Stopplinienerkennung mit Hough-Transformation: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| Zeile 24: | Zeile 24: | ||
Der Programmablauf der Stopplinienerkennung ist in Abbildung 3 zu sehen. Auf dem Auto wird in regelmäßigen Schritten ein neues Bild mit der Kamera aufgenommen. Das Bild der Kamera wird dann in der Bildtransformation zunächst in ein Graustufenbild gewandelt und in die Vogelperspektive transformiert. danach erfolgt in der [[OSE - Objekt - und Spurerkennung|Spurerkennung]] die Berechnung des Spurpolynoms. Das in die Vogelperspektive transformierte Bild und die Koeffizienten des Spurpolynoms, werden dann der Stopplinienerkennung übergeben. Das Programm der Stopplinienerkennung führt dann die Schritte wie in Abbildung 3 zu sehen für jedes Bild aus. Im folgenden werden die einzelnen Schritte des Programmablaufes beschrieben. | Der Programmablauf der Stopplinienerkennung ist in Abbildung 3 zu sehen. Auf dem Auto wird in regelmäßigen Schritten ein neues Bild mit der Kamera aufgenommen. Das Bild der Kamera wird dann in der Bildtransformation zunächst in ein Graustufenbild gewandelt und in die Vogelperspektive transformiert. danach erfolgt in der [[OSE - Objekt - und Spurerkennung|Spurerkennung]] die Berechnung des Spurpolynoms. Das in die Vogelperspektive transformierte Bild und die Koeffizienten des Spurpolynoms, werden dann der Stopplinienerkennung übergeben. Das Programm der Stopplinienerkennung führt dann die Schritte wie in Abbildung 3 zu sehen für jedes Bild aus. Im folgenden werden die einzelnen Schritte des Programmablaufes beschrieben. | ||
'''1. Eingabe''' | |||
Das Bild der Kamera wird zunächst in der Bildtransformation in ein Graustufenbild gewandelt und in die Vogelperspektive transformiert. | |||
Danach erfolgt in der [[OSE - Objekt - und Spurerkennung|Spurerkennung]] die Berechnung des Spurpolynoms. Das Spurpolynom beschreibt den Verlauf der Fahrbahn in dem aufgenommenen Bild. Das Spurpolynom ist ein Polynom 2. grades und hat folgende Form: <br> | |||
<br> | |||
<math>f(x) = ax^2+bx+c</math> | |||
<br> | |||
Das in die Vogelperspektive transformierte Bild und die Koeffizienten a, b und c des Spurpolynoms, werden dann der Stopplinienerkennung als Funktionsparameter übergeben. | |||
== Test == | == Test == | ||
Version vom 9. Februar 2021, 07:45 Uhr
Autor: Kevin Hustedt, Moritz Oberg
Einleitung
Im Praktikum des Studienschwerpunkts Systems Designe Engineering des Studiengangs Mechatronik, wird ein autonom fahrendes Modellauto entwickelt. Dieses Auto soll auf einem Rundkurs fahren, der unteranderem Kreuzungen mit Stopplinien beinhaltet. Das Auto soll automatisch an diesen Stopplinien halten. Für das Stoppen muss das Auto die Stopplinien über die eingebaute Kamera erkennen und den Abstand fortlaufend berechnen. Dies geht aus dem Lastenheft des Praktikums hervor (vgl. Abb. 1).
