Workshop 2 - SenGier/SabGier - Gruppe 3 - SoSe2024: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| Zeile 86: | Zeile 86: | ||
Das Signal der Lenkwinkel werden durch Eingang ''SenGier_psip_roh_ADC_f64'' in Simulink SenGier - Gierrate von dSPACE RT1104 eingelest. Durch die Umwandlungsmodell wird die Einheit des Lenkwinkels von Degree in Rad umgewandelt, und durch den Ausgang ''SenGier_psip_roh_K_f64'' in den Simulink SabGier - Gierrate geschickt. | Das Signal der Lenkwinkel werden durch Eingang ''SenGier_psip_roh_ADC_f64'' in Simulink SenGier - Gierrate von dSPACE RT1104 eingelest. Durch die Umwandlungsmodell wird die Einheit des Lenkwinkels von Degree in Rad umgewandelt, und durch den Ausgang ''SenGier_psip_roh_K_f64'' in den Simulink SabGier - Gierrate geschickt. | ||
Das Rohwert der Offsetsensor werden durch Eingang ''SenGier_psip_OffsetSensorrohwert_f64'' von dSPACE RT1104 eingelest. | Das Rohwert der Offsetsensor werden durch Eingang ''SenGier_psip_OffsetSensorrohwert_f64'' von dSPACE RT1104 eingelest. | ||
== Aufgabe 2.4: Darstellung der Messergebnisse == | |||
Version vom 1. Mai 2024, 13:33 Uhr
Autoren: Xiangyao Liu & Yuhan Pan & Yunkai Lin
Messkette
-
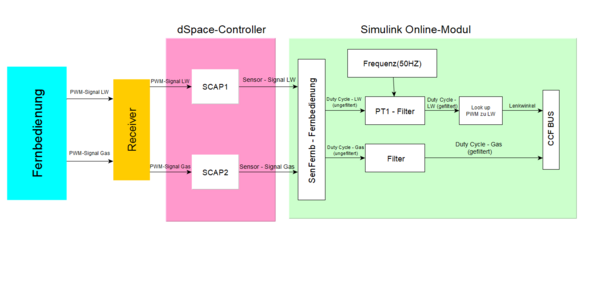
Abbildung 1: Messkette-Fernbedienung

