Workshop 2 - SenGier/SabGier - Gruppe 2 - SoSe2024
Autoren: Philipp Sander & Dennis Fleer
Hauptseite
SDE Praktikum
Termine SoSe-24
Lernzielkontrolle 1
Lernzielkontrollfragen 1 / Beschreibung des Lego Mindstorms Gyro-Sensors
Der Gierratensensor misst eine Drehrate diese wird durch die Signalverarbeitung in einen Winkel in Grad° umgewandelt. Genauere Informationen sind nicht angegeben. Kein Datenblatt vorhanden. Das Ausgangssignal des Sensors ist ein Analoges Signal. Dieses Wird von einem A/D-Wandler in ein digitales Signal umgewandelt. Dieses Signal wird weiterhin von der Signalaufbereitung verarbeitet, sodass wir am Ende eine gefilterte Gierrate und einen gefilterten Gierwinkel erhalten.
Lernzielkontrollfragen 2 / Signalverarbeitung und Messkette
Offline
-
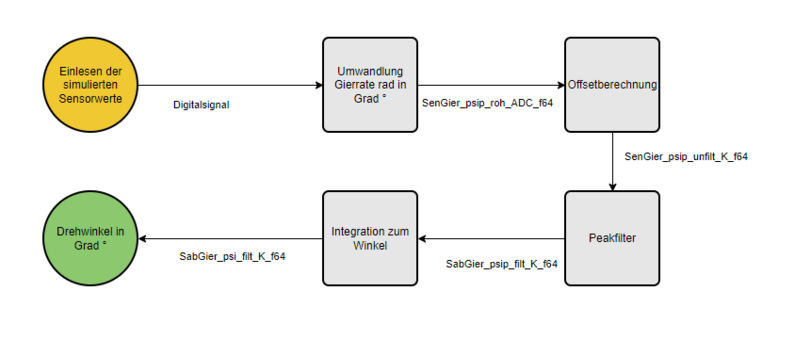
Abbildung 1: Messkette Gyro-Sensor im Offline Simulink Modell.

-
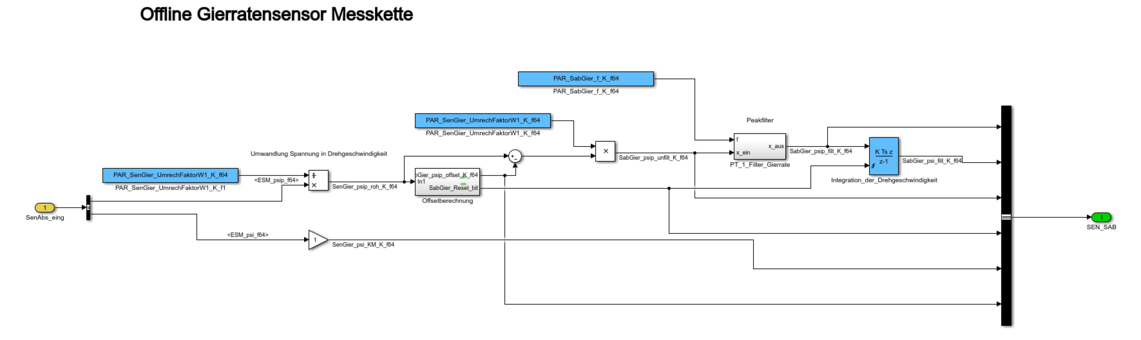
Abbildung 2: Messkette Gyro-Sensor im Offline Simulink Modell als Auszug aus dem Gesamtmodell.

Im offline Modell werden die Daten der simulierten Gierrate direkt auf den Bus gelegt und dann in dem Funktionsblock Sensoraufbereitung weiterverarbeitet, in diesem finden dann dieselben Schritte wie im Online Modell statt, dass im Folgenden erläutert wird.
Online
-
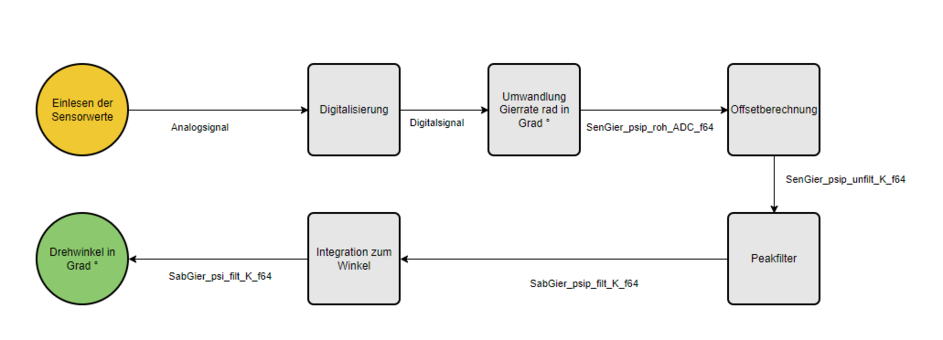
Abbildung 3: Messkette Gyro-Sensor im Online Simulink Modell.

