Nutzen Sie die Demos E13_Lichtschranke und E01_MotorenTest im SVN-Verzeichnis.
Nur die IO-Pins D2 und D3 sind beim Arduino Uno interruptfähig.
Legen Sie für eine langsame Raddrehung keine Akkus ein.
Tipp 2
Ergebnisplot: Abb. 4: Ergebnisdarstellung CNTL vs. CNTR Abb. 2: CNTL/CNTR über der Zeit
Aufgabe 5.2: RadInkrementalgeber
Machen Sie sich mit E15_RadInkrementalgeberFahrt vertraut, so dass Sie jede Zeile erläutern können.
Kopieren Sie das Beispiel in Ihren Ordner und erweitern Sie es.
Was ist ein Interrupt und wozu dient er?
Wozu dient die Funktion attachInterrupt()?
Stellen Sie beide Lichtschrankenzustände sowie die Radumdrehungen im seriellen Monitor dar.
Rechnen Sie die Radumdrehungen in gefahrene Strecke um.
Stellen Sie die gefahrene Strecke zusätzlich im seriellen Monitor dar.
Wie lässt sich die Fahrtrichtung ermitteln?
Arbeitsergebnis: testeRadInkrementalgeber.ino, zeigeRadInkrementalgeber.m
Hinweis: Nutzen Sie das Demos E13, E14 im SVN-Verzeichnis.
Tipp 1
Nutzen Sie die Demos E14_RadInkrementalgeber und E15_RadInkrementalgeberFahrt im SVN-Verzeichnis.
Legen Sie den Akku korrekt an, um die Motoren anzusteuern.
Arbeitsergebnis:testeRadInkrementalgeber.ino
Aufgabe 5.3: 1 m Fahrt
Machen Sie sich mit dem Demo E15_Wheel_Encoders_Drive.ino vertraut, so dass Sie jede
Zeile erl?autern k?onnen.
Fahren Sie mit Ihrem Fahrzeug genau 1m geradeaus vorw?arts.
Stellen Sie die gefahrene Strecke auf dem OLED Display dar.
Fahren Sie wieder zum Startpunkt zur?uck. Wenden Sie das Fahrzeug nicht!
Stellen Sie die gefahrene Strecke auf dem OLED Display dar.
Wie kann die Fahrtrichtung bei der Streckenbestimmung ber?ucksichtigt werden?
Hinweis: Nutzen Sie die Demos E01, E15, E22 im SVN-Verzeichnis.
Arbeitsergebnis: fahreVorZurueck.ino - Der AlphaBot inkrementiert die Strecke bei Vorw?artsfahrt
und dekrementiert bei R?uckw?artsfahrt.
Aufgabe 5.4: Fahre Quadrat
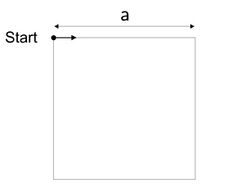
Erweitern Sie Ihr bisheriges Programm, um die Seiten eines Quadrates im Uhrzeigersinn abzufahren (vgl. Abb.3).
2. Die Seitenlänge a ist eine Variable und soll 30 cm betragen.
3. Führen Sie eine Schleife 4x aus, die aus Geradeausfahrt und Drehung besteht.
4. Stellen Sie die gefahrene Strecke auf dem OLED Display dar.
Abb. 4: Fahren Sie im Uhrzeigersinn die Seiten eines Quadrates ab
Arbeitsergebnis:fahreQuadrat.ino
Tipp 1
Nutzen Sie die Demos E01, E15, E22 im SVN-Verzeichnis.
Legen Sie den Akku korrekt an, um die Motoren anzusteuern.
Aufgabe 5.5: Nachhaltige Doku
Sichern Sie alle Ergebnisse mit beschreibendem Text (message) in SVN.