Gesichtsverfolgungskamera: Unterschied zwischen den Versionen
Software - Kommunikation |
|||
| Zeile 189: | Zeile 189: | ||
== YouTube Video == | == YouTube Video == | ||
In dem folgenden youtube-Video [https://youtu.be/Y5aPnTkgRSI YouTube-Video] wird eine Demonstration des Projekts Gesichtverfolgungskamera gezeigt. Die Aufnahme fand in der Hochschule Hamm-Lippstadt mit Genehmigung statt. | |||
{{#ev:youtube|https://youtu.be/Y5aPnTkgRSI| 750 | | Video 1: Gesichtverfolgungskamera im Einsatz |frame}} | |||
== Weblinks == | == Weblinks == | ||
Version vom 9. Januar 2023, 11:04 Uhr

Autoren: Suryaa Kalamani-Ramamoorthy & Aaron-Lasse Paelmke
Betreuer: Prof. Ulrich Schneider
→ zurück zur Übersicht: WS 20/21: Angewandte Elektrotechnik (BSE)
→ zurück zur Übersicht: WS 21/22: Angewandte Elektrotechnik (BSE)
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)
Einleitung
Das Projekt "Gesichtsverfolgungskamera" wird im Rahmen des GET Fachpraktikums im 5. Semester des Studiengangs Mechatronik der HSHL am Campus Lippstadt durchgeführt. Ziel des Projekts ist die Umsetzung eines Systems, das mittels einer Webcam Gesichter erfasst und Mikrokontroller gesteuert dem erfassten Gesicht folgt und es im Fokus behält. Die Durchführung des Projekts soll die erlernten Kenntnisse der Fächer Informatik, Physik, Grundlagen der Elektrotechnik I, Grundlagen der Elektrotechnik II, Elektronische Bauelemente und Grundschaltungen, Aufbau-/ und Verbindungstechnik sowie Mess-/ und Regelungstechnik festigen, vertiefen und neue Erkenntnisse fördern.
Anforderungen
| ID | Anforderung |
|---|---|
| 1 | Allgemein |
| 1.1 | Die Kamera soll Gesichter erkennen und ein einmal erfasstes Gesicht so lange verfolgen, wie es sich im Sichtfeld aufhält. |
| 1.2 | Falls sich mehrere Gesichter im Sichtfeld aufhalten soll nur ein Gesicht erfasst und verfolgt werden. |
| 1.3 | Das System soll den aktuellen Status über LEDs darstellen. |
| 2 | Bildanalyse und Auswertung |
| 2.1 | Die von der Webcam erfassten Bilder sollen mittels eines Algorithmus auf Gesichter gescannt werden. Von den Gesichtern soll der Mittelpunkt erfasst und mit dem Mittelpunkt des Bildes verglichen werden. |
| 2.2 | Anhand der Position des erfassten Gesichts soll der Systemstatus ermittelt werden (Gesicht erkannt und zentriert/Gesicht erkannt nicht zentriert/Gesicht nicht erkannt). |
| 3 | Ausgabe |
| 3.1 | Es soll permanent der Status über LEDs angezeigt werden. |
| 3.2 | Die Servomotoren sollen über den Arduino UNO angesteuert werden und so immer versuchen ein erfasstes Gesicht zu zentrieren. |
Die Tabelle beschreibt die Anforderungen an das Projekt Gesichtserfassungskamera.
Funktionaler Systementwurf/Technischer Systementwurf
Bei den Abbildungen handelt es sich um Skizzen, die sowohl den technischen, als auch den funktionalen Systementwurf verdeutlichen sollen.
Die von der Webcam erfassten Bilder sollen an einen PC übermittelt werden, auf dem eine Software zur Gesichtserkennung läuft. Die Aufnahmen der Webcam sollen auf Gesichter gescannt werden. Die Position des Gesichts auf den Fotos der Webcam soll zentriert werden, wodurch sich ableiten lässt, in welche Richtung sich die Webcam bewegen muss, damit das Gesicht zentriert wird. Zwischen dem PC und dem Arduino UNO Mikrokontroller soll ein Datenaustausch stattfinden, um die Informationen, wie der Arduino die zwei Servomotoren ansteuern soll zu übertragen.
