Arduino Ballbalancierer: Unterschied zwischen den Versionen
| Zeile 144: | Zeile 144: | ||
== Projektunterlagen == | == Projektunterlagen == | ||
=== Projektplan === | === Projektplan === | ||
[[Datei:Projektplan Ballbalancierer.jpg|Abb. 3: Projektplan Arduino Ballbalancierer]] | |||
=== Projektdurchführung === | === Projektdurchführung === | ||
Version vom 4. Oktober 2022, 10:57 Uhr
Autoren: Niklas Reeker & Marius Erdmann
Betreuer: Prof. Dr.-Ing. Mirek Göbel & Prof. Dr.-Ing. Ulrich Schneider
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)
Einleitung
Im Rahmen des GET-Fachpraktikums ensteht das Projekt Arduino Ballbalancierer. Bei diesem wird ein Ball mithilfe von Steuerungs- und Regelungsalgorithmen in der Mitte einer Wippe ausbalanciert. Auf externe Störeinflüsse soll das mechatronische System reagieren und den Ball schnellstmöglich an seine urspüngliche Position zurückbewegen. Eine RGB-LED zeigt zudem an ob das System Betriebsbereit ist.
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Fertigen der mechanischen Konstruktion mittels 3D-Druck. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 2 | Stromversorgung von Servomotor, Sensor, LED und Arduino. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 3 | Starten des Arduino Programms bei vorhandener Stromversorgung. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 4 | Korrekte Statusanzeige der LED (System mit Spannung versorgt, System aktiv). | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 5 | Korrekte Entfernungsmessung des Sensors. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 6 | Ansteuerung des Servomotors. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 7 | Umsetzung der Regelung mit einem PID-Regler. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 8 | Passende Einstellung der PID-Regelung. | Niklas Reeker & Marius Erdmann | 04.10.2022 | ||
| 9 | Visuelle Rückmeldung über die LED, wenn der Ball in der Mitte ist. | Niklas Reeker & Marius Erdmann | 04.10.2022 |
Tabelle 1 zeigt die funktionalen Anforderungen.
Funktionaler Systementwurf/Technischer Systementwurf
-
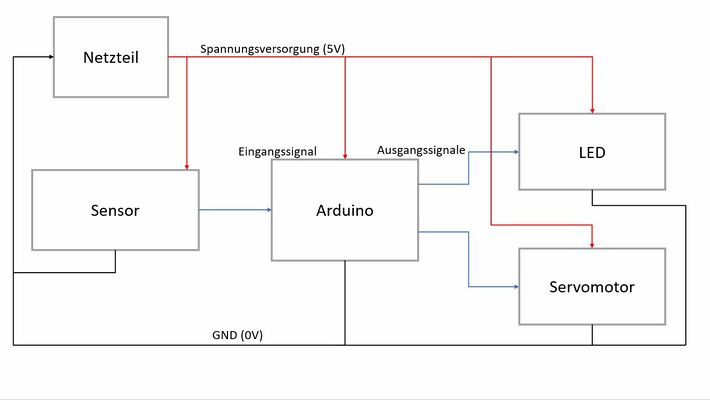 Abb. 1: Technischer Systementwurf
Abb. 1: Technischer Systementwurf -
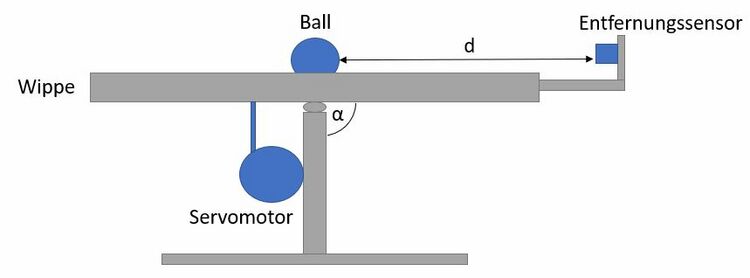 Abb. 2: Funktionaler Systementwurf
Abb. 2: Funktionaler Systementwurf


Komponentenspezifikation
| ID | Komponente | Bezeichnung | Bild |
|---|---|---|---|
| 1 | Gehäuse und Wippe | Eigenbau (3D-Druck) | |
| 2 | Arduino Nano | A000005 | |
| 3 | Sharp Entfernungssensor | GP2Y0A21YK0F | |
| 4 | Futaba Servomotor | S3003 | |
| 4 | RGB-LED | LL 5-8000RGB |
Tabelle 2 zeigt die benötigten Komponenten für den Aufbau des Ballbalancierers.
Umsetzung (HW/SW)
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan

Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)