SDE WS25: AP 2.4 Messung der Ist-Position mittels Topcon Robotic Total Station

Autor: Jan Steffens
Einleitung
In diesem Arbeitspaket wird die Ist-Position des Prismas mit der Topcon Robotic Total Station gemessen (Ap. 2.4), die Meswerte geglättet (Ap 2.5), der Kurs geschätzt (AP 2.6) und die Roboterpose in der bestehenden Karte in Welt-Koordinaten (W-KOS) eingetragen (AP 2.7).
Die Roboterpose dient der Analyse der Regelung.
Anforderungen
| Req. | Beschreibung | Priorität |
|---|---|---|
| 1 | Als Referenzmessystem muss die Topcon Robotic Total Station via Bluetooth zum Einsatz kommen. | 1 |
| 2 | Die Messwerte müssen aus dem Sensor-KOS (T-KOS) in das Welt-KOS (W-KOS) transformiert werden. | 1 |
| 3 | Die Messwerte müssen in die Karte Rundkurs.mat im W-KOS eingetragen werden. |
1 |
| 4 | Die Messwerte müssen für eine Spätere Anzeige/Analyse gespeichert werden (z. B. 251209_HHMM_AlphaBot). |
1 |
| 5 | Das MATLAB®-Skript zeichneMessungInKarte ermöglicht die Auswahl einer Testfahrt via uigetfile und visualisiert die Aufzeichnung (z. B. 251209_HHMM_AlphaBot) in der Karte Rundkurs.mat. |
1 |
| 6 | Das Vorgehen muss am KANBAN-Board geplant und verfolgt werden. | 1 |
| 7 | Lösungsweg und Lösung müssen in diesem Wiki-Artikel dokumentiert werden. | 1 |
| 8 | Als Software muss MATLAB® eingesetzt werden. | 1 |
| 9 | Alle Daten müssen im Ordner https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Software/AlphaBot/Daten abgelegt werden. |
1 |
| 10 | Die Teilmodule müssen gemäß Abb. 1 im Skript starteAlphaBotMapping.m implementiert werden. |
1 |
Software-Architektur
-
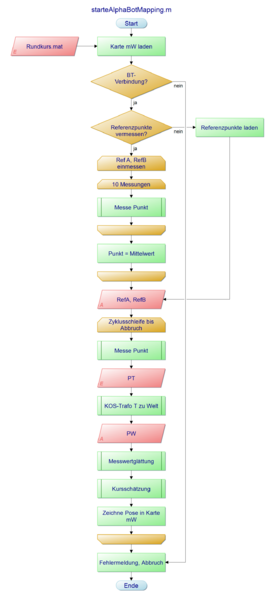 Abb. 2: Gesamter PAP für Darstellungsseite
Abb. 2: Gesamter PAP für Darstellungsseite -
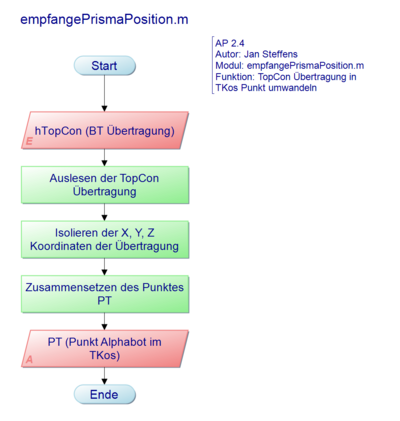 Abb. 3: PAP für empfangePrismaPosition.m
Abb. 3: PAP für empfangePrismaPosition.m


Umsetzung
SVN-Links:
Modultest empfangePrismaPosition.m
Für den Modultest wird eine TopCon Übertragung simuliert. Dazu wird ein String mit Koordinaten, wie die TopCon Station ihn versendet an empfangePrismaPosition.m übergeben und auf die Richtigkeit der Koordinaten getestet.
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | TopCon Nachricht wird eingelesen | 'Ed 0000,0,0.0000,5,0.14,-0.37,-0.07' | TopCon Nachricht wird eingelesen | TopCon Nachricht wird eingelesen | Jan Steffens | 06.01.26 |
| 2 | Nachricht wird an empfangePrismaPosition.m übergeben | 'Ed 0000,0,0.0000,5,0.14,-0.37,-0.07' | Nachricht wird übergeben | Nachricht wird übergeben | Jan Steffens | 06.01.26 |
| 3 | Richtigkeit der Koordinaten | [0.14;-0.37;0.0] | [0.14;-0.37;0.0] | Jan Steffens | 06.01.26 |
-
 Abb. 2: Testergebnis für TestEmpfangePrismaPosition.m
Abb. 2: Testergebnis für TestEmpfangePrismaPosition.m

Modultest leseReferenzpunkte.m
Für den Modultest wird eine TopCon Übertragung simuliert. Dazu wird ein String mit Koordinaten, wie die TopCon Station ihn versendet an leseReferenzpunkte.m übergeben und auf die Richtigkeit der Koordinaten getestet.
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | simulierte TopCon Nachricht wird eingelesen | 'Ed 0000,0,0.0000,5,1.50,2.30,0.0' | TopCon Nachricht wird eingelesen | TopCon Nachricht wird eingelesen | Jan Steffens | 11.01.26 |
| 2 | Nutzereingabe für Bestätigung nötig | Ja! oder Nein | Ja!, sodass Punkt ausgelesen werden kann | Punkt wird ausgelesen | Jan Steffens | 11.01.26 |
| 3 | messeReferenzPunkt.m bildet Mittelwert | je 10 Punkt-Messungen | messeReferenzPunkt.m wird aufgerufen | Mittelwert wird gebildet | Jan Steffens | 11.01.26 |
| 4 | B und B_Soll | [1.50, 2.30, -0.07] | [1.50, 2.30, -0.07] | Jan Steffens | 11.01.26 |
-
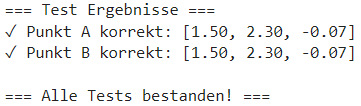 Abb. 2: Testergebnis für TestleseReferenzpunkte.m
Abb. 2: Testergebnis für TestleseReferenzpunkte.m

→ zurück zum Hauptartikel: Spurverfolgung mit Kamera