Arduino Ballbalancierer: Unterschied zwischen den Versionen
| Zeile 144: | Zeile 144: | ||
=== Projektplan === | === Projektplan === | ||
<gallery widths="1500" heights="350"> | |||
Datei:Projektplan Ballbalancierer.jpg|Abb. 3: Projektplan Arduino Ballbalancierer | |||
</gallery> | |||
=== Projektdurchführung === | === Projektdurchführung === | ||
Version vom 4. Oktober 2022, 11:07 Uhr
Autoren: Niklas Reeker & Marius Erdmann
Betreuer: Prof. Dr.-Ing. Mirek Göbel & Prof. Dr.-Ing. Ulrich Schneider
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)
Einleitung
Im Rahmen des GET-Fachpraktikums ensteht das Projekt Arduino Ballbalancierer. Bei diesem wird ein Ball mithilfe von Steuerungs- und Regelungsalgorithmen in der Mitte einer Wippe ausbalanciert. Auf externe Störeinflüsse soll das mechatronische System reagieren und den Ball schnellstmöglich an seine urspüngliche Position zurückbewegen. Eine RGB-LED zeigt zudem an ob das System Betriebsbereit ist.
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Fertigen der mechanischen Konstruktion mittels 3D-Druck. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 2 | Stromversorgung von Servomotor, Sensor, LED und Arduino. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 3 | Starten des Arduino Programms bei vorhandener Stromversorgung. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 4 | Korrekte Statusanzeige der LED (System mit Spannung versorgt, System aktiv). | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 5 | Korrekte Entfernungsmessung des Sensors. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 6 | Ansteuerung des Servomotors. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 7 | Umsetzung der Regelung mit einem PID-Regler. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 8 | Passende Einstellung der PID-Regelung. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 9 | Visuelle Rückmeldung über die LED, wenn der Ball in der Mitte ist. | Niklas Reeker & Marius Erdmann | 04.10.2022 |
Tabelle 1 zeigt die funktionalen Anforderungen.
Funktionaler Systementwurf/Technischer Systementwurf
-
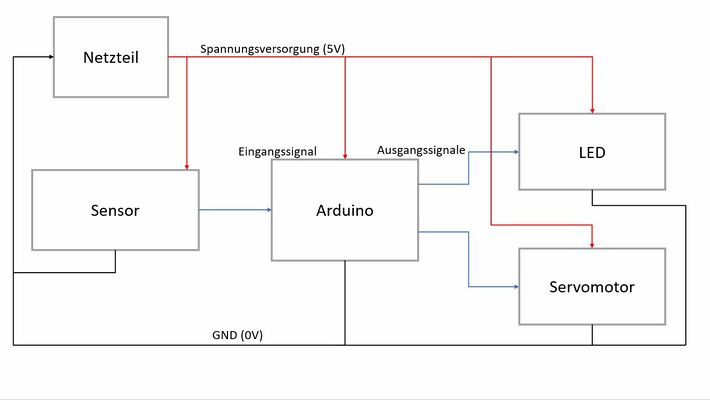 Abb. 1: Technischer Systementwurf
Abb. 1: Technischer Systementwurf -
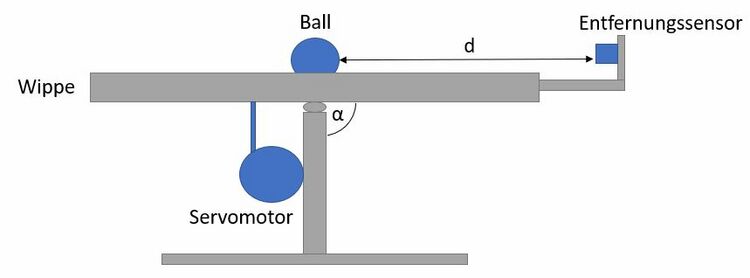 Abb. 2: Funktionaler Systementwurf
Abb. 2: Funktionaler Systementwurf


Komponentenspezifikation
| ID | Komponente | Bezeichnung | |
|---|---|---|---|
| 1 | Gehäuse und Wippe | Eigenbau (3D-Druck) | |
| 2 | Arduino Nano | A000005 | |
| 3 | Sharp Entfernungssensor | GP2Y0A21YK0F | |
| 4 | Futaba Servomotor | S3003 | |
| 4 | RGB-LED | LL 5-8000RGB |
Tabelle 2 zeigt die benötigten Komponenten für den Aufbau des Ballbalancierers.
Umsetzung (HW/SW)
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan
-
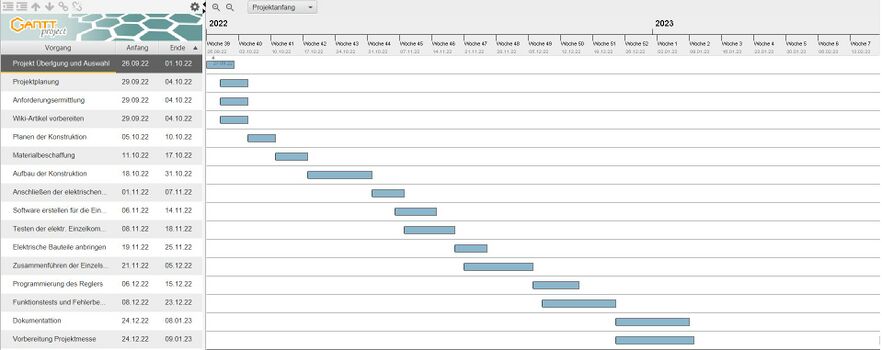 Abb. 3: Projektplan Arduino Ballbalancierer
Abb. 3: Projektplan Arduino Ballbalancierer

Projektdurchführung
Nach Erstellung eines Projektplans erfolgt die Auswahl und Beschaffung der Sensoren und Aktoren sowie aller weiteren Bauelemente/Bauteile. Anschließend soll die Konstruktion aller benötigten Teile in SolidWorks erfolgen, um diese mit einem 3D-Drucker herzustellen. Nach dem Zusammenbau der gedruckten Teile erfolgt das Anschließen und Testen der elektronischen Einzelkomponenten. Die dafür zu schreibenden Softwareschnipsel werden später für das Gesamtprogramm zusammengeführt. Nach dem Einbau aller elektrischen Komponenten in das Gesamtsystem wird noch der PID-Regler eingestellt. Zum Schluss wird die Funktionalität des Gesamtsystems überprüft und ein YouTube-Video gedreht.
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)