Schritt-für-Schritt-Anleitung zur Inbetriebnahme des autonomen Fahrzeugs: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 14: | Zeile 14: | ||
## Bei beiden PCs mit .\HSHL-User und Kennwort1 anmelden | ## Bei beiden PCs mit .\HSHL-User und Kennwort1 anmelden | ||
## Sicherstellen: Fahrzeug ist aufbebockt, Räder und Lenkung kann sich frei bewegen | ## Sicherstellen: Fahrzeug ist aufbebockt, Räder und Lenkung kann sich frei bewegen | ||
## | ## "dSPACE ControlDesk 7.1" starten | ||
## Experiment "CaroloCup Fahrzeug Inbetriebnahme" öffnen | |||
## "Go Online" und "Start Measuring" betätigen | |||
## Spurerkennung starten: SVN\Software\OSE_Draufsicht_Spurpolynom_RS232\Release\OSE_Draufsicht_Spurpolynom_RS232.exe starten | |||
## Check: Läuft das Modell (Überprüfung des "alive counter") | ## Check: Läuft das Modell (Überprüfung des "alive counter") | ||
## VNC-Verbindung herstellen per TightVNC, Details siehe [[UltraVNC]] | ## VNC-Verbindung herstellen per TightVNC, Details siehe [[UltraVNC]] | ||
| Zeile 21: | Zeile 24: | ||
## Einschalten | ## Einschalten | ||
# Sensor-Schnelltest | # Sensor-Schnelltest | ||
## | ## ABC empfangen? | ||
## | |||
# Aktor-Schnelltest | # Aktor-Schnelltest | ||
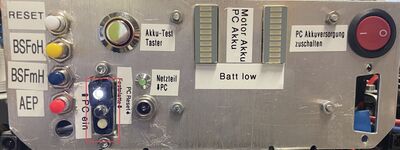
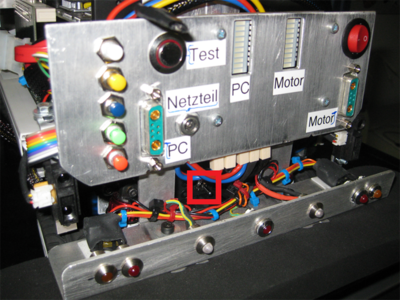
## Motor des Fahrzeugs einchalten: Silbernen Kippschalter (versteckt hinter/unter dem PowerPanel) in nachfolgender Abbildung in die rechte Stellung gestellt werden. Bei Linksstellung ist die Ansteuerung unterbrochen. [[Datei:Kippschalter_Motoransteuerung.png|400px|Bild fehlt noch: silberner Kippschalter hinter dem Panel]] | ## Motor des Fahrzeugs einchalten: Silbernen Kippschalter (versteckt hinter/unter dem PowerPanel) in nachfolgender Abbildung in die rechte Stellung gestellt werden. Bei Linksstellung ist die Ansteuerung unterbrochen. [[Datei:Kippschalter_Motoransteuerung.png|400px|Bild fehlt noch: silberner Kippschalter hinter dem Panel]] | ||
Version vom 8. April 2024, 10:06 Uhr
Diese Anleitung zeigt in möglichst knapper Form, wie das Fahrzeug zum Arbeiten eingeschaltet und am Ende wieder ausgeschaltet wird.
Temporär: Übernahme/Verarbeitung von Daten aus Inbetriebnahme_Tests.docx
Einschalten
- Router einschalten (über den Hauptschalter an der Tisch-Konsole)
- Akkus
- Akku-Ladestand per Multimeter prüfen (Soll-Spannung 7,4-8,2V, Differenz zwischen den Zellen eines Akkus max. 5mV), Details im Artikel Akkus ins Auto einsetzen und Akku Aufladen
- Akkus einsetzen
- PC
- Simulations-PC starten
- Fzg. PC mit dem Netzteil verbinden und über schwarzen Taster am PowerPanel des Fahrzeugs starten.
- Bei beiden PCs mit .\HSHL-User und Kennwort1 anmelden
- Sicherstellen: Fahrzeug ist aufbebockt, Räder und Lenkung kann sich frei bewegen
- "dSPACE ControlDesk 7.1" starten
- Experiment "CaroloCup Fahrzeug Inbetriebnahme" öffnen
- "Go Online" und "Start Measuring" betätigen
- Spurerkennung starten: SVN\Software\OSE_Draufsicht_Spurpolynom_RS232\Release\OSE_Draufsicht_Spurpolynom_RS232.exe starten
- Check: Läuft das Modell (Überprüfung des "alive counter")
- VNC-Verbindung herstellen per TightVNC, Details siehe UltraVNC
- Fernbedienung
- Akkus einlegen
- Einschalten
- Sensor-Schnelltest
- ABC empfangen?
- Aktor-Schnelltest
- Motor des Fahrzeugs einchalten: Silbernen Kippschalter (versteckt hinter/unter dem PowerPanel) in nachfolgender Abbildung in die rechte Stellung gestellt werden. Bei Linksstellung ist die Ansteuerung unterbrochen.
- Gas geben per "slider" in ControlDesk
- Lenken per "slider" in ControlDesk
- Motor des Fahrzeugs einchalten: Silbernen Kippschalter (versteckt hinter/unter dem PowerPanel) in nachfolgender Abbildung in die rechte Stellung gestellt werden. Bei Linksstellung ist die Ansteuerung unterbrochen.
- Test mit Fahrt auf der Strecke
- Akkus für PC zuschalten: roten Kippschalter am Panel einschalten.

- Akkus für PC zuschalten: roten Kippschalter am Panel einschalten.



Ausschalten
- Fernbedienung
- ausschalten
- Akkus entnehmen, ins Ladegerät zum Laden einlegen
- Akkus laden, Details siehe Akku Aufladen
→ zurück zum Hauptartikel: Praktikum SDE