Stopplinienerkennung mit Hough-Transformation
Autor: Kevin Hustedt, Moritz Oberg
Einleitung
Im Praktikum des Studienschwerpunkts Systems Designe Engineering des Studiengangs Mechatronik, wird ein autonom fahrendes Modellauto entwickelt. Dieses Auto soll auf einem Rundkurs fahren, der unteranderem Kreuzungen mit Stopplinien beinhaltet. Das Auto soll automatisch an diesen Stopplinien halten. Für das Stoppen muss das Auto die Stopplinien über die eingebaute Kamera erkennen und den Abstand fortlaufend berechnen. Dies geht aus dem Lastenheft des Praktikums hervor (vgl. Abb. 1).
Lastenheft
-
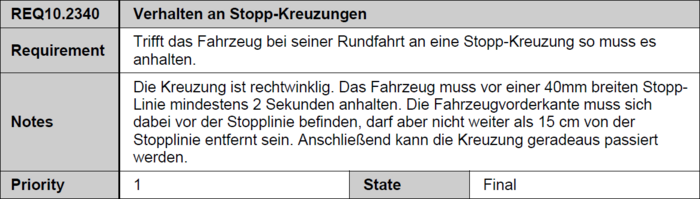
Abbildung 1: REQ.10.2340 Verhalten an Stopp-Kreuzungen

Pflichtenheft
Programmablaufplan
-
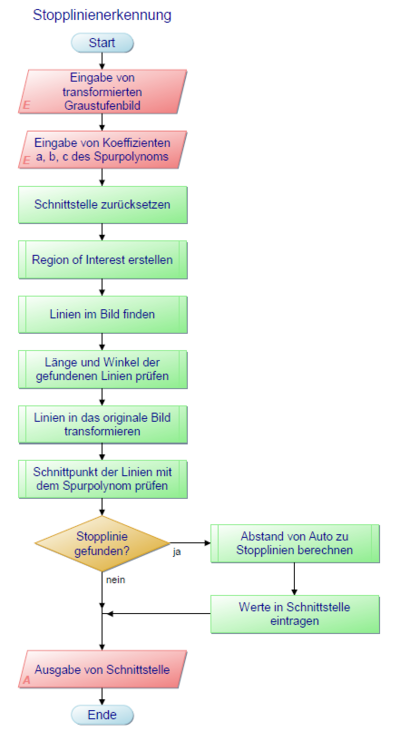
Abbildung 3: Programmablaufplan der Stopplinienerkennung
-
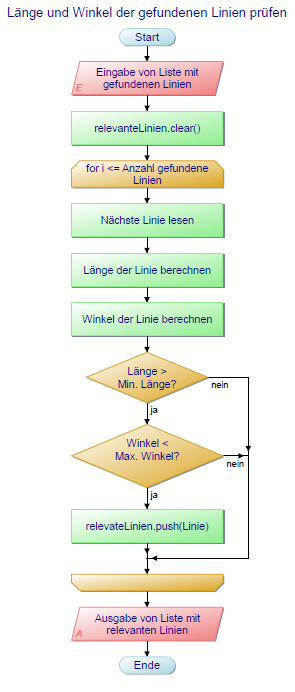
Abbildung 4: Unterprogramm zum Überprüfen der Länge und des Winkels
-
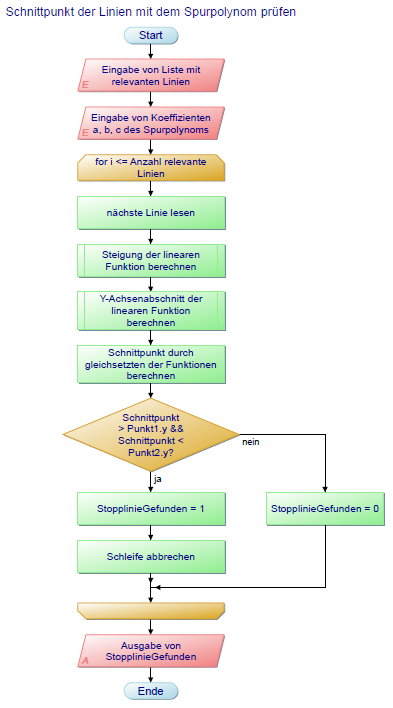
Abbildung 5: Unterprogramm zum Überprüfen des Schnittpunktes



