Workshop 2 - SenGier/SabGier - Gruppe 2 - SoSe2024: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (7 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 5: | Zeile 5: | ||
[https://wiki.hshl.de/wiki/index.php/SoSe24_-_Praktikum_Systementwurf_-_Lernzielkontrolle_1 Lernzielkontrolle 1]<br/> | [https://wiki.hshl.de/wiki/index.php/SoSe24_-_Praktikum_Systementwurf_-_Lernzielkontrolle_1 Lernzielkontrolle 1]<br/> | ||
== Beschreibung == | == Lernzielkontrollfragen 1 / Beschreibung des Lego Mindstorms Gyro-Sensors == | ||
Der Gierratensensor misst eine Drehrate diese wird durch die Signalverarbeitung in einen Winkel in Grad° umgewandelt. | Der Gierratensensor misst eine Drehrate diese wird durch die Signalverarbeitung in einen Winkel in Grad° umgewandelt. Genauere Informationen sind nicht angegeben. Kein Datenblatt vorhanden. | ||
Das Ausgangssignal des Sensors ist ein Analoges Signal. Dieses Wird von einem A/D-Wandler in ein digitales Signal umgewandelt. Dieses Signal wird weiterhin von der Signalaufbereitung verarbeitet, sodass wir am Ende eine gefilterte Gierrate und einen gefilterten Gierwinkel erhalten. | |||
== | == Lernzielkontrollfragen 2 / Signalverarbeitung und Messkette== | ||
<h3> Offline </h3> | <h3> Offline </h3> | ||
<gallery widths="1600" heights="340"> | <gallery widths="1600" heights="340"> | ||
| Zeile 28: | Zeile 29: | ||
</gallery> | </gallery> | ||
==Vergleich I/O== | ==Lernzielkontrollfragen 3 / Vergleich I/O== | ||
{| class="wikitable" | {| class="wikitable" | ||
| Zeile 57: | Zeile 58: | ||
| || SenGier_psi_KM_K_f64 | | || SenGier_psi_KM_K_f64 | ||
|} | |} | ||
== Versuchsbeschreibung == | |||
=== Versuchsbeschreibung === | |||
In diesem versuch soll der Lego Mindstorms Gyro-Sensor analysiert werden. Dieser ist oberhalb der Lenkachse des zweiten Autos verbaut. Es werden 3 messungen getätigt. | |||
* 1. Messung: Der Sensor wird im Stillstand über 180 Sekunden vermessen und die Messdaten aufgezeichnet. Ein paar Sekunden nach dem Start wird der Sensor kalibriert. | |||
* 2. Messung: Das Auto fährt mit konstanter Geschwindigkeit von 0.6 und einem Konstanten Lenkwinkel von -5, 5 Runden. Ein paar Sekunden nach dem Start wird der Sensor kalibriert. Die Zeit wird für jede Runde separat aufgenommen. | |||
* 3. Messung: Das Auto fährt mit konstanter Geschwindigkeit von 0.6 und einem Konstanten Lenkwinkel von 20, 5 Runden. Ein paar Sekunden nach dem Start wird der Sensor kalibriert. Die Zeit wird für jede Runde separat aufgenommen. | |||
Die Messdaten, sowie Referenzdaten werden in \Daten\Gierrate\240502_Links_Rechtskurve gespeichert. | |||
=== Aufgenommene Signale: === | |||
{|class="wikitable" | |||
! style="font-weight: bold;"|Nr | |||
! style="font-weight: bold;"|Variablen | |||
|- | |||
|1 | |||
|Zeit | |||
|- | |||
|2 | |||
|SenGier_psip_roh_ADC_f64 | |||
|- | |||
|3 | |||
| SenGier_psip_roh_K_f64 | |||
|- | |||
|4 | |||
| SenGier_psip_OffsetSensorrohwert_f64 | |||
|- | |||
|5 | |||
|SabGier_psip_offset_K_f64 | |||
|- | |||
|6 | |||
|SabGier_psip_unfilt_K_f64 | |||
|- | |||
|7 | |||
|SabGier_psip_filt_K_f64 | |||
|- | |||
|8 | |||
|SenGier_psi_reset_bit | |||
|- | |||
|9 | |||
|SabGier_Reset_bit | |||
|- | |||
|10 | |||
|SabGier_psi_filt_K_f64 | |||
|- | |||
|11 | |||
|SabGier_psi_filt_K_deg_f64 | |||
|- | |||
|} | |||
== Messdatenanalyse == | |||
===Stillstand=== | |||
===Linkskurve=== | |||
===Rechtskurve=== | |||
Version vom 8. Mai 2024, 11:52 Uhr
Autoren: Philipp Sander & Dennis Fleer
Hauptseite
SDE Praktikum
Termine SoSe-24
Lernzielkontrolle 1
Lernzielkontrollfragen 1 / Beschreibung des Lego Mindstorms Gyro-Sensors
Der Gierratensensor misst eine Drehrate diese wird durch die Signalverarbeitung in einen Winkel in Grad° umgewandelt. Genauere Informationen sind nicht angegeben. Kein Datenblatt vorhanden. Das Ausgangssignal des Sensors ist ein Analoges Signal. Dieses Wird von einem A/D-Wandler in ein digitales Signal umgewandelt. Dieses Signal wird weiterhin von der Signalaufbereitung verarbeitet, sodass wir am Ende eine gefilterte Gierrate und einen gefilterten Gierwinkel erhalten.