-
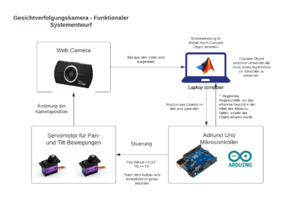 Abb. 1: Funktionaler Systementwurf
Abb. 1: Funktionaler Systementwurf -
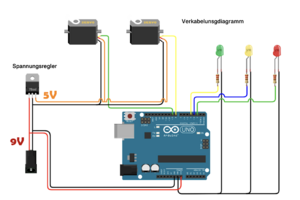 Abb. 2: Verkabelungsdiagramm
Abb. 2: Verkabelungsdiagramm -
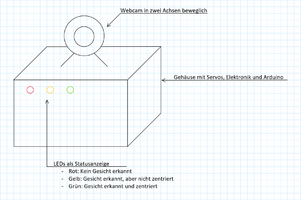 Abb. 3: Skizze des Aufbaus
Abb. 3: Skizze des Aufbaus


Beschreibung der Verdrahtung einfügen (abb. 2)
Komponentenspezifikation
Für das Projekt "Gesichtsverfolgungskamera" kamen diverse Bauteile zum Einsatz. Diese werden im Folgenden aufgeführt und näher betrachtet. Für die einzelnen Komponenten werden ihre Eigenschaften und Spezifikationen dargestellt und beschrieben, sowie auf ihre Funktion im Projekt eingegangen.
Arduino UNO
Bei dem Arduino UNO handelt es sich um einen Mikrokontroller. Dieser Mikrokontroller basiert auf dem ATmega328P. Der Arduino UNO zeichnet sich durch 14 digitale Ein-/ und Ausgangspins aus, von denen 6 als PWM-Ausgänge genutzt werden können.
MG-90S Servomotoren
Die Servomotoren zeichnen sich durch eine kompakte Baugröße aus. Drehmoment, Spannung, sonstige Daten aus dem Datenblatt.
Webcam
LEDs
Sonstiges
Umsetzung (HW/SW)
Hardware
Das Adruino-Gehäuse, der Kamerahalter, die Halterung für die Servomotoren und das Stativ wurden mit der CAD-Software Solidworks entworfen und mittels additiver Fertigung (3D-Druck) gefertigt. Die folgenden Abbildungen sind ein Ausschnitt aus den CAD-Entwürfen.
-
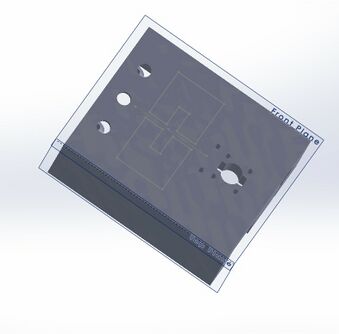 Abb. 5: CAD Ansicht Gehäuse
Abb. 5: CAD Ansicht Gehäuse -
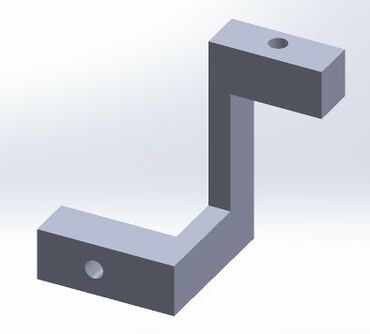 Abb. 6: CAD Ansicht Halter für Servomotoren
Abb. 6: CAD Ansicht Halter für Servomotoren -
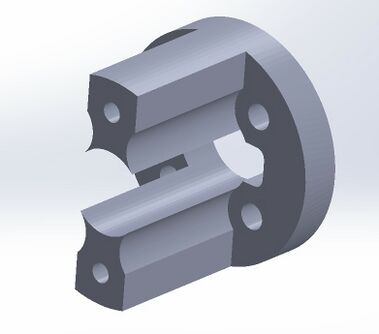 Abb. 7: CAD Ansicht Kamerastativ
Abb. 7: CAD Ansicht Kamerastativ -
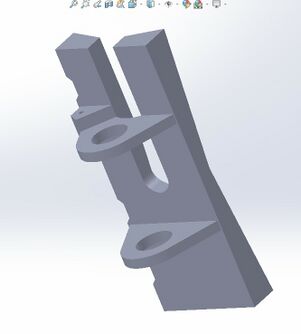 Abb. 8: CAD Ansicht Webcamhalter
Abb. 8: CAD Ansicht Webcamhalter




3d-druck material ergänzen
Montage und Verdrahtung
Die Grundplatte des Gehäuses (Abb. 5) ist der Arduino UNO Mikrokontroller. Dieser wird mittels Schrauben im Gehäuse befestigt. An der Rückseite des Gehäuses befinden sich zwei Steckplätze für die Anschlüsse der Versorgungsspannung und des USB Typ B Steckers, mit dem die Verbindung zwischen Arduino und PC hergestellt wird. Die Verdrahtung des Projekts wurde im Gehäuse versteckt.
