AF: SEN - Geschwindigkeit
Autoren: David Weigt, Yunkai Lin
Einleitung
Dieser Artikel beschreibt die Funktion SEN - Geschwindigkeit im Simulink Modell ccf_online.sdf.
Anforderungen
| ID | Anforderung | Beschreibung | Priorität | Status |
|---|---|---|---|---|
| 1 | Aus den Signale der Hallsensoren (A, B, C) sollen in einer eindeutigen Lagestatus ermittelt werden. | Die Stati 1-6 werden im Artikel Hall-Sensor beschrieben. | 1 | offen |
| 2 | Die Drehrichtung ist zu ermitteln. | Vorwärts: SenVx_Fahrtrichtung_bit = 1 |
1 | offen |
| 3 | Die Geschwindigkeit in m/s ist zu ermitteln. | Signal: SenVx_vxRoh_f64 Für den Stillstand wird der Wert 0 m/s ausgegeben. |
1 | offen |
| 4 | Die seit Motorstart gefahrene Strecke in m ist zu ermitteln. | Signal: SenVx_sx_K_f64 |
1 | offen |
| 5 | Die Verarbeitung muss anhand der Interupts in Echtzeit erfolgen. | 1 | offen | |
| 6 | Alle Signale sind entsprechend der Richtlinien zu beschriften. | Programmierichtlinie | 2 | offen |
| 7 | Quellcode ist entsprechend der Programmierrichtlinien zu schreiben. | Programmierichtlinie | 2 | offen |
Aufgaben
- Arbeiten Sie in einem Entwicklungszweig.
- Nutzen Sie eine bestehende Messwertdatei.
- Wandeln Sie diese mit funktion_wandle_dspacemess_in_CCF_mess.m um.
- Erstellen Sie eine Offline-Simulation zur Analyse von
SEN-Geschwindigkeit. - Analysieren Sie Schritt für Schritt jeden Block gemessen an den Anforderungen.
- Leiten Sie Maßnahmen ab und besprechen Sie diese mit Prof. Schneider.
- Setzen Sie die abgestimmten Maßnahmen um.
- Stellen Sie die Wirkung der Maßnahmen dar.
- Dokumentieren Sie nachhaltig in SVN.
- Führen Sie die erfolgreich getesteten Änderungen im Hauptzweig (
trunk) zusammen.
Sensorblock - SEN-Geschwindigkeit
Liste offener Punkte (LOP)
| # | Problem | Analyse | Maßnahme | Freigabe | Wirksamkeit | Dokumentation |
|---|---|---|---|---|---|---|
| 1 | Wert zurückgelegter Strecke wird negativ gezählt | Vorzeichen bei Streckenberechnung falsch | Invertieren von SenVx_sx_K_f64 | |||
| 2 | Geschwindigkeitswerte werden herausgefiltert | Ratenbegrenzung filtert Werte weg | Ratenbegrenzung durch Median-Filter ersetzen | |||
| 3 | Gerichtete Geschwindigkeit bei Rückwärtsfahrt wird nicht angezeigt | Ratenbegrenzung filtert vorher zu stark | Siehe Punkt 2 | |||
| 4 | Falscher Geschwindigkeitsverlauf bei SenVx_vx_K_f64 | PT1 filtert zu stark | Frequenz des PT1 anders Parametrieren oder gegen Median-Filter ersetzen | |||
| 5 | Geschwindigkeitswerte oberhalb des Referenzwertes | Berechnung der Geschwindigkeit weicht von Realwert ab (Schlupf?) | Geschwindigkeitsrohwert neu berechnen | |||
| 6 | Geschwindigkeitswerte ab SenVx_vxKorrNull_f64 stark verrauscht | Block zur Überprüfung von vx = 0 Fehlerhaft | Block überarbeiten | |||
| 7 | Beschriftung entspricht nicht den Vorgaben (z. B. Abb. 3 SPEED) | Namen an Vorgaben anpassen und fehlende Beschriftungen und Kommentare ergänzen, Magic Number in Parameterdatei verschieben | x |
Analyse
-
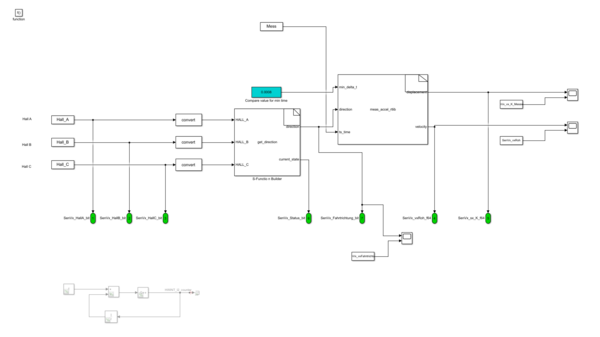 Abb 1: Geschwindigkeitsmodell für Testzwecke
Abb 1: Geschwindigkeitsmodell für Testzwecke

Beschreibung
Das Modell ist für die einzelne Ausführung angepasst. Dafür wurden die Messdaten über den from Workspace geladen. Die Ergebnisse wurden nach der Simulation mit den zuvor gemessenen Ausgabedaten verglichen.
Dabei kann ein direkter Eingriff in das Modell ermitteln, welche Veränderungen dies auf die Ausgangsdaten hat.
Maßnahmen
Wirksamkeit
Zusammenfassung
Dokumentation in SVN
→ zurück zum Hauptartikel: Praktikum SDE | SDE-Team 2023/24 | Optimierung der Module SEN/SAB