befindet. Das überprüfte Signal wird SenFernb_CheckLw_bit genannt und wird über den Ausgang 8 an das AKT-Modul ausgegeben. | |||
Das Eingangssignal SenRti_PwmBreiteGas_f64 ist auch ein Pulsweitenmoduliertes Signal und übermittelt die Gaspedalstellung von Fernbedienung. Es wurde direkt in Ausgang 10 geschickt und als Filterungssignal in AKT-Block geschickt.Das Signal SenRti_PwmBreiteGas_f64 wird ebenfalls durch den "Checks_Drange" Block geleitet und mit SenFernbR_GasEingriff_maxPulsweite_f64h und SenFernbR_GasEingriff_minPulsweite_f64h verglichen, um zu überprüfen, ob es sich innerhalb des angegebenen Bereichs befindet. Das überprüfte Signal wird SenFernb_Gas_bit genannt und wird über den Ausgang 5 an das AKT-Modul ausgegeben. | |||
Das Signal SenRti_PwmFLw_f64 ist ein Frequenzmodulationssignal. Es wird durch einen Verstärkungsblock mit einem Verstärkungsfaktor von 1 geleitet und über den Ausgang 12 an das AKT-Modul ausgegeben. Es wird auch durch den Checks_Srange Block geleitet und nach Überprüfung, ob es sich im angegebenen Bereich befindet, wird das überprüfte Signal SenFernb_CheckFreqLw_bit genannt und über den Ausgang 9 an das AKT-Modul ausgegeben. | |||
Das Signal SenRti_PwmFGas_f64 ist ebenfalls ein Frequenzmodulationssignal. Es wird durch einen Verstärkungsblock mit einem Verstärkungsfaktor von 1 geleitet und über den Ausgang 7 an das AKT-Modul ausgegeben. Es wird auch durch den Checks_Srange Block geleitet und nach Überprüfung, ob es sich im angegebenen Bereich befindet, wird das überprüfte Signal SenFernb_Freq_bit genannt und über den Ausgang 6 an das AKT-Modul ausgegeben. | |||
SenFernb_CheckLw_bit-Signal und SenFernb_CheckFreqLw_bit-Signal werden gemeinsam durch einen NAND-Logikblock geleitet, um das SenFernb_LwFernbEin_bit-Signal zu bilden, das dann über den Ausgang 2 zum AKT-Modul ausgegeben wird. | |||
SenFernb_Gas_bit-Signal und SenFernb_Freq_bit-Signal werden gemeinsam durch einen NAND-Logikblock geleitet, um das SenFernb_GasFernbEin_bit-Signal zu bilden, das dann über den Ausgang 3 zum AKT-Modul ausgegeben wird. | |||
<gallery widths="320" heights="180"> | |||
Datei:SenFernb - Fernbedienung SS2024.png|600px|Abbildung 3: SenFernb - Fernbedienung | |||
</gallery> | |||
=== Referenz === | |||
[[AF: Fernbedienung (SenFernb)]] | |||
==Aufgabe 2.3: Messung am Fahrzeug == | |||
[[Datei:Einbau der Gierrate.png|thumb|right|450px|Abbildung 3. Einbau von Gierratesensor]] | |||
Im diese Aufgabe haben wir mit den Fahrzeug_weiß(Wagen_2) den Messung gemacht. Auf den Wagen_2 wurde ein LPY530AL Gyro verbaut. | |||
Es befindet sich auf einer Adapterplatine von der Firma Sparkfun verbaut, und kann der Unterschied LPY530AL 300°/s sein. | |||
[[Datei:SenGier 1.5.2024.png|thumb|right|600px|Abbildung 4. Simulink Model der SenGier - Gierrate]] | |||