Lernzielkontrollfragen 2 / Signalverarbeitung und Messkette
Offline
-
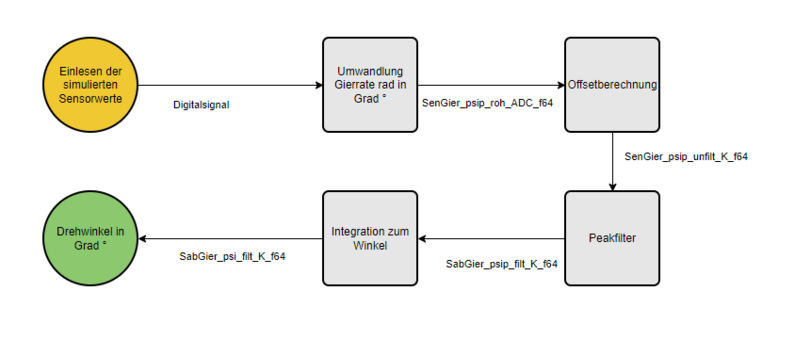
Abbildung 1: Messkette Gyro-Sensor im Offline Simulink Modell.

-
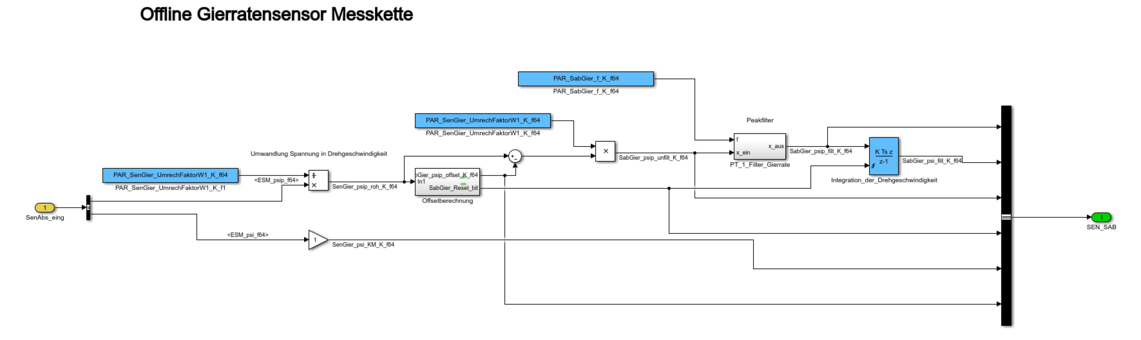
Abbildung 2: Messkette Gyro-Sensor im Offline Simulink Modell als Auszug aus dem Gesamtmodell.

Online
-
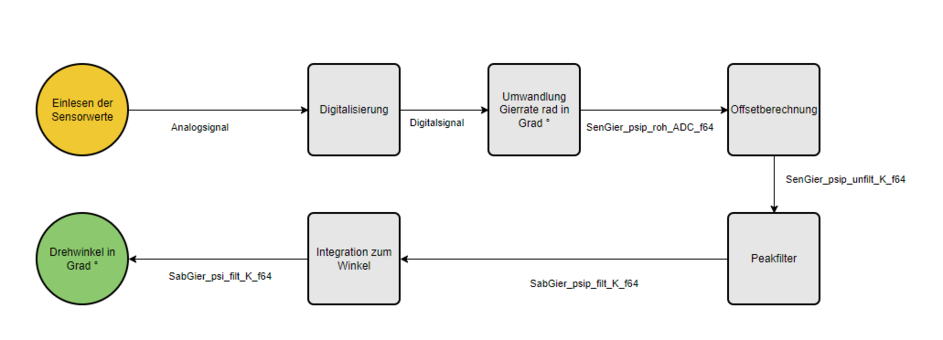
Abbildung 3: Messkette Gyro-Sensor im Online Simulink Modell.

