Die Workshops im SDE Praktikum sollen die Studierenden das praktische Arbeiten in einem Mechatroniklabor im Bereich modellbasierte Entwicklung mit MATLAB/Simulink und DSpace Hardware DS1104/ControlDesk vermitteln. Der Umgang soll in der Selbstlernzeit geübt werden.
Im Projekt OSE werden Objekte mit dem LiDAR-Sensor erkannt und verarbeitet sowie die Fahrspur mit der Kamera. Dieser Workshop fokussiert die Spurerkennung sowie die Bildung und des Spurpolynoms.
Lernziele
Nach erfolgreicher Teilnahme am Workshop:
können Sie die intrinsischen und extrinsischen Parameter einer Kamera bestimmen.
können Sie eine Inverse Perspektiventransformation durchführen.
können Sie Fahrbahnmarkierungen segmentieren.
können Sie das Spurpolynom maßstabsgetreu bestimmen.
Das Schachbrett zur Kalibrierung existiert bereits im Labor.
Bei der Bilderreihe muss das Schachbrettmuster den gesamten Bildbereich abdecken.
Legen Sie das Schachbrett flach auf den Boden und vermessen Sie die Position in Bezug auf die Kamera mit einem Maßband. So können Sie Lage und Pose der verbauten Kamera in MATLAB® ablesen.
Aufgabe 9.2: Segmentierung der Fahrbahnmarkierungen
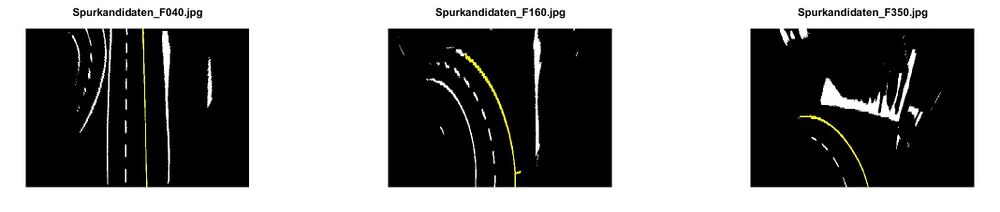
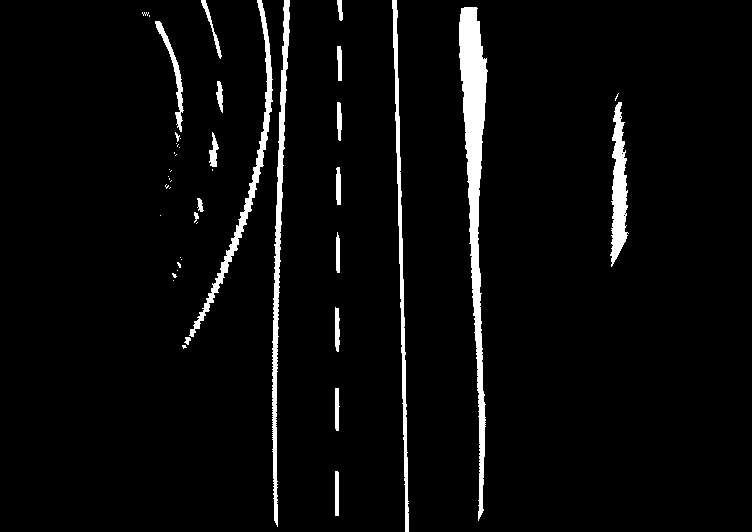
Laden Sie das Bild Spurkandidaten_F040.png (vgl. Abb. 3).
Segmentieren Sie aus dem Kantenbild die rechte Fahrbahnmarkierungen. Welche Algorithmen der Vorlesung "Digitale Signal und Bildverarbeitung" lassen sich anwenden?
Zeigen Sie das Segment farbig im Bild an.
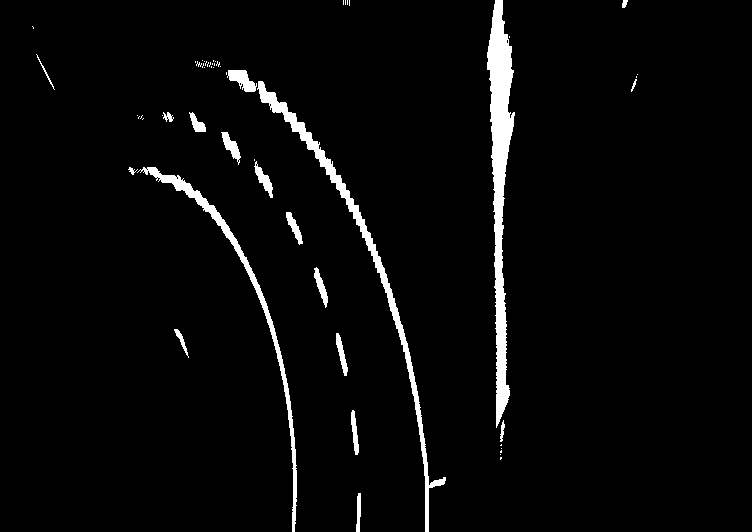
Verifizieren Sie Ihren Segmentierungsalgorithmus mit den Bildern Spurkandidaten F160.png und Spurkandidaten F350.png.
Arbeitsergebnis: Segmentierung der X-Y-Daten der rechten Fahrspuren für die unterschiedlichen Eingangsdateien mit dem Skript segmentiereFahrbahnmarkierung.m.
Nutzen Sie bwlabel um zusammenhängende Gebiete segmentieren.
Wählen Sie das räumlich nächste Segment rechts der Bildmitte (376,531).
Speichern Sie das Segment als Maske in eine mat-Datei.
Färben Sie mit der Maske Ihr Ergebnis ein.
Tipp
Musterlösung
Abb. 6: Segmentierung der Fahrspuren
Aufgabe 9.3: Spurpolynom
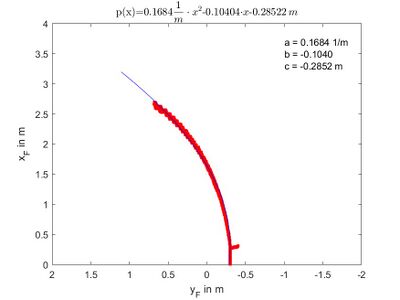
Abb. 7: Darstellung der Fahrspuren als Polynom
Bestimmen Sie für die rechte Fahrbahnmarkierungen das Spurpolynome 2. Ordnung mit polyfit.
Ersetzen Sie polyfit durch die einfache Polynomapproximation interpoliere_weg.m.
Berechnen Sie aus dem Spurpolynom die rechte Fahrbahnmarkierungen.
Blenden Sie die rechte Fahrbahnmarkierungen im Videobild für die Bildframes 40, 160 und 350 ein.







{kind=link}
{kind=link}
{kind=link}