Sensorblock - SenFernb

Das von der Fernbedienung empfangene Signal wird in diesem Simulink Modul SenFernb-block verarbeitet,das im Abb.1 mit einem roten Rahmen makiert ist. Durch die Darstellung in Simulink ist das zu erkennen,dass das von dSpace empfangene Signal direkt an den Sensorblock gesendet wird. Im diese SenFernb Block werden das Signal von Fernbedienung im 2 Teile der Lenkwinkel- und Gaspedal-Signal jeweils verarbeitet. Das Eingangssignal SenRti_PwmBreiteLw_f64 ist ein Pulsweitenmoduliertes Signal, was mit einer Frequenz 50 Hz und PT1 Filter gefiltert wird. Das gefilterte Signal wird durch den Look up Funktion in einen Winkel zuordnet, und durch Ausgang 11 geschickt. Und das gefilterte Signal würde auch durch Ausgang 1 direkt in AKT-Block geschickt.Das gefilterte Signal wird auch durch den Checks_Drange Block geleitet und mit SenFernbR_LwEingriff_maxPulsweite_f64h und SenFernbR_LwEingriff_minPulsweite_f64h verglichen, um zu überprüfen, ob es sich innerhalb des angegebenen Bereichs befindet. Das überprüfte Signal wird SenFernb_CheckLw_bit genannt und wird über den Ausgang 8 an das AKT-Modul ausgegeben.
Das Eingangssignal SenRti_PwmBreiteGas_f64 ist auch ein Pulsweitenmoduliertes Signal und übermittelt die Gaspedalstellung von Fernbedienung. Es wurde direkt in Ausgang 10 geschickt und als Filterungssignal in AKT-Block geschickt.Das Signal SenRti_PwmBreiteGas_f64 wird ebenfalls durch den "Checks_Drange" Block geleitet und mit SenFernbR_GasEingriff_maxPulsweite_f64h und SenFernbR_GasEingriff_minPulsweite_f64h verglichen, um zu überprüfen, ob es sich innerhalb des angegebenen Bereichs befindet. Das überprüfte Signal wird SenFernb_Gas_bit genannt und wird über den Ausgang 5 an das AKT-Modul ausgegeben.
Das Signal SenRti_PwmFLw_f64 ist ein Frequenzmodulationssignal. Es wird durch einen Verstärkungsblock mit einem Verstärkungsfaktor von 1 geleitet und über den Ausgang 12 an das AKT-Modul ausgegeben. Es wird auch durch den Checks_Srange Block geleitet und nach Überprüfung, ob es sich im angegebenen Bereich befindet, wird das überprüfte Signal SenFernb_CheckFreqLw_bit genannt und über den Ausgang 9 an das AKT-Modul ausgegeben.
Das Signal SenRti_PwmFGas_f64 ist ebenfalls ein Frequenzmodulationssignal. Es wird durch einen Verstärkungsblock mit einem Verstärkungsfaktor von 1 geleitet und über den Ausgang 7 an das AKT-Modul ausgegeben. Es wird auch durch den Checks_Srange Block geleitet und nach Überprüfung, ob es sich im angegebenen Bereich befindet, wird das überprüfte Signal SenFernb_Freq_bit genannt und über den Ausgang 6 an das AKT-Modul ausgegeben.
SenFernb_CheckLw_bit-Signal und SenFernb_CheckFreqLw_bit-Signal werden gemeinsam durch einen NAND-Logikblock geleitet, um das SenFernb_LwFernbEin_bit-Signal zu bilden, das dann über den Ausgang 2 zum AKT-Modul ausgegeben wird.
SenFernb_Gas_bit-Signal und SenFernb_Freq_bit-Signal werden gemeinsam durch einen NAND-Logikblock geleitet, um das SenFernb_GasFernbEin_bit-Signal zu bilden, das dann über den Ausgang 3 zum AKT-Modul ausgegeben wird.
-
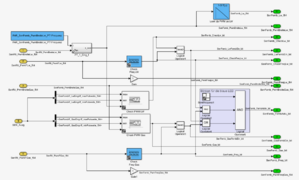
Abbildung 3: SenFernb - Fernbedienung

Aufgabe 2.3: Messung am Fahrzeug


| Eingänge | Ausgänge |
|---|---|
| SenGier_psip_roh_ADC_f64 | SenGier_psip_roh_K_f64 |
| SenGier_psip_OffsetSensorrohwert_f64 |
| Eingänge | Ausgänge |
|---|---|
| SenGier_psip_roh_K_f64 | SabGier_psip_filt_K_f64 |
| SenTast_AEP_bit | SabGier_psi_filt_K_f64 |
| SenTast_BSF_Rundk_bit | SabGier_psip_unfilt_K_f64 |
| SenTast_BSF_RundkHindernis_bit | SabGier_psip_offset_K_f64 |
| SenGier_psip_roh_K_f64 | SabGier_Reset_bit |
| SenTast_Reset_bit |
| Nr. | Lenkwinkel | Gas | Zeit in s |
|---|---|---|---|
| 1 | +7° (links) | 0,8 | 10,49 11,02 10,16 10,82 11,08 |
| 2 | +7° (links) | 0,9 | 07,88 07,71 08,20 |
| 3 | -7° (rechts) | 0,8 | 10,46 10,33 10,95 10,87 11,38 |
| 4 | -7° (rechts) | 0,9 | 08,60 08,38 08,56 08,67 |
SVN-Ordner: https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Daten/Gierrate/Gruppe3/
Das Signal der Lenkwinkel werden durch Eingang SenGier_psip_roh_ADC_f64 in Simulink SenGier - Gierrate von dSPACE RT1104 eingelest. Durch die Umwandlungsmodell wird die Einheit des Lenkwinkels von Degree in Rad umgewandelt, und durch den Ausgang SenGier_psip_roh_K_f64 in den Simulink SabGier - Gierrate geschickt. Das Rohwert der Offsetsensor werden durch Eingang SenGier_psip_OffsetSensorrohwert_f64 von dSPACE RT1104 eingelest.