SoSe24 - Praktikum Systementwurf - Spurerkennung mit Kamera (Modul OSE): Unterschied zwischen den Versionen
Markierung: Zurückgesetzt |
Markierung: Manuelle Zurücksetzung |
||
| Zeile 120: | Zeile 120: | ||
| <strong>Tipp </strong> | | <strong>Tipp </strong> | ||
|- | |- | ||
| | |||
# Nutzen Sie [https://www.mathworks.com/help/images/ref/bwconncomp.html <code>bwlabel<code>] um zusammenhängende Gebiete segmentieren. | # Nutzen Sie [https://www.mathworks.com/help/images/ref/bwconncomp.html <code>bwlabel<code>] um zusammenhängende Gebiete segmentieren. | ||
# Wählen Sie das räumlich nächste Segment rechts der Bildmitte (376,531). | # Wählen Sie das räumlich nächste Segment rechts der Bildmitte (376,531). | ||
Version vom 18. Juni 2024, 08:11 Uhr

| Autor: | Prof. Dr.-Ing. Schneider |
| Thema: | Spurerkennung mit Kamera (OSE) |
| Workshoptermin 9: | 20.06.2024 |
| Lernzielkontrolle 3: | 04.07.2024 |
Einleitung
Die Workshops im SDE Praktikum sollen die Studierenden das praktische Arbeiten in einem Mechatroniklabor im Bereich modellbasierte Entwicklung mit MATLAB/Simulink und DSpace Hardware DS1104/ControlDesk vermitteln. Der Umgang soll in der Selbstlernzeit geübt werden.
Im Projekt OSE werden Objekte mit dem LiDAR-Sensor erkannt und verarbeitet sowie die Fahrspur mit der Kamera. Dieser Workshop fokussiert die Spurerkennung sowie die Bildung und des Spurpolynoms.
Lernziele
Nach erfolgreicher Teilnahme am Workshop:
- können Sie die intrinsischen und extrinsischen Parameter einer Kamera bestimmen.
- können Sie eine Inverse Perspektiventransformation durchführen.
- können Sie Fahrbahnmarkierungen segmentieren.
- können Sie das Spurpolynom maßstabsgetreu bestimmen.
Bewertung
Die Bewertung erfolgt im Rahmen der Lernzielkontrolle 3.
Voraussetzungen
- Für den Workshop benötigen Sie MATLAB/Simulink in der Version 2019b.
- Studieren Sie die Praktikumsordnung.
- Die unter Vorbereitung aufgeführten Aufgaben sind vor dem Workshoptermin vorzubereiten. Der Workshop baut auf Ihre Vorbereitung auf.
Der Workshop setzt nachfolgende Kenntnisse voraus:
- die Grundlagen der Programmierung,
- der Umgang mit der Versionsverwaltung SVN und
- der Umgang mit MATLAB/Simulink.
- der Grundlagen der Digitalen Signal- und Bildverarbeitung:
- Lektion 2: Koordinatentransformationen
- Lektion 7: Kantenerkennung und Rauschunterdrückung
- Lektion 8: Datengetriebene Segmentierung
Ablauf des Praktikums
| Uhrzeit | Agenda | Form |
|---|---|---|
| 8:15 | Begrüßung | Moderation durch Marc Ebmeyer |
| 8:20 | Bearbeitung der Aufgaben (vgl. Tabelle 2) | Gruppenarbeit |
| 10:10 | Statusbericht der Teams | max. 5 Min. pro Team |
| 10:25 | Verabschiedung | Moderation durch Marc Ebmeyer |
| 10:30 Uhr | Veranstaltungsende |
Vorbereitung
Aufgabe 9.1: Vorbereitung der Kamera

Um eine Kamera sinnvoll zur Spurerkennung einsetzen zu können, muss diese zuvor kalibriert werden.
- Studieren Sie die zugehörigen Wiki-Artikel und arbeiten Sie sich in die Camera Calibrator App von MATLAB® ein.
- Messen Sie die extrinsische und intrinsische Parameter der Kameras von Wagen 1 und 2 mit der MATLAB® Camera Calibrator App.
- Identifizieren Sie extrinsische und intrinsische Parameter.
- Machen Sie ein Foto eines vermessenen Aufbaus.
- Transformieren Sie einen vermessenen Punkt von Weltkoordinaten in Bildkoordinaten.
- Machen Sie ein Foto mit der Kamera auf der Fahrbahn von der Startlinie aus (Geradeaus.jpg).
- Machen Sie ein Foto mit der Kamera auf der Fahrbahn von der ersten Kurve aus (Linkskurve.jpg).
- Entzerren Sie beide Fotos anhand Ihrer ermittelten k-Matrix mit dem MATLAB®-Skript
entzerreVideobild. - Dokumentieren Sie Ihren Versuchsaufbau, die Durchführung und Ergebnisse.