Lastenheft
-
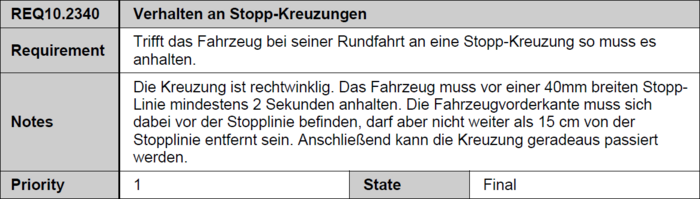 Abbildung 1: REQ.10.2340 Verhalten an Stopp-Kreuzungen
Abbildung 1: REQ.10.2340 Verhalten an Stopp-Kreuzungen

Pflichtenheft
Programmablaufplan
-
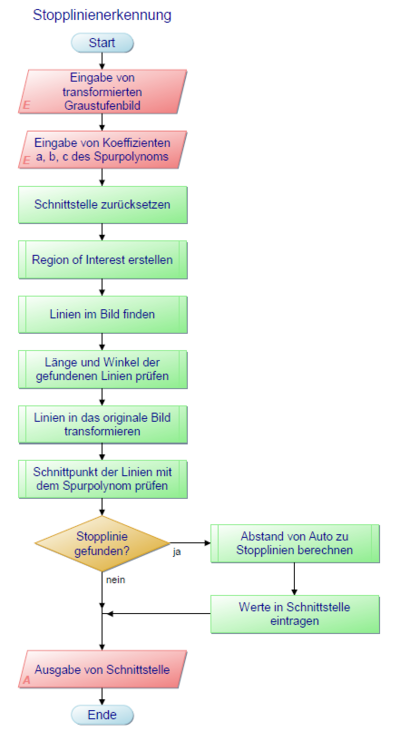 Abbildung 3: Programmablaufplan der Stopplinienerkennung
Abbildung 3: Programmablaufplan der Stopplinienerkennung -
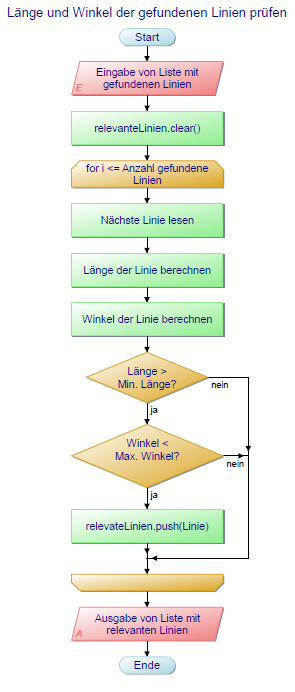 Abbildung 4: Unterprogramm zum Überprüfen der Länge und des Winkels
Abbildung 4: Unterprogramm zum Überprüfen der Länge und des Winkels -
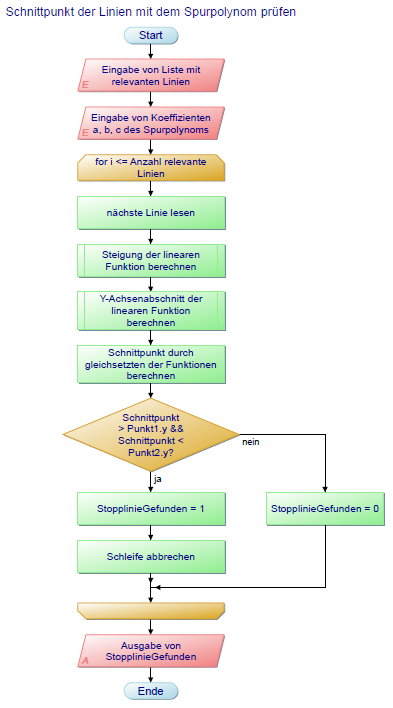 Abbildung 5: Unterprogramm zum Überprüfen des Schnittpunktes
Abbildung 5: Unterprogramm zum Überprüfen des Schnittpunktes



Programm
Die Stopplinienerkennung wurde in der Programmiersprache C/C++ umgesetzt. Als Entwicklungsumgebung diente Visual Studio 2019. Es wurden Funktionen und Datentypen aus der Programmbibliothek OpenCV verwendet. Die Bibliothek muss für die Verwendung in die Entwicklungsumgebung Visual Studio eingebunden werden, eine ausführliche Anleitung für das Einbinden ist hier zu finden: Einrichten von OpenCV
Programmablauf
Der Programmablauf der Stopplinienerkennung ist in Abbildung 3 zu sehen. Auf dem Auto wird in regelmäßigen Schritten ein neues Bild mit der Kamera aufgenommen. Das Bild der Kamera wird dann in der Bildtransformation zunächst in ein Graustufenbild gewandelt und in die Vogelperspektive transformiert. danach erfolgt in der Spurerkennung die Berechnung des Spurpolynoms. Das in die Vogelperspektive transformierte Bild und die Koeffizienten des Spurpolynoms, werden dann der Stopplinienerkennung übergeben. Das Programm der Stopplinienerkennung führt dann die Schritte wie in Abbildung 3 zu sehen für jedes Bild aus. Im folgenden werden die einzelnen Schritte des Programmablaufes beschrieben.
1. Eingabe
Das Bild der Kamera wird zunächst in der Bildtransformation in ein Graustufenbild gewandelt und in die Vogelperspektive transformiert.
Danach erfolgt in der Spurerkennung die Berechnung des Spurpolynoms. Das Spurpolynom beschreibt den Verlauf der Fahrbahn in dem aufgenommenen Bild. Das Spurpolynom ist ein Polynom 2. grades und hat folgende Form:
Das in die Vogelperspektive transformierte Bild und die Koeffizienten a, b und c des Spurpolynoms, werden dann der Stopplinienerkennung als Funktionsparameter übergeben.