[[Datei:SabGier 1.5.2024.png|thumb|right|600px|Abbildung 5. Simulink Model der SabGier - Gierrate]] | |||
{| class="wikitable" | |||
|+ I/O der SenGier - Gierrate in Online Modul | |||
|- | |||
! Eingänge !! Ausgänge | |||
|- | |||
| SenGier_psip_roh_ADC_f64|| SenGier_psip_roh_K_f64 | |||
|- | |||
| SenGier_psip_OffsetSensorrohwert_f64 || | |||
|} | |||
{| class="wikitable" | |||
|+ I/O der SAB - Signalaufbereitung in Online Modul | |||
|- | |||
! Eingänge !! Ausgänge | |||
|- | |||
| SenGier_psip_roh_K_f64 || SabGier_psip_filt_K_f64 | |||
|- | |||
| SenTast_AEP_bit || SabGier_psi_filt_K_f64 | |||
|- | |||
| SenTast_BSF_Rundk_bit || SabGier_psip_unfilt_K_f64 | |||
|- | |||
| SenTast_BSF_RundkHindernis_bit || SabGier_psip_offset_K_f64 | |||
|- | |||
| SenGier_psip_roh_K_f64 || SabGier_Reset_bit | |||
|- | |||
| SenTast_Reset_bit|| | |||
|} | |||
{| class="wikitable" | |||
|+ Messtabelle | |||
|- | |||
! Nr. !! Lenkwinkel !! Vx !! Zeit in s | |||
|- | |||
| 1 || +20° (Links) || 0,6 | |||
|| 14.02<br>13.72<br>13.46<br>13.74<br>13.59 | |||
|- | |||
| 2 || -5° (Rechts) || 0,6 || 13.55<br>14.19<br>14.13<br>14.34<br>14,24 | |||
|} | |||
'''SVN-Ordner:''' <code>https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Daten/Gierrate/Gruppe3/</code> | |||
Das Signal der Lenkwinkel werden durch Eingang ''SenGier_psip_roh_ADC_f64'' in Simulink SenGier - Gierrate von dSPACE RT1104 eingelest. Durch die Umwandlungsmodell wird die Einheit des Lenkwinkels von Degree in Rad umgewandelt, und durch den Ausgang ''SenGier_psip_roh_K_f64'' in den Simulink SabGier - Gierrate geschickt. | |||
Das Rohwert der Offsetsensor werden durch Eingang ''SenGier_psip_OffsetSensorrohwert_f64'' von dSPACE RT1104 eingelest. | |||
== Aufgabe 2.4: Darstellung der Messergebnisse == | |||
=== Still === | |||
Test beginnen und dann die Reset-Taste zur Kalibrierung drücken | |||
[[Datei:SenTast Reset bit neu.png|thumb|left|600px|Abb. SenGier - Gierrate Rechtsfahrt]] | |||
Wie aus Abbildung 8 deutlich zu erkennen ist, zeigt die ungefilterte Gierrate deutliche Oszillationen, während das gefilterte Signal wesentlich stabiler ist. | |||
[[Datei:Gierrate filt ,unfilt und Gierwinkel signal2.png|thumb|left|600px|Abb.8 Gierrate filt ,unfilt und Gierwinkel signal]] | |||
Der Gierraten-Offset beträgt vor Kalibrierung: 0.8 Grad/s | |||
Durch Abbildung 10 kann klar erkannt werden,Der Gierraten-Offset beträgt nach Kalibrierung: 0Grad/s Die Offsetkalibrierung war erfolgreich,Und die Drift entspricht ungefähr der Steigung des Signals SabGier_psip_filt_K_f64. | |||
Durch Berechnungen mit MATLAB,Der Drift beträgt -2.078 Grad/s | |||
[[Datei:Gierrate_zeit.png|thumb|left|600px|Abb.9 Gierrate_zeit]] | |||
[[Datei:Gierwinkel_zeit.png|thumb|right|600px|Abb.10 Gierwinkel_zeit]] | |||
[[Datei:wert_.png|thumb|left|600px|Abb. Gierrate_zeit]] | |||
=== Linkfahrt === | |||