Software
Im folgenden ist das Programm für die Steuerung der Gesichtsverfolgungskamera dargestllt. Der Code ist im SVN unter folgendem Link zu finden: [link einfügen]
Kommunikation
Zu Beginn ist die Kommunikation zwischen der Hardware und dem Computer erforderlich. In diesem Projekt werden zahlreiche Toolboxen und Bibliotheken verwendet, z.B. die Image Acquisition Toolbox, um Bilder von der Webkamera zu erhalten, die Computer Vision Toolbox für die Bildverarbeitung und die Kommunikationsschnittstelle zwischen dem Arduino Mikrocontroller und dem Computer.
Im folgenden Softwareskript gibt die Header-Datei einen Überblick darüber, welche Tools und Bibliotheken verwendet werden. Anschließend wird die Kommunikationsschnittstelle dieses Projekts erläutert, z. B. der Handshake des Servomotors und die Auswahl der Bildauflösung.
%% ***********************************************************************\
%
% Modul : Gesichtverfolgungskamera.m
%
% Datum : 20.10.2022
%
% Beschreibung : Die vollständige Implementierung von Bildverarbeitung
% und Gesichverfolgung
%
% Implementierung : MATLAB R2019b
%
% Toolbox : 1. Matlab Webcam Support package,
% 2. Adruino support package for matlab,
% 3. Computer Vission toolbox
%
% Autor : Kalamani, Suryaa und Laase, Aaron
%
% Bemerkung :
%
% Letzte Änderung : 07.12.2022
%
%*************************************************************************/
%%
% Workplace aufräumen
clear all
clc
%% Objekt erstenn - Kommunikation zwischen Matlab und Arduino
if ~exist('a_Obj', 'var')
a_Obj = arduino('COM3','Uno','Libraries','Servo');
% Pin belege 8 und 9 entspechricht die Pan und Tilt Servo
panServo = servo(a_Obj,'D8');
tiltServo = servo(a_Obj,'D9');
%% Kommunikation für Linux oder Mac OS
%a_Obj = arduino('/dev/tty.usbmodem2101','Uno','Libraries','Servo');
%/dev/tty.usbmodem2101 For mac
end
%% Start Position Motoren - Handshake
writePosition(tiltServo,0);
writePosition(tiltServo,0.70);
% Pausenzeit nach einer Servobewegung
pause_time = 0.0025;
%% Kamera bereitstellen
Kamera_ID = 2; % Je nach USB Schnittstellen und Port, muss die richtige Kamera ID ausgewählt werden
Kamera = webcam(Kamera_ID); % Zugriff auf Kamera durch Kamera Aquisation Toolbox
% Kamera.AvailableResolution - Mit der Funktion die passende Aufloesung auswaehlen
Kamera.Resolution = '1280x720'; %'1280x720'; %'640x480'
% Zur Bildverarbeitung und Darstellugn wird das Videoplayer Objekt erstellt
videoPlayer = vision.VideoPlayer('Position',[100 100 1280 720]);
Komponententest
servomotor bewegung testaufbau auf breadboard / kommunikation zwischen matlab und arduino / motorbewegung / Kameraauflösung (passenden auswahl der auflösung, verschiedene wurden ausprobiert) / Feintuning der Schrittweite der servomotoren bei zusammengebautem modell (abängig von der Bildverarbeitungsgeschwindigkeit des rechners) /
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan
Projektdurchführung
YouTube Video
In dem folgenden youtube-Video YouTube-Video wird eine Demonstration des Projekts Gesichtverfolgungskamera gezeigt. Die Aufnahme fand in der Hochschule Hamm-Lippstadt mit Genehmigung statt.
Weblinks
Literatur
→ zurück zur Übersicht: Kategorie:ProjekteET MTR BSE WS2022