SDE WS25: AP 1.2 Schätzung der Roboterpose: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 24: | Zeile 24: | ||
|- | |- | ||
| 1 | | 1 | ||
| | | Punkte der Alphabotposition werden übergeben | ||
| | | | ||
| | | Punkte werden nacheinander übergeben | ||
|- | |- | ||
| 2 | | 2 | ||
| | | korrekter Winkel zur X-Achse wird berechnet | ||
| | | | ||
| Ausgabe von T-Koordinaten | | Ausgabe von T-Koordinaten | ||
|- | |- | ||
| 3 | | 3 | ||
| | | Winkel wird zurückgegeben | ||
| | | | ||
| PW | | PW | ||
|- | |- | ||
|} | |} | ||
Version vom 11. November 2025, 13:46 Uhr

Autor: Benutzer:Jan Steffens
Einleitung/Funktion
Um die Positionserfassung des Alphabots durchzuführen, muss auf die TopCon Station und das zugehörige Prisma zurückgegriffen werden. Diese erfasst das Prisma und überträgt die Position per Bluetoooth an MATLAB.
Vorbereitung
- Bluetooth Dongle in PC einstecken
- Topcon Station in der Mitte der Strecke aufbauen Ausrichtung nach grünem Klebepfeil (siehe Abb. 1)
- TopCon gemäß Artikel in Betrieb nehmen.
- Matlab R2024b auf LAB30-04 starten
- Script trackePrisma.m starten
- TopCon Prisma auf Referenzpunkten A und B platzieren um einzumessen. (Karte)
Anforderungen
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis |
|---|---|---|---|
| 1 | Punkte der Alphabotposition werden übergeben | Punkte werden nacheinander übergeben | |
| 2 | korrekter Winkel zur X-Achse wird berechnet | Ausgabe von T-Koordinaten | |
| 3 | Winkel wird zurückgegeben | PW |
Softwareentwurf
-
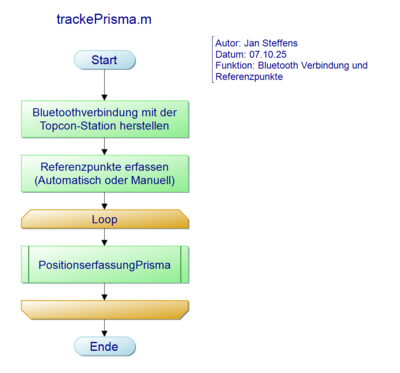 Abb. 1: trackePrisma.m
Abb. 1: trackePrisma.m -
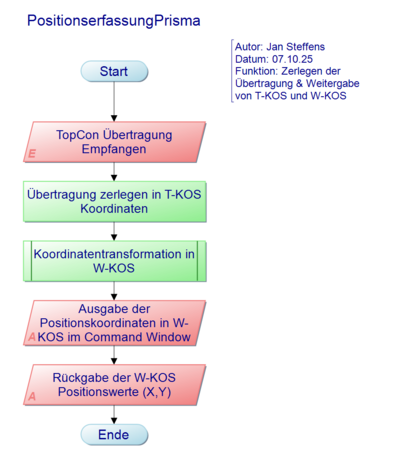 Abb. 2: PositionserfassungPrisma.m
Abb. 2: PositionserfassungPrisma.m


Umsetzung
siehe TrackePrisma.m
Modultest
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | Bluetooth Verbindung TopCon zu PC kann hergestellt werden | >> BT Verbindung hergestellt | Bluetooth Verbindung wurde hergestellt | Jan Steffens | 07.10.2025 | |
| 2 | Übermittlung der T-Koordinaten | Prisma Position | Ausgabe von T-Koordinaten | T-Koordinaten wurden übermittelt | Jan Steffens | 07.10.2025 |
| 3 | Transformation in W-KOS | PT, A, B | PW | W- Koordinaten werden zurückgegeben | Jan Steffens | 07.10.2025 |
| 4 | Richtigkeit der W-Koordinaten | testBerechneRegelabweichungSpur.m, PW, A, B | Karte mit PW eingezeichnet | PW wird auf der Fahrbahnkarte Positionsgetreu abgebildet | Jan Steffens | 10.11.2025 |
-
 Abb. 3: Punkt, an dem der Winkel zur X-Achse 90° beträgt
Abb. 3: Punkt, an dem der Winkel zur X-Achse 90° beträgt -
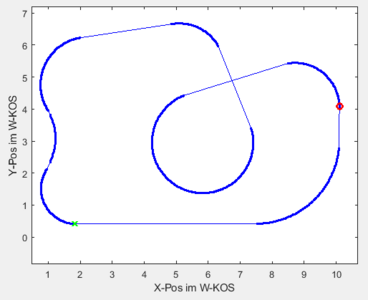 Abb. 4: Startpunkt der Mittelliniendaten und 90°-Punkt auf der Strecke
Abb. 4: Startpunkt der Mittelliniendaten und 90°-Punkt auf der Strecke -
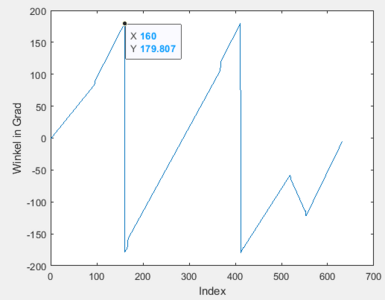 Abb. 5: Winkelverlauf zur x-Achse der Alphabot Ausrichtung
Abb. 5: Winkelverlauf zur x-Achse der Alphabot Ausrichtung



→ zurück zum Hauptartikel: Geregelte Autonome Fahrt