[[Datei:SenGier - Gierrate Linksfahrt.png|thumb|right|600px|Abb. SenGier - Gierrate Linksfahrt]] | |||
In den Linksfahrt haben wir ein Lenkswinkel mit 7 Grad und Geschwindigkeit 0.8 im Controldesk eingestellt, und danach fuhr das Auto mit den eingegebene Parameter eine Reihe von Kreisen nach links und die Werte der Signale von Ein- und Ausgänge der SimulinkModel SenGier - Gierrate und SabGier - Gierrate würden durch Controldesk separat aufgezeichnet. | |||
Durch den SenGier_psip_roh_ADC_f64 wurde den Werte von SenGier_psip_roh_ADC_f64 gezeigt, dass den Anzahl immer um 0.128 herum schwankt. Da die Einheit der Lenkwinkelparameter, die in das Fahrzeug eingegeben werden, in Grad sind, muss dieser Wert in Simulink durch eine Umrechnung von Grad in Radiant transformiert werden. Dadurch erhält man einen neuen Eingabewert für den Lenkwinkel wie den Kurve im Abb. SenGier_Psip_roh_K_f64, der in Radiant gemessen wird. Und danach wurde es durch den Ausgang der SenGier_psip_roh_K_f64 in den Simulink Model SabGier - Gierrate geschickt. | |||
<gallery widths="280" heights="180"> | |||
Datei:Psip roh ADC.png|Abb. SenGier_psip_roh_ADC_f64 Linksfahrt | |||
Datei:Psip roh K.png|Abb. SenGier_Psip_roh_K_f64 Linksfahrt | |||
Datei:OffsetSensorrohwert neu.png|Abb. SenGier_psip_offsetSensorrohwert Linksfahrt | |||
</gallery> | |||
Danach wird die Signal durch Eingang SenGier_psip_roh_K_f64 in Simulink SabGier - Gierrate geschickt. Dieses Eingangssignal wird zunächst als Eingangssignal an das Berechnungsmodul Offsetberechnung gesendet. und Anschließend führt dieses Signal eine Summenoperation mit dem Ausgangssignal ADC_eing_Offset von Offsetberechnung Moduls durch. Die Berechnungsergebnis wurde danach mit den Ausgangsignal von Multiport Switch multipliziert. Dieses multiplizierten Ergebnis kann durch den PT-1 Filter gefiltert und als gefilterten Dreheschwindigkeit über den Ausgang SabGier_psip_filt_K_f64 ausschicken. Im Abb. SabGier_psip Vergleich kann Sehen, die Werte nach PT-1 Filter ist stabiler als ungefilterte Signal und schwänkt nicht so stark. | |||
Die Signal wird auch in Model Intergration der Geschwindigkeit mit Formel KTsZ/Z-1 integriert und der Gierratewinkel wird als Ergebnis der Operation erhalten und als Ausgangssignal über den Ausgang SabGier_psi_filt_K_f64 ausgegeben. Wegen der Lauf des Kreisfahrenes des Fahrzeug immer an Richtung Links, werden der Gierrate Winkel auch immer größer. | |||
<gallery widths="340" heights="240"> | |||
Datei:Vergleich mit Referenz links.png|Abb. SabGier_psi_filt_deg und Referenz Linksfahrt | |||
Datei:Pisp filt und psip unfilt und Referenz.png|Abb. SenGier_psip und Referenz Linksfahrt | |||
</gallery> | |||
=== Rechtfahrt === | |||
[[Datei:SenGier - Gierrate Rechtsfahrt.png|thumb|right|600px|Abb. SenGier - Gierrate Rechtsfahrt]] | |||
