Automatischer Stempel: Unterschied zwischen den Versionen
(Die Seite wurde neu angelegt: „Kategorie:Projekte Kategorie:ProjekteET MTR BSE WS2020 Kategorie:ProjekteET MTR BSE WS2021 Kategorie:ProjekteET MTR BSE WS2022 <!-- Kopieren Sie diesen Header in Ihren Artikel, damit er aufgelistet wird. --> '''Autoren: Dominique Kamdem und Patrick Glinicki''' <br/> '''Betreuer: Prof. Göbel & Prof. Schneider''' <br/> → zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE) == Einl…“) |
|||
| (4 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 38: | Zeile 38: | ||
== Funktionaler Systementwurf/Technischer Systementwurf == | == Funktionaler Systementwurf/Technischer Systementwurf == | ||
<gallery widths=" | <gallery widths="420" heights="350" perrow="3"> | ||
Datei:Funktionaler Systementwurf des Stempels .jpg|Funktionaler Systementwurf | Datei:Funktionaler Systementwurf des Stempels .jpg|Funktionaler Systementwurf | ||
| Zeile 45: | Zeile 45: | ||
Datei:Technischer Systementwurf des Stempels.jpg|Technischer Systementwurf | Datei:Technischer Systementwurf des Stempels.jpg|Technischer Systementwurf | ||
<br> | |||
Datei:Auto Stempel Programm Ablauf Plan.jpg|mini|Programm Ablauf Plan | |||
</gallery> | </gallery> | ||
| Zeile 59: | Zeile 62: | ||
* Fritzing | * Fritzing | ||
entwickelt | entwickelt | ||
<br> | |||
==== Umsetzung des Programms ==== | |||
<div style="width:950px; height:500px; overflow:scroll; border: hidden"> | |||
<syntaxhighlight lang="arduino" style="border: none; background-color: #EFF1C1; font-size:larger"> | |||
//Variablen deklarieren | |||
#include <Stepper.h> | |||
int SPU = 2048; | |||
Stepper Motor(SPU, 3,5,4,6); | |||
const int pinIRd = 8; | |||
const int pinIRa = A0; | |||
const int pinLED = 9; | |||
// IR-Sensor Variablen | |||
int IRvalueA = 0; | |||
int IRvalueD = 0; | |||
void setup() | |||
{ | |||
Serial.begin(9600); | |||
Motor.setSpeed(10); | |||
pinMode(pinIRd,INPUT); | |||
pinMode(pinIRa,INPUT); | |||
pinMode(pinLED,OUTPUT); | |||
} | |||
void loop() | |||
{ | |||
IRvalueA = analogRead(pinIRa); | |||
IRvalueD = digitalRead(pinIRd); | |||
Serial.println(IRvalueA); | |||
if (IRvalueA <= 50) | |||
{ | |||
delay(1); | |||
Motor.step(1000); | |||
delay(2000); | |||
Motor.step(-1000); | |||
delay(100); | |||
} | |||
else | |||
{ | |||
digitalWrite(pinLED, HIGH); | |||
} | |||
} | |||
</syntaxhighlight> | |||
</div> | |||
<br> | <br> | ||
==== Hardware ==== | ==== Hardware ==== | ||
| Zeile 67: | Zeile 119: | ||
* ein TRCT5000 Proximity IR Sensor | * ein TRCT5000 Proximity IR Sensor | ||
* ein Stempelfuß | * ein Stempelfuß | ||
==== Gehäuse ==== | |||
<gallery widths="400" heights="350" perrow="2"> | |||
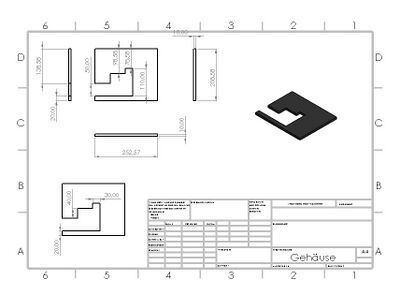
Datei:Gehäuse Technisches Zeichen.jpg|mini|Gehäuse Technisches Zeichen | |||
<br> | |||
Datei:Gehäuse Decke Technisches Zeichen.jpg|mini|Gehäuse Decke Technisches Zeichen | |||