-
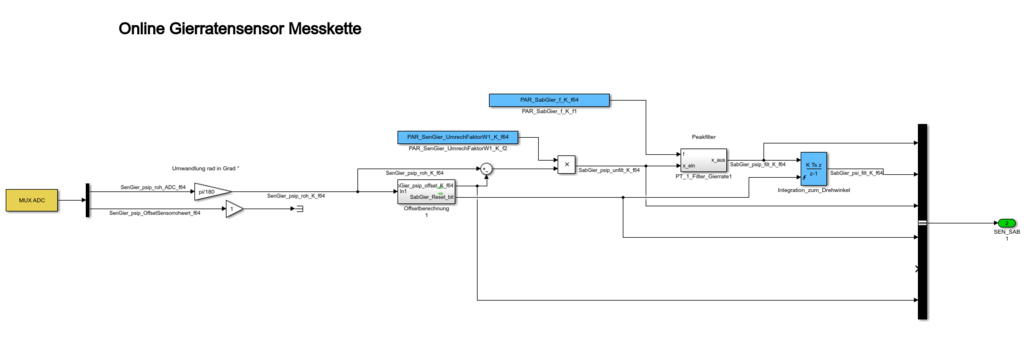
Abbildung 4: Messkette Gyro-Sensor im Online Simulink Modell als Auszug aus dem Gesamtmodell.

Lernzielkontrollfragen 3 / Vergleich I/O
| Online | Offline |
|---|---|
| SenGier_psip_OffsetSensorrohwert_f64 | EMS_psip_f64 |
| SenGier_psip_roh_ADC_f64 | ESM_psi_f64 |
| Online | Offline |
|---|---|
| SabGier_psip_offset_K_f64 | SabGier_psip_offset_K_f64 |
| SabGier_psip_unfilt_K_f64 | SabGier_psip_unfilt_K_f64 |
| SabGier_psi_filt_K_f64 | SabGier_psi_filt_K_f64 |
| SabGier_Reset_bit | SabGier_Reset_bit |
| SabGier_psip_filt_K_f64 | SabGier_psip_filt_K_f64 |
| SenGier_psi_KM_K_f64 |
Versuchsbeschreibung
Versuchsbeschreibung
In diesem versuch soll der Lego Mindstorms Gyro-Sensor analysiert werden. Dieser ist oberhalb der Lenkachse des zweiten Autos verbaut. Es werden 3 messungen getätigt.
- 1. Messung: Der Sensor wird im Stillstand über 180 Sekunden vermessen und die Messdaten aufgezeichnet. Ein paar Sekunden nach dem Start wird der Sensor kalibriert.
- 2. Messung: Das Auto fährt mit konstanter Geschwindigkeit von 0.6 und einem Konstanten Lenkwinkel von -5, 5 Runden. Ein paar Sekunden nach dem Start wird der Sensor kalibriert. Die Zeit wird für jede Runde separat aufgenommen.
- 3. Messung: Das Auto fährt mit konstanter Geschwindigkeit von 0.6 und einem Konstanten Lenkwinkel von 20, 5 Runden. Ein paar Sekunden nach dem Start wird der Sensor kalibriert. Die Zeit wird für jede Runde separat aufgenommen.
Die Messdaten, sowie Referenzdaten werden in \Daten\Gierrate\240502_Links_Rechtskurve gespeichert.
Aufgenommene Signale:
| Nr | Variablen |
|---|---|
| 1 | Zeit |
| 2 | SenGier_psip_roh_ADC_f64 |
| 3 | SenGier_psip_roh_K_f64 |
| 4 | SenGier_psip_OffsetSensorrohwert_f64 |
| 5 | SabGier_psip_offset_K_f64 |
| 6 | SabGier_psip_unfilt_K_f64 |
| 7 | SabGier_psip_filt_K_f64 |
| 8 | SenGier_psi_reset_bit |
| 9 | SabGier_Reset_bit |
| 10 | SabGier_psi_filt_K_f64 |
| 11 | SabGier_psi_filt_K_deg_f64 |