Im Rechtsfahrt haben wir auch mit den Geschwindigkeit 0.8 im Controldesk eingestellt jedoch mit den Lenkswinkel -7 Grad, was absolut Gegenteil von den Linksfahrt ist. Daher haben wir auch ein Rohrwert der Drehgeschwindigkeit bekommen, was wird auch durch Eingang SenGier_psip_roh_ADC_f64 in den Simulink Model SenGier - Gierrate eingegeben. und durch die gleichen Unwandlung wie im Linksfahrt wird die Einheit der Lenkswinkel von Degree in Rad umrechnet, und die Signal wird über den Ausgang SenGier_psip_roh_K_f64 ausgegeben. Die Ploten der Messdaten zeigt darunter. | |||
<gallery widths="280" heights="180"> | |||
Datei:SenGier psip roh ADC.png|Abb. SenGier_psip_roh_ADC_f64 Rechtsfahrt | |||
Datei:SenGier Psip roh K.png||Abb. SenGier_psip_roh_k_f64 Rechtsfahrt | |||
Datei:OffsetSensorrohwert.png||Abb. SenGier_psip_offsetsensorrohwert Rechtsfahrt | |||
</gallery> | |||
Das Signal wird über Eingang SenGier_psip_roh_K_f64 in den SabGier - Gierrate geschickt, und er wird die gleichen Operationen wiederholen, die er zuvor bei Linksfahrt durchgeführt hat. Das Signal von SenGier Model wird anschliesslich durch den PT-1 Filter gefiltert, und als Drehgeschwindigkeit über Ausgang SabGier_psip_filt_K_f64 ausgegeben. gleichzeitig wird es durch den Simulink Model Integration der Geschwindigkeit integriert. und das berechnende Ergebnis wird als Gierratewinkel ausgeben. Aufgrund der entgegengesetzten Fahrtrichtung, ist das Trendenz der Veränderung des Gierratewinkels auch duruch die entgegegesetzten Richtung. | |||
In den Abb.SenGier_psip_roh_k_f64 und Referenz Rechtsfahrt wurden den Signal SenGier_psip_filt_K_f64 und SenGier_psip_unfilt_K_f64 jeweils mit den gelbe und blaue Linie gezeigt. den fZeit und fReferenz wurden mit den Orange Linie gezeigt. | |||
<gallery widths="340" heights="240"> | |||
Datei:Vergleich mit Referenz.png|Abb. SabGier_psi_filt_deg und Referenz Rechtsfahrt | |||
Datei:SabGier psip unfilt und filt.png|Abb.SenGier_psip und Referenz Rechtsfahrt | |||
</gallery> | |||
=== Openloop === | |||
<gallery widths="220" heights="120"> | |||
Datei:Open Loop Gierrate Gruppe3.png|Openloop Gierrate Gruppe3 | |||
Datei:Scope SabGier psip Offset.png|Scope SabGier_psip_Offset | |||
Datei:Scope SabGier psip unfilt.png|Scope SabGier_psip_unfilt | |||
Datei:Scope SabGier Reset.png|Scope SabGier_Reset | |||
Datei:Scope Vergleich Still.png|Scope Vergleich_Still | |||
Datei:Scope SabGier psi filt.png|Scope SabGier_psi_filt | |||
Datei:Scope SabGier psip filt.png|Scope SabGier_psip_filt | |||
</gallery> | |||
---- | |||
→ zurück zum Hauptartikel: [[Praktikum_SDE|Praktikum SDE]] | [[SDE-Team 2024/25]] | [[SoSe24_-_Praktikum_Systementwurf_-_Lernzielkontrolle_1|Lernzielkontrolle 1]] | |||
Aktuelle Version vom 9. Mai 2024, 12:36 Uhr
Autoren: Xiangyao Liu & Yuhan Pan & Yunkai Lin
Messkette
-
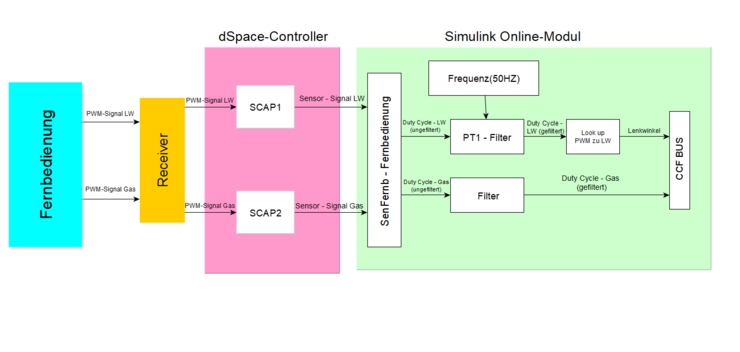
Abbildung 1: Messkette-Fernbedienung

