Automated lane following of a Waveshare JetRacer with artificial intelligence: Unterschied zwischen den Versionen
| Zeile 60: | Zeile 60: | ||
== Programmierung == | == Programmierung == | ||
For the implementation | For the implementation phase, a Jupyter notebook was utilized, and the code was developed in Python since it is extremely user-friendly and permitted direct wifi connectivity between the Windows PC and the Jetracer. A library file for the jetracer already exists. | ||
It has all of the basic functionalities for the jetracer and has been designed. | |||
PC | First, using the Etcher tool, an SD card was produced with a prebuilt image based on the jetpack 4.5 file. This file was obtained from the waveshare website. | ||
has | Installing the jetpack 4.5 file followed. The NVIDIA JetPack software development kit is the most comprehensive instrument for creating apps with artificial intelligence. | ||
First, using the Etcher | The JetPack software development kit is compatible with all Jetson modules and developer kits. The most recent Linux Driver Package for the Linux operating system is included in the JetPack software development kit, together with CUDA-X accelerated libraries and APIs for Deep Learning, Computer Vision, Accelerated Computing, and Multimedia. The software development kit further contains the Linux kernel. | ||
The micro SD card was then inserted into the Jetson nano, and the device is now set to connect to a wifi network using the Jupyter notebook. | |||
Having gotten the IP address via the USB connection, the system is now accessible from the personal computer. After successfully login in, the Jupyter notebooks' code will be available and can be modified. Following the installation of Python packages, the power mode should be specified. This may be seen on their website in full detail. | |||
the most comprehensive instrument for | First, it was evaluated using a controller that enables the user to manually manipulate the jetracer. | ||
The jetracer comes with this controller. Inside is a file for a simple motion and teleportation notebook, which the controller may use to operate the jetracer. It is advised that the controller be connected to the computer through the jupyter notebook, which then transfers the signal to the jetracer. The controller may be calibrated by utilizing the ipywidgets library. Using the Jupyter notebook, every aspect of the car, including the throttle gain, steering offset, and axes, may be modified. | |||
Linux Driver Package | |||
libraries and APIs for Deep Learning, Computer Vision, Accelerated Computing, and | |||
Multimedia. | |||
and the device is now | |||
now | |||
be | |||
First, it was | |||
motion and teleportation notebook, which | |||
jetracer. It is | |||
may be | |||
== Komponententest == | == Komponententest == | ||
Version vom 5. Januar 2023, 08:42 Uhr
Autor: Tasawar Siddiquy
Art: Bachelorarbeit
Dauer: 14.09.2022 -
Betreuer: Prof. Schneider
Aufgabenstellung
- Mechanischer und elektrischer Aufbau eines JetRacers
- Literaturrecherche zu den verfügbaren Programmierumgebungen
- Vergleich und Auswahl einer passenden Programmierumgebung
- Einarbeitung in die Programmierumgebung
- Anlernen des Deep Learning Netzwerkes zur Spurführung
- Modul und Systemtests mit dem JetRacer auf der Fahrbahn
- Ergebnisdarstellung und Ausblick
- Dokumentation des Umgang mit dem JetRacer im HSHL Wiki
- Bereitstellung von Demoprogrammen zum einfachen Einstieg
- Dokumentation nach wissenschaftlichem Stand
Anforderungen an die wissenschaftliche Arbeit
- Wissenschaftliche Vorgehensweise (Projektplan, etc.), nützlicher Artikel: Gantt Diagramm erstellen
- Wöchentlicher Fortschrittsberichte (informativ)
- Projektvorstellung im Wiki
- Studentische Arbeiten bei Prof. Schneider
- Anforderungen an eine wissenschaftlich Arbeit
Getting Started
Nutzen Sie diese Artikel, um sich in das Thema einzuarbeiten:
- Wiki-Artikel_schreiben, die Vorlage finden Sie hier: Artikelvorlage
- Regeln zum Umgang mit SVN
- HSHL-Wiki: JetRacer
Nützliche Artikel
- Anleitung zum einfachen Einstieg in ROS2
- Doku des Projektstands WS2021/22
- Sicherer Betrieb eines AMR
- Navigation eines AMR mit ROS2

Projektplan
Anforderungen
Hardwareanforderungen
Softwareanforderungen
Funktionaler Systementwurf / Technischer Systementwurf
Komponentenspezifikation
-
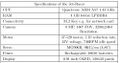
Specifications of the Jet-Racer

Specifications of the Jet-Racer
Programmierung
For the implementation phase, a Jupyter notebook was utilized, and the code was developed in Python since it is extremely user-friendly and permitted direct wifi connectivity between the Windows PC and the Jetracer. A library file for the jetracer already exists. It has all of the basic functionalities for the jetracer and has been designed. First, using the Etcher tool, an SD card was produced with a prebuilt image based on the jetpack 4.5 file. This file was obtained from the waveshare website. Installing the jetpack 4.5 file followed. The NVIDIA JetPack software development kit is the most comprehensive instrument for creating apps with artificial intelligence. The JetPack software development kit is compatible with all Jetson modules and developer kits. The most recent Linux Driver Package for the Linux operating system is included in the JetPack software development kit, together with CUDA-X accelerated libraries and APIs for Deep Learning, Computer Vision, Accelerated Computing, and Multimedia. The software development kit further contains the Linux kernel. The micro SD card was then inserted into the Jetson nano, and the device is now set to connect to a wifi network using the Jupyter notebook. Having gotten the IP address via the USB connection, the system is now accessible from the personal computer. After successfully login in, the Jupyter notebooks' code will be available and can be modified. Following the installation of Python packages, the power mode should be specified. This may be seen on their website in full detail. First, it was evaluated using a controller that enables the user to manually manipulate the jetracer. The jetracer comes with this controller. Inside is a file for a simple motion and teleportation notebook, which the controller may use to operate the jetracer. It is advised that the controller be connected to the computer through the jupyter notebook, which then transfers the signal to the jetracer. The controller may be calibrated by utilizing the ipywidgets library. Using the Jupyter notebook, every aspect of the car, including the throttle gain, steering offset, and axes, may be modified.
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
YouTube Video
Das Video von diesem Projekt finden Sie auf Youtube unter dem Link:
Weblinks
Literatur
→ zurück zum Hauptartikel: Studentische Arbeiten