Benutzer:Prof. Mirek Göbel: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 7: | Zeile 7: | ||
== Laufende Projekte == | == Laufende Projekte == | ||
<gallery mode="packed"> | <gallery widths="300" mode="packed"> | ||
Zweiarmrobotersystem_UR10.jpg | verweis=Projekte mit dem Zweiarm-Robotersystem UR10 von Prof. Göbel|Zweiarm-Robotersystem UR10 | Zweiarmrobotersystem_UR10.jpg | verweis=Projekte mit dem Zweiarm-Robotersystem UR10 von Prof. Göbel|Zweiarm-Robotersystem UR10 | ||
Prüfstand PinOnDisc aus CAD.JPG | verweis=Tribologieprüftechnik|Tribologieprüftechnik | Prüfstand PinOnDisc aus CAD.JPG | verweis=Tribologieprüftechnik|Tribologieprüftechnik | ||
Version vom 25. Oktober 2017, 19:25 Uhr
Prof. Dr. Mirek Göbel Lehrgebiet Regelungstechnik Hochschule Hamm-Lippstadt
Details siehe Link zur HSHL-Webseite
Laufende Projekte
-
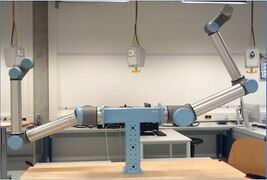 Zweiarm-Robotersystem UR10
Zweiarm-Robotersystem UR10 -
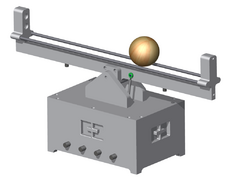
 Tribologieprüftechnik
Tribologieprüftechnik -
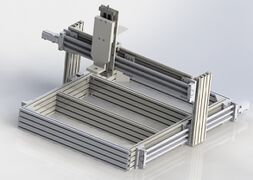 3D-CNC-Bearbeitungsmaschine
3D-CNC-Bearbeitungsmaschine
Verfügbare Themen für Projekt-/Bachelor-/Masterarbeiten
-
Zweiarm-Robotersystem UR10
-
 Konzept/Entwicklung eines Mechatronik-Schüler-Motivations-Projekts
Konzept/Entwicklung eines Mechatronik-Schüler-Motivations-Projekts -
3D-CNC-Bearbeitungsmaschine
-
 Optimierung des Ballbalancierers & Regelung
Optimierung des Ballbalancierers & Regelung -
 Optimierung des inversen Pendels & Regelung
Optimierung des inversen Pendels & Regelung -
 Vollendung eines LED-Würfels
Vollendung eines LED-Würfels
Abgeschlossene Projekte
- Roboter
- Prüftechnik zum allgemeinen Ansteuern von mechatronischen Maschinen Mess-_und_Steuerungssystem_auf_Arduino-Basis
Ein allgemeiner Überblick über studentische Arbeiten findet sich hier.
Hinweise für von mir betreute Studierende
Skripte
Göbel, Prof. Dr. M.: Fahrwerkmanagement. Version 1.5, 2013, Datei:Skript Fahrwerkmanagent ProfGöbel.pdf