Primärsensor - SenFernb


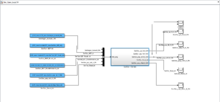
Das von der Fernbedienung empfangene Signal wird in diesem Simulink Modul SenFernb-block verarbeitet,das im Abb.1 mit einem roten Rahmen makiert ist. Durch die Darstellung in Simulink ist das zu erkennen,dass das von dSpace empfangene Signal direkt an den Sensorblock gesendet wird. Im diese SenFernb Block werden das Signal von Fernbedienung im 2 Teile der Lenkwinkel- und Gaspedal-Signal jeweils verarbeitet. Das Eingangssignal SenRti_PwmBreiteLw_f64 ist ein Pulsweitenmoduliertes Signal, was mit einer Frequenz 50 Hz und PT1 Filter gefiltert wird. Das gefilterte Signal wird durch den Look up Funktion in einen Winkel zuordnet, und durch Ausgang 11 geschickt. Und das gefilterte Signal würde auch durch Ausgang 1 direkt in AKT-Block geschickt.Das gefilterte Signal wird auch durch den Checks_Drange Block geleitet und mit SenFernbR_LwEingriff_maxPulsweite_f64h und SenFernbR_LwEingriff_minPulsweite_f64h verglichen, um zu überprüfen, ob es sich innerhalb des angegebenen Bereichs befindet. Das überprüfte Signal wird SenFernb_CheckLw_bit genannt und wird über den Ausgang 8 an das AKT-Modul ausgegeben.
Das Eingangssignal SenRti_PwmBreiteGas_f64 ist auch ein Pulsweitenmoduliertes Signal und übermittelt die Gaspedalstellung von Fernbedienung. Es wurde direkt in Ausgang 10 geschickt und als Filterungssignal in AKT-Block geschickt.Das Signal SenRti_PwmBreiteGas_f64 wird ebenfalls durch den "Checks_Drange" Block geleitet und mit SenFernbR_GasEingriff_maxPulsweite_f64h und SenFernbR_GasEingriff_minPulsweite_f64h verglichen, um zu überprüfen, ob es sich innerhalb des angegebenen Bereichs befindet. Das überprüfte Signal wird SenFernb_Gas_bit genannt und wird über den Ausgang 5 an das AKT-Modul ausgegeben.
Das Signal SenRti_PwmFLw_f64 ist ein Frequenzmodulationssignal. Es wird durch einen Verstärkungsblock mit einem Verstärkungsfaktor von 1 geleitet und über den Ausgang 12 an das AKT-Modul ausgegeben. Es wird auch durch den Checks_Srange Block geleitet und nach Überprüfung, ob es sich im angegebenen Bereich befindet, wird das überprüfte Signal SenFernb_CheckFreqLw_bit genannt und über den Ausgang 9 an das AKT-Modul ausgegeben.
Das Signal SenRti_PwmFGas_f64 ist ebenfalls ein Frequenzmodulationssignal. Es wird durch einen Verstärkungsblock mit einem Verstärkungsfaktor von 1 geleitet und über den Ausgang 7 an das AKT-Modul ausgegeben. Es wird auch durch den Checks_Srange Block geleitet und nach Überprüfung, ob es sich im angegebenen Bereich befindet, wird das überprüfte Signal SenFernb_Freq_bit genannt und über den Ausgang 6 an das AKT-Modul ausgegeben.
SenFernb_CheckLw_bit-Signal und SenFernb_CheckFreqLw_bit-Signal werden gemeinsam durch einen NAND-Logikblock geleitet, um das SenFernb_LwFernbEin_bit-Signal zu bilden, das dann über den Ausgang 2 zum AKT-Modul ausgegeben wird.
SenFernb_Gas_bit-Signal und SenFernb_Freq_bit-Signal werden gemeinsam durch einen NAND-Logikblock geleitet, um das SenFernb_GasFernbEin_bit-Signal zu bilden, das dann über den Ausgang 3 zum AKT-Modul ausgegeben wird.
-
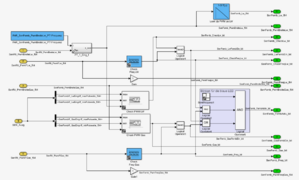
Abbildung 3: SenFernb - Fernbedienung

Referenz
Aufgabe 2.3: Messung am Fahrzeug

Im diese Aufgabe haben wir mit den Fahrzeug_weiß(Wagen_2) den Messung gemacht. Auf den Wagen_2 wurde ein LPY530AL Gyro verbaut.
Es befindet sich auf einer Adapterplatine von der Firma Sparkfun verbaut, und kann der Unterschied LPY530AL 300°/s sein.


| Eingänge | Ausgänge |
|---|---|
| SenGier_psip_roh_ADC_f64 | SenGier_psip_roh_K_f64 |
| SenGier_psip_OffsetSensorrohwert_f64 |
| Eingänge | Ausgänge |
|---|---|
| SenGier_psip_roh_K_f64 | SabGier_psip_filt_K_f64 |
| SenTast_AEP_bit | SabGier_psi_filt_K_f64 |
| SenTast_BSF_Rundk_bit | SabGier_psip_unfilt_K_f64 |
| SenTast_BSF_RundkHindernis_bit | SabGier_psip_offset_K_f64 |
| SenGier_psip_roh_K_f64 | SabGier_Reset_bit |
| SenTast_Reset_bit |
| Nr. | Lenkwinkel | Vx | Zeit in s |
|---|---|---|---|
| 1 | +20° (Links) | 0,6 | 14.02 13.72 13.46 13.74 13.59 |
| 2 | -5° (Rechts) | 0,6 | 13.55 14.19 14.13 14.34 14,24 |
SVN-Ordner: https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Daten/Gierrate/Gruppe3/
Das Signal der Lenkwinkel werden durch Eingang SenGier_psip_roh_ADC_f64 in Simulink SenGier - Gierrate von dSPACE RT1104 eingelest. Durch die Umwandlungsmodell wird die Einheit des Lenkwinkels von Degree in Rad umgewandelt, und durch den Ausgang SenGier_psip_roh_K_f64 in den Simulink SabGier - Gierrate geschickt. Das Rohwert der Offsetsensor werden durch Eingang SenGier_psip_OffsetSensorrohwert_f64 von dSPACE RT1104 eingelest.
Aufgabe 2.4: Darstellung der Messergebnisse
Still
Test beginnen und dann die Reset-Taste zur Kalibrierung drücken

Wie aus Abbildung 8 deutlich zu erkennen ist, zeigt die ungefilterte Gierrate deutliche Oszillationen, während das gefilterte Signal wesentlich stabiler ist.

Der Gierraten-Offset beträgt vor Kalibrierung: 0.8 Grad/s
Durch Abbildung 10 kann klar erkannt werden,Der Gierraten-Offset beträgt nach Kalibrierung: 0Grad/s Die Offsetkalibrierung war erfolgreich,Und die Drift entspricht ungefähr der Steigung des Signals SabGier_psip_filt_K_f64.
Durch Berechnungen mit MATLAB,Der Drift beträgt -2.078 Grad/s



Linkfahrt

In den Linksfahrt haben wir ein Lenkswinkel mit 7 Grad und Geschwindigkeit 0.8 im Controldesk eingestellt, und danach fuhr das Auto mit den eingegebene Parameter eine Reihe von Kreisen nach links und die Werte der Signale von Ein- und Ausgänge der SimulinkModel SenGier - Gierrate und SabGier - Gierrate würden durch Controldesk separat aufgezeichnet.
Durch den SenGier_psip_roh_ADC_f64 wurde den Werte von SenGier_psip_roh_ADC_f64 gezeigt, dass den Anzahl immer um 0.128 herum schwankt. Da die Einheit der Lenkwinkelparameter, die in das Fahrzeug eingegeben werden, in Grad sind, muss dieser Wert in Simulink durch eine Umrechnung von Grad in Radiant transformiert werden. Dadurch erhält man einen neuen Eingabewert für den Lenkwinkel wie den Kurve im Abb. SenGier_Psip_roh_K_f64, der in Radiant gemessen wird. Und danach wurde es durch den Ausgang der SenGier_psip_roh_K_f64 in den Simulink Model SabGier - Gierrate geschickt.
-
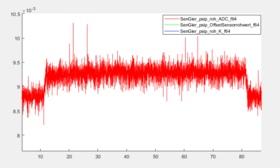
Abb. SenGier_psip_roh_ADC_f64 Linksfahrt
-
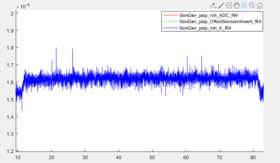
Abb. SenGier_Psip_roh_K_f64 Linksfahrt
-
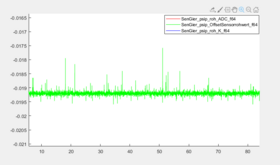
Abb. SenGier_psip_offsetSensorrohwert Linksfahrt



Danach wird die Signal durch Eingang SenGier_psip_roh_K_f64 in Simulink SabGier - Gierrate geschickt. Dieses Eingangssignal wird zunächst als Eingangssignal an das Berechnungsmodul Offsetberechnung gesendet. und Anschließend führt dieses Signal eine Summenoperation mit dem Ausgangssignal ADC_eing_Offset von Offsetberechnung Moduls durch. Die Berechnungsergebnis wurde danach mit den Ausgangsignal von Multiport Switch multipliziert. Dieses multiplizierten Ergebnis kann durch den PT-1 Filter gefiltert und als gefilterten Dreheschwindigkeit über den Ausgang SabGier_psip_filt_K_f64 ausschicken. Im Abb. SabGier_psip Vergleich kann Sehen, die Werte nach PT-1 Filter ist stabiler als ungefilterte Signal und schwänkt nicht so stark.
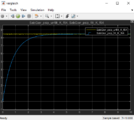
Die Signal wird auch in Model Intergration der Geschwindigkeit mit Formel KTsZ/Z-1 integriert und der Gierratewinkel wird als Ergebnis der Operation erhalten und als Ausgangssignal über den Ausgang SabGier_psi_filt_K_f64 ausgegeben. Wegen der Lauf des Kreisfahrenes des Fahrzeug immer an Richtung Links, werden der Gierrate Winkel auch immer größer.
-
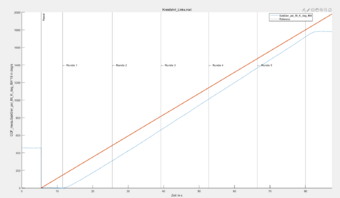
Abb. SabGier_psi_filt_deg und Referenz Linksfahrt
-
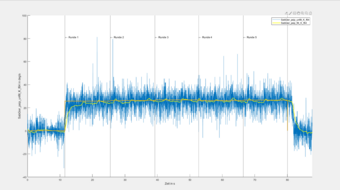
Abb. SenGier_psip und Referenz Linksfahrt