</gallery> | |||
<br> | |||
[[Datei:Gehäuse Ansicht.jpg|600px|mini|zentriert|Gehäuse Ansicht]] | |||
== Komponententest == | == Komponententest == | ||
=== Getriebe Test === | |||
[[Datei:Getriebe Test.mp4|600px|mini|zentriert|Getriebe Test Video]] | |||
=== Circuit Test === | |||
[[Datei:Circuit Simulation.jpg|600px|mini|zentriert|Circuit Simulation on Breadboard]] | |||
== Ergebnis == | == Ergebnis == | ||
Aktuelle Version vom 9. Januar 2023, 23:48 Uhr
Autoren: Dominique Kamdem und Patrick Glinicki
Betreuer: Prof. Göbel & Prof. Schneider
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)
Einleitung
Das Projekt „ Auto-Stempel“ wurde im Rahmen des GET-Fachpraktikums im 5. Fachsemester des Studienganges Mechatronik absolviert. Ziel des Projektes ist es ein mechatronisches System zu planen, zu bauen, und in Betrieb zu nehmen. Dabei sollen die erlernten Grundlagen und Kenntnisse aus den Vorlesungen, Physik, Elektrotechnik, Mechanik, Informatik, Mess- und Regelungstechnik und weiteren, eingesetzt und vertieft werden.
Der Stempel wird durch einen IR-Sensors ausgelöst, dabei wird ein Stempeldruck auf einem Stück Papier erzeugt. Nach dem Druck soll der Stempelfuß auf seine Ausgangsposition zurück springen, die Bewegung ist durch einen Servomotor stufenweise einstellbar. Die Steuerung soll ein Arduino-Board übernehmen. Das ganze System soll mit einer 9V-Block Batterie betrieben werden.
Anforderungen
| ID | Anforderung |
|---|---|
| 1 | Der Auto-Stempel sollte, mit Hilfe des eingebauten Infra-Rot(IR) Sensor, in der Lage sein, zu erkennen, wenn Papierblätter eingelegt sind |
| 2 | Das System muss mit einer externen Stromversorgung von 9V betrieben werden |
| 3 | Der Servo-Motor sollte nach dem Stempeln anhalten und zurückkehren können |
| 4 | Die Steuerung soll über einen Arduino Mikrochip erfolgen |
| 5 | Das Nachfühlen von Tinte soll reibungslos und zuverlässig |
Funktionaler Systementwurf/Technischer Systementwurf
-
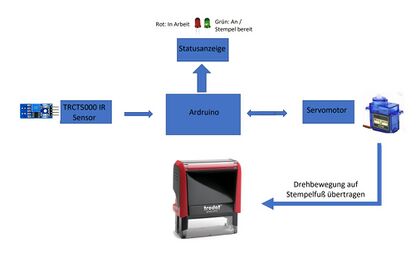
Funktionaler Systementwurf
-
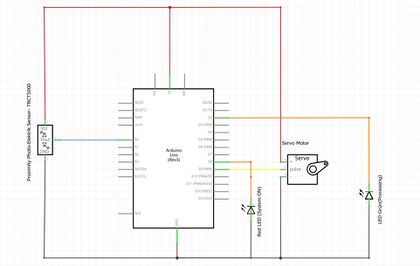
Technischer Systementwurf
-
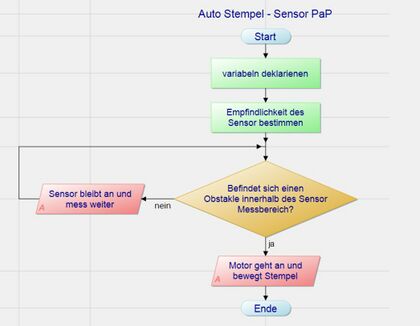
Programm Ablauf Plan



Komponentenspezifikation
Umsetzung (HW/SW)
Software
Das Projekt wird mit Hilfe von;
- SolidWorks
- Arduino IDE und
- PaP Designer Software
- Fritzing
entwickelt
Umsetzung des Programms
Hardware
Zu den Hardwarekomponenten gehören;
- ein Arduino Board
- ein Servomotor
- zwei LEDs unterschiedliche Farben
- ein TRCT5000 Proximity IR Sensor
- ein Stempelfuß
Gehäuse
-
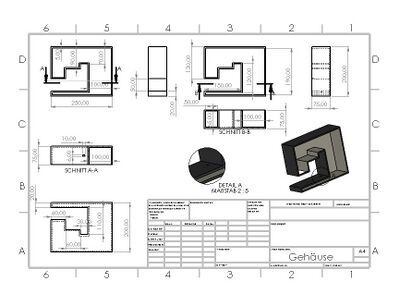
Gehäuse Technisches Zeichen
-
Gehäuse Decke Technisches Zeichen



Komponententest
Getriebe Test
Circuit Test

Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan

Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 21/22: Angewandte Elektrotechnik (BSE)