-
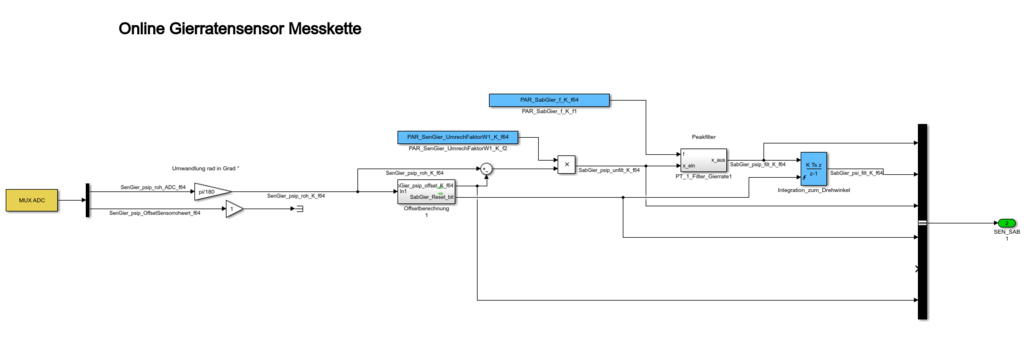
Abbildung 4: Messkette Gyro-Sensor im Online Simulink Modell als Auszug aus dem Gesamtmodell.

Die Spannungen werden zuerst mit dem AD Wandler der DSpace 1104 Karte eingelesen und digitalisiert. Anschließend wird das Signal mithilfe eines weiteren Blocks von Grad in rad umgerechnet. In der weiteren Signalaufbereitung wird das Signal der Gierrate in eine Offsetberechnung eingeleitet sowie durch einen PT1-Filter geglättet und mithilfe einer Integration erhalten wir den Gierwinkel.
Anschließend werden die Signale in den Sensorbus gelegt, von dem aus die Signale zur Weiterverarbeitung und für die Ansteuerung der Aktoren oder Regelung verwendet werden.
Lernzielkontrollfragen 3 / Vergleich I/O
| Online | Offline |
|---|---|
| SenGier_psip_OffsetSensorrohwert_f64 | EMS_psip_f64 |
| SenGier_psip_roh_ADC_f64 | ESM_psi_f64 |
| Online | Offline |
|---|---|
| SabGier_psip_offset_K_f64 | SabGier_psip_offset_K_f64 |
| SabGier_psip_unfilt_K_f64 | SabGier_psip_unfilt_K_f64 |
| SabGier_psi_filt_K_f64 | SabGier_psi_filt_K_f64 |
| SabGier_Reset_bit | SabGier_Reset_bit |
| SabGier_psip_filt_K_f64 | SabGier_psip_filt_K_f64 |
| SenGier_psi_KM_K_f64 |
Versuchsbeschreibung
Versuchsbeschreibung
In diesem versuch soll der Lego Mindstorms Gyro-Sensor analysiert werden. Dieser ist oberhalb der Lenkachse des zweiten Autos verbaut. Es werden 3 messungen getätigt.
- 1. Messung: Der Sensor wird im Stillstand über 180 Sekunden vermessen und die Messdaten aufgezeichnet. Ein paar Sekunden nach dem Start wird der Sensor kalibriert.
- 2. Messung: Das Auto fährt mit konstanter Geschwindigkeit von 0.6 und einem Konstanten Lenkwinkel von -5, 5 Runden. Ein paar Sekunden nach dem Start wird der Sensor kalibriert. Die Zeit wird für jede Runde separat aufgenommen.
- 3. Messung: Das Auto fährt mit konstanter Geschwindigkeit von 0.6 und einem Konstanten Lenkwinkel von 20, 5 Runden. Ein paar Sekunden nach dem Start wird der Sensor kalibriert. Die Zeit wird für jede Runde separat aufgenommen.
Die Messdaten, sowie Referenzdaten werden in \Daten\Gierrate\240502_Links_Rechtskurve gespeichert.
Aufgenommene Signale:
| Nr | Variablen |
|---|---|
| 1 | Zeit |
| 2 | SenGier_psip_roh_ADC_f64 |
| 3 | SenGier_psip_roh_K_f64 |
| 4 | SenGier_psip_OffsetSensorrohwert_f64 |
| 5 | SabGier_psip_offset_K_f64 |
| 6 | SabGier_psip_unfilt_K_f64 |
| 7 | SabGier_psip_filt_K_f64 |
| 8 | SenGier_psi_reset_bit |
| 9 | SabGier_Reset_bit |
| 10 | SabGier_psi_filt_K_f64 |
| 11 | SabGier_psi_filt_K_deg_f64 |
Messdatenanalyse
Stillstand
-
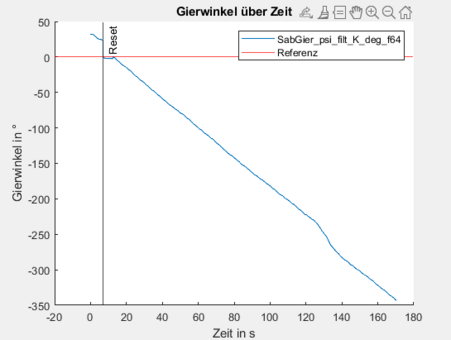
Gierwinkel im Stillstand.

-
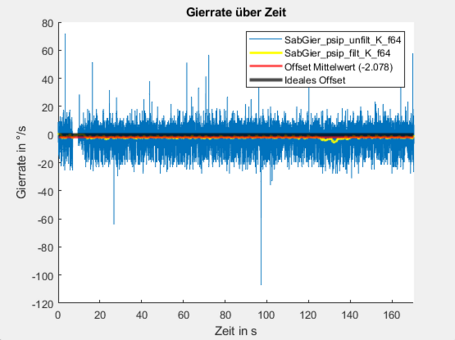
Gierrate im Stillstand.