Rechtfahrt

Im Rechtsfahrt haben wir auch mit den Geschwindigkeit 0.8 im Controldesk eingestellt jedoch mit den Lenkswinkel -7 Grad, was absolut Gegenteil von den Linksfahrt ist. Daher haben wir auch ein Rohrwert der Drehgeschwindigkeit bekommen, was wird auch durch Eingang SenGier_psip_roh_ADC_f64 in den Simulink Model SenGier - Gierrate eingegeben. und durch die gleichen Unwandlung wie im Linksfahrt wird die Einheit der Lenkswinkel von Degree in Rad umrechnet, und die Signal wird über den Ausgang SenGier_psip_roh_K_f64 ausgegeben. Die Ploten der Messdaten zeigt darunter.
-
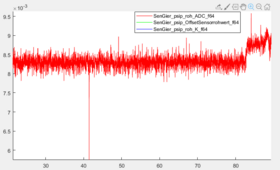
Abb. SenGier_psip_roh_ADC_f64 Rechtsfahrt
-
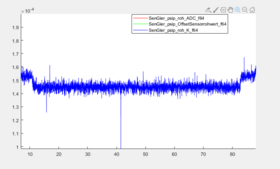
Abb. SenGier_psip_roh_k_f64 Rechtsfahrt
-
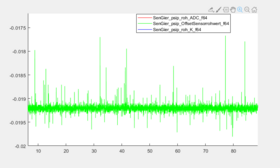
Abb. SenGier_psip_offsetsensorrohwert Rechtsfahrt



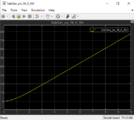
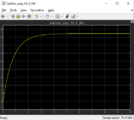
Das Signal wird über Eingang SenGier_psip_roh_K_f64 in den SabGier - Gierrate geschickt, und er wird die gleichen Operationen wiederholen, die er zuvor bei Linksfahrt durchgeführt hat. Das Signal von SenGier Model wird anschliesslich durch den PT-1 Filter gefiltert, und als Drehgeschwindigkeit über Ausgang SabGier_psip_filt_K_f64 ausgegeben. gleichzeitig wird es durch den Simulink Model Integration der Geschwindigkeit integriert. und das berechnende Ergebnis wird als Gierratewinkel ausgeben. Aufgrund der entgegengesetzten Fahrtrichtung, ist das Trendenz der Veränderung des Gierratewinkels auch duruch die entgegegesetzten Richtung.
In den Abb.SenGier_psip_roh_k_f64 und Referenz Rechtsfahrt wurden den Signal SenGier_psip_filt_K_f64 und SenGier_psip_unfilt_K_f64 jeweils mit den gelbe und blaue Linie gezeigt. den fZeit und fReferenz wurden mit den Orange Linie gezeigt.
-
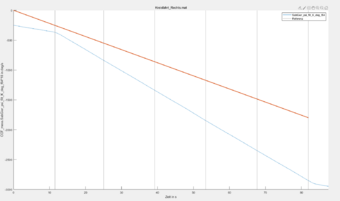
Abb. SabGier_psi_filt_deg und Referenz Rechtsfahrt
-
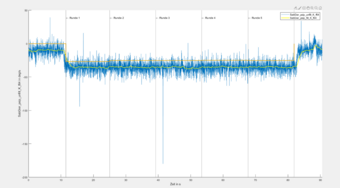
Abb.SenGier_psip und Referenz Rechtsfahrt


Openloop
-
Openloop Gierrate Gruppe3
-
Scope SabGier_psip_Offset
-
Scope SabGier_psip_unfilt
-
Scope SabGier_Reset
-
Scope Vergleich_Still
-
Scope SabGier_psi_filt
-
Scope SabGier_psip_filt







→ zurück zum Hauptartikel: Praktikum SDE | SDE-Team 2024/25 | Lernzielkontrolle 1