Arbeitsergebnisse:
- Extrinsische Kameraparameter:
- Intrinsische Kameraparameter: k-Matrix
- Eingangsdaten: Geradeaus.jpg, Linkskurve.jpg
- MATLAB®-Skript
entzerreVideobild, welches anhand der intrinsischen Kameraparameter die Bildentzerrung durchführt. - Versuchsprotokoll
Kamerakalibrierung.docx
Lernzielkontrollfragen:
- Welche intrinsischen und extrinsischen Kameraparameter haben Wagen 1 und 2?
- Welchen Region-of-Interest (ROI) haben die Kameras?
- Wie ist der Zusammenhang zwischen Welt- und Bildkoordinaten?
- Welchen Blindbereich in Fahrzeugkoordinaten haben Wagen 1 und 2 ()?
Links
- HSHL-Wiki: Kalibrierung_der_Kamera
- MATLAB® Camera Calibrator App
- OSE:_Bildverarbeitung_mit_Spurerkennung
| Tipps |
|
Aufgabe 9.2: Segmentierung der Fahrbahnmarkierungen



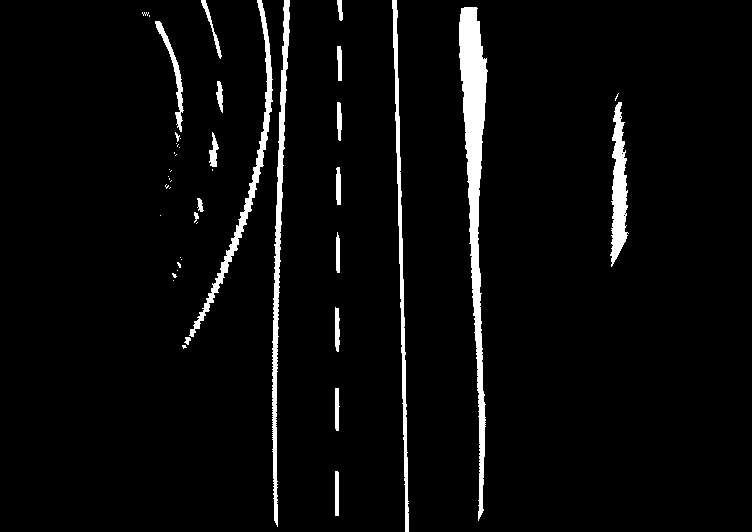
- Laden Sie das Bild
Spurkandidaten_F040.png(vgl. Abb. 3). - Segmentieren Sie aus dem Kantenbild die rechte Fahrbahnmarkierungen. Welche Algorithmen der Vorlesung "Digitale Signal und Bildverarbeitung" lassen sich anwenden?
- Zeigen Sie das Segment farbig im Bild an.
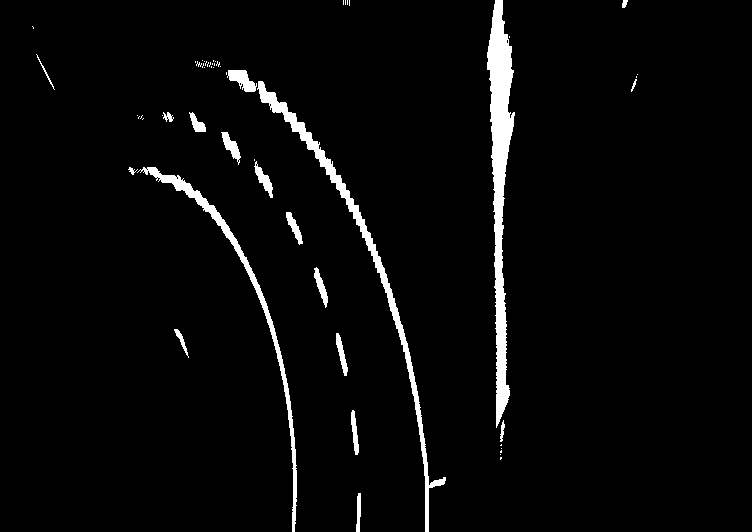
- Verifizieren Sie Ihren Segmentierungsalgorithmus mit den Bildern Spurkandidaten F160.png und Spurkandidaten F350.png.
Eingangsdateien:
{kind=link}
{kind=link}
{kind=link}
Arbeitsergebnis: Segmentierung der X-Y-Daten der rechten Fahrspuren für die unterschiedlichen Eingangsdateien mit dem Skript segmentiereFahrbahnmarkierung.m.
| Tipp |
|
| Musterlösung |
 |
Aufgabe 9.3: Spurpolynom

- Bestimmen Sie für die rechte Fahrbahnmarkierungen das Spurpolynome 2. Ordnung mit
polyfit. - Ersetzen Sie
polyfitdurch die einfache Polynomapproximationinterpoliere_weg.m. - Berechnen Sie aus dem Spurpolynom die rechte Fahrbahnmarkierungen.
- Blenden Sie die rechte Fahrbahnmarkierungen im Videobild für die Bildframes 40, 160 und 350 ein.