Programm
Die Stopplinienerkennung wurde in der Programmiersprache C/C++ umgesetzt. Als Entwicklungsumgebung diente Visual Studio 2019. Es wurden Funktionen und Datentypen aus der Programmbibliothek OpenCV verwendet. Die Bibliothek muss für die Verwendung in die Entwicklungsumgebung Visual Studio eingebunden werden, eine ausführliche Anleitung für das Einbinden ist hier zu finden: Einrichten von OpenCV
Programmablauf
Der Programmablauf der Stopplinienerkennung ist in Abbildung 3 zu sehen. Auf dem Auto wird in regelmäßigen Schritten ein neues Bild mit der Kamera aufgenommen. Im folgenden werden die einzelnen Schritte des Programmablaufes beschrieben.
1. Eingabe
Das Bild der Kamera (vgl. Abb. 6) wird zunächst in der Bildtransformation in ein Graustufenbild gewandelt und in die Vogelperspektive transformiert (vgl. Abb. 7).
-
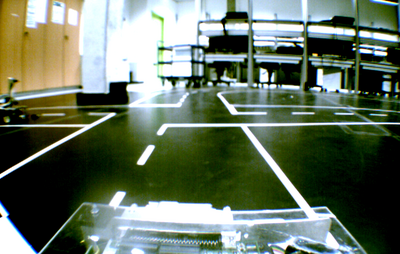
Abbildung 6: Bild von der Kamera vor der Transformation
-

Abbildung 7: Bild nach der Transformation


Danach erfolgt in der Spurerkennung die Berechnung des Spurpolynoms. Das Spurpolynom beschreibt den Verlauf der Fahrbahn in dem aufgenommenen Bild. Das Spurpolynom ist ein Polynom 2. grades und hat folgende Form:
Das in die Vogelperspektive transformierte Bild und die Koeffizienten a, b und c des Spurpolynoms, werden dann der Stopplinienerkennung als Funktionsparameter übergeben.
2. Schnittstelle zurücksetzen
Für die Datenübertragung zwischen PC und dSPACE Karte wurde eine Datenstruktur angelegt. Die Refernez der Datenstruktur wird der Stopplinienerkennung übergeben. Die Datenstruktur beinhaltet unter anderem ein Bit, welches anzeigt das eine Stopplinie erkannt wurde und den Abstand zu der gefundenen Stopplinie. Beide Werte werden zu Beginn eines Programmdurchlaufes zurückgesetzt.
3. Region of Interest erstellen
In Abbildung 7 ist das Bild nach der Transformation zu sehen, welches der Stopplinienerkennung übergeben wird. In dem Bild kann man erkennen, dass nicht das gesamte Bild relevant für die Erkennung einer Stopplinie ist. Aus diesem Grund wird im weiteren Verlauf, nur ein Ausschnitt aus diesem Bild untersucht. Dazu wird mit Hilfe einer Funktion ein Ausschnitt aus dem Bild (Region of Interest) erstellt. Ein weiterer Vorteil ist die Verringerung der Programmdurchlaufzeit, da vom Algorithmus nur ein kleines Bild verarbeitet werden muss. Die Größe des Bildausschnittes kann über Parameter in der Stopplinienerkennung beliebig eingestellt werden.
4. Linien im Bild finden
Im nächsten Schritt werden in dem Bildausschnitt Linien gesucht. Für das Suchen der Linien wird die Hough Line Transformation verwendet. Die Hough Line Tranformation wird verwendet um gerade Linien in einem binären Bild zu finden. In diesem Fall wird die Funktion cv::HoughlineP() aus der Programmbibliothek OpenCV verwendet. Der Funktion wird dazu ein binäres Bild übergeben. Als Rückgabe erhält man eine Liste mit Linien. Die Linien werden durch jeweils 2 Punkte beschrieben, wobei die Punkte in kartesischen Koordinaten angegeben werden.
5. Länge und Winkel der gefundenen Linien prüfen
Um die Anzahl an Linie zu reduzieren, werden die gefundenen Linien hinsichtlich Länge und Winkel untersucht, damit nur Linien weiter verfolgt werden, die die Kriterien einer Stopplinie erfüllen. Dabei fallen zu kurze Linien raus und Linien die zum Beispiel senkrecht zum Fahrzeug stehen. Senkrechte Linien stammen zum Beispiel von einer Fahrbahnmarkierung.
Eine Linie wird mit Hilfe von zwei Punkten beschreiben. Der Winkel einer Linie kann folgendermaßen berechnet werden:
Die Länge einer Linie kann mi der folgenden Formel berechnet werden: