SDE WS25: AP 1.2 Schätzung der Roboterpose
Zur Navigation springen
Zur Suche springen

Autor: Benutzer:Jan Steffens
Einleitung/Funktion
Zur Berechnung der genauen Lage der Mittellinienpunkte auf der Fahrstrecke, muss die Roboterpose, also die Ausrichtung des Alphabots zur X-Achse des Weltkoordinatensystems bestimmt werden.
Vorbereitung
- Matlab R2024b auf PC starten
- Script testpose.m starten
- Script pose.m muss sich im selber Ordner befinden
Anforderungen
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis |
|---|---|---|---|
| 1 | Punkte der Alphabotposition werden übergeben | PW (XPos; YPos) | Punkte werden nacheinander übergeben |
| 2 | korrekter Winkel zur X-Achse wird berechnet | dx, dy | passender Winkel zur Position des Alphabots |
| 3 | Winkel wird zurückgegeben | -180° bis 180° |
Softwareentwurf
-
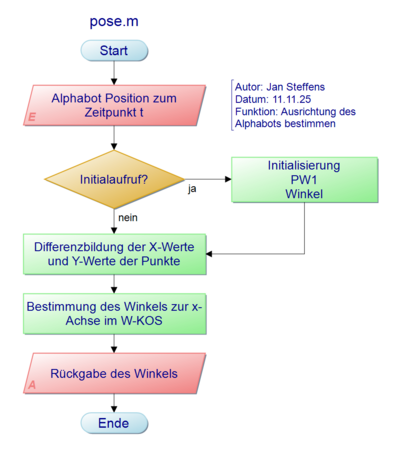 Abb. 1: PAP für pose.m
Abb. 1: PAP für pose.m

Umsetzung
SVN-Links:
Modultest
Für den Modultest werden die Winkel für die fortlaufenden Positionen bestimmt und gesichtet. Als Test wird der Punkt, an dem der Winkel zur X-Achse 90° beträgt, bestimmt und auf der Karte eingezeichnet.
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | Punkte der Alphabotposition werden übergeben | PW (XPos; YPos) | Punkte werden nacheinander übergeben | Punkte werden eingelesen | Jan Steffens | 11.11.2025 |
| 2 | korrekter Winkel zur X-Achse wird berechnet | dx, dy | passender Winkel zur Position des Alphabots | 90° werden erwartet | Jan Steffens | 11.11.2025 |
| 3 | Winkel wird zurückgegeben | -180° bis 180° | 90° wird zurückgegeben | Jan Steffens | 11.11.2025 |
-
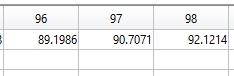 Abb. 3: Punkt, an dem der Winkel zur X-Achse 90° beträgt
Abb. 3: Punkt, an dem der Winkel zur X-Achse 90° beträgt -
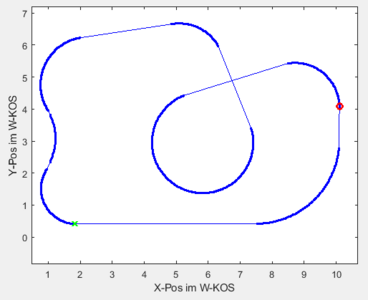 Abb. 4: Startpunkt der Mittelliniendaten und 90°-Punkt auf der Strecke
Abb. 4: Startpunkt der Mittelliniendaten und 90°-Punkt auf der Strecke -
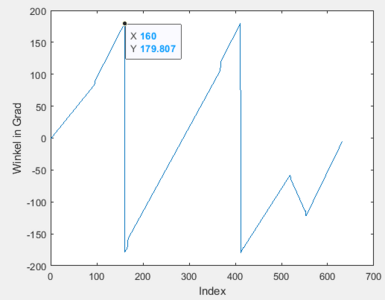 Abb. 5: Winkelverlauf zur x-Achse der Alphabot Ausrichtung
Abb. 5: Winkelverlauf zur x-Achse der Alphabot Ausrichtung



→ zurück zum Hauptartikel: Geregelte Autonome Fahrt