Demo: https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Software/Demos/Lane_Tracking
Arbeitsergebnis: Spurpolynome für die Bildframes 40, 160 und 350, visuelle Überprüfung durch Einblendung in die Bilddateien zeigeSpurpolynom.m
| Tipp 1 |
|
Verwenden Sie die LaTeX-Notation im Titel. title(['p(x)=',num2str(p(1)),'$$\frac{1}{m} \cdot x^2 + $$',num2str(p(2)),'$$ \cdot x + $$',num2str(p(3)),'$$\,m$$'],'interpreter','latex')
|
Durchführung
Themen der Teams
| # | Thema | Teilnehmer |
|---|---|---|
| 1 | 9.4 Inverse Perspektiventransformation (IPT) | Daniel Block, Paul Janzen |
| 2 | 9.5 Segmentierung der Fahrbahnmarkierungen | Dennis Fleer, Philipp Sander |
| 3 | 9.6 Spurpolynom | Yunkai Lin, Xiangyao Liu, Yuhan Pan |
Aufgabe 9.4: Inverse Perspektiventransformation (IPT)
- Studieren Sie den Artikel zur Inversen Perspektiventransformation mit MATLAB®.
- Beschreiben Sie die Eingangsparameter. Nutzen Sie die Parameter von Gruppe 1.
- Beschreiben Sie die Ausgangsparameter.
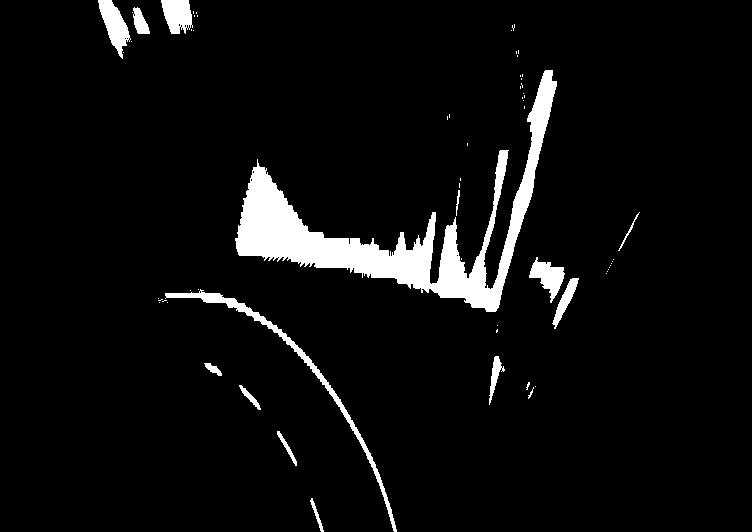
- Wenden Sie die IPT auf das Video
Rundkurs.mp4an. - Bewerten Sie Ihr Ergebnis und aktualisieren Sie ggf. den Wiki-Artikel.
- Konvertieren Sie mittels IPT das Video
Spurerkennung.mpg.
Eingangsdateien: SVN: Rundkurs.mp4, Spurerkennung.mp4
Arbeitsergebnisse:
- Versuchsprotokoll
InversePerspektiventransformation.docx - Transformiertes Video
Spurerkennung_IPT.mp4 - Dokumentation im Wiki (Verlinken Sie hier Ihr Ergebnis.)
Aufgaben 9.5: Segmentierung der Fahrbahnmarkierungen
- Segmentieren Sie die Fahrspuren aus dem Video
Spurerkennung_IPT.mp4. - Segmentieren Sie aus dem Binärbild die rechte Fahrbahnmarkierungen
- Zeigen Sie dieses Segmente magentafarbend im Video an.
Eingangsdateien: Spurerkennung_IPT.mp4
Arbeitsergebnisse:
- X-Y-Daten der drei Fahrspuren für jeden Zyklus des Films
segmentiereFahrbahnmarkierung.malsFahrbahnsegmente.mat
Aufgaben 9.6: Spurpolynom
- Bestimmen Sie für die drei Spuren die Spurpolynome 2. Ordnung mit
interpoliere_weg.m. - Berechnen Sie aus dem Spurpolynom die drei Fahrspuren metrisch im Fahrzeugkoordinatensystem.
- Blenden Sie die drei Fahrspuren im Videobild ein.
Eingangsdateien: Spurerkennung_IPT.mp4
Arbeitsergebnisse:
- Spurpolynome für jeden Zyklus des Films, Visuelle Überprüfung durch Einblendung in das Video
zeigeSpurpolynom.m - Versuchsprotokoll
Spurpolynom.docx - Spurpolynom als
Spurpolynom.mat - Dokumentation im Wiki (Verlinken Sie hier Ihr Ergebnis.)
Nützlicher Link
- Allgemeine Anforderungen an ein Versuchsprotokoll
- MATLAB®-Skript, welches die Messung in eine Auswertedatei umwandelt: funktion_wandle_dspacemess_in_CCF_mess.m
→ zurück zum Hauptartikel: Praktikum SDE | SDE-Team 2024/25