Messaufbau mit Arduino: Gyroskop
Author: Syed Rafsan Ishtiaque
Art: Praxissemester
Dauer: 02.05.2023 - 21.08.2023
Betreuer: Prof. Dr.-Ing Ulrich Schneider
Einleitung
Das Gyroskop-Projekt wird es uns ermöglichen, die Daten einer kontinuierlichen Drehung eines Gyroskops zu erfassen und sie zur Analyse an unsere Steuereinheit zu senden. In diesem Projekt werden wir das Gyroskop drehen und seine Daten über einen Schleifring übertragen. Das Hauptaugenmerk des Projekts liegt darauf, die Daten an das DS1104 R&D Controller Board zu senden. Und dafür brauchen wir ein robustes System, das einen Schleifring und einen Encoder enthält. Die größte Herausforderung beim Aufbau des Systems ist die Hardware-Montage. Wir werden uns also mehr darauf konzentrieren.
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Ein Haltebereich für PCB zwischen der Hauptstruktur und der Gyro-Struktur | Marc Ebmeyer | 27.07.2023 | Rafsan | 07.08.2023 |
| 2 | Ein Servomotor (SG 90) zum Drehen des Gyroskops, des Rades des Inkrementalgebers und des Schleifrings | Marc Ebmeyer | 27.07.2023 | ||
| 3 | Einem Inkrementalgeber (FC 03) zur Messung der Drehung des Servomotors (SG 90) und des Gyro (GY 35) | Marc Ebmeyer | 27.07.2023 | ||
| 4 | Ein Gyro (GY 35), der in der gleichen Achse wie das Servo und der Schleifring platziert ist und über einen Draht mit dem Schleifring verbunden ist | Marc Ebmeyer | 27.07.2023 | ||
| 5 | Ein Schleifring (SN M022A-06), der über eine Welle mit dem Servo verbunden ist, um die Daten vom Gyro zu übertragen | Marc Ebmeyer | 27.07.2023 | ||
| 6 | |||||
| 7 | |||||
| 8 |
Funktionaler Systementwurf/Technischer Systementwurf
-
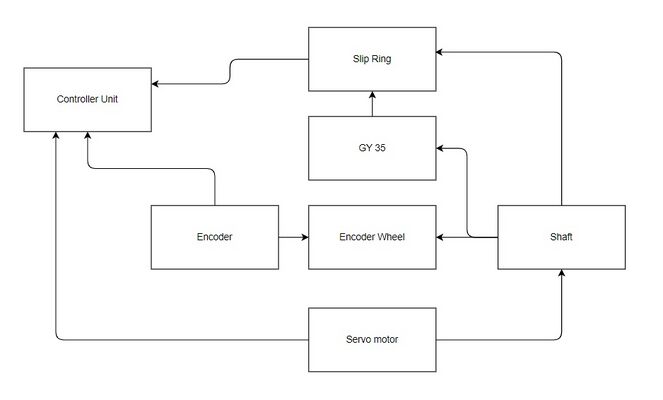 Abb. 2: Dieser Entwurf zeigt die Wechselwirkungen zwischen den Komponenten des Systems
Abb. 2: Dieser Entwurf zeigt die Wechselwirkungen zwischen den Komponenten des Systems

Komponentenspezifikation (Elektronische Komponenten)
Sensor
GY-35-RC one-axial Gyroscope/ Analog ENC-03RC
Der Sensor, den wir verwenden werden, hat die Modellnummer GY-35. Auf ihm ist ein ENC-03RC-Chip montiert. Der GY-35 ist ein einachsiges Gyromodul, das heißt, ein Modul kann nur eine Achse messen. Die Spannungsversorgung beträgt 3 bis 5 V. Die Größe beträgt 10mm × 17.5mm [1] [2]. Eine Alternative zum Sensor GY 35 kann der Sensor MPU 6050 oder GY 521 sein.
Inkrementalgeber (FC 03)
Servo motor
Wir haben den normalen Servomotor, der normalerweise in Arduino-Projekten verwendet wird, so verändert, dass er sich kontinuierlich um 360 Grad drehen kann. Wir verwenden Tower Pro micro servo 9g SG90.
Slip ring
Controller unit (PCB oder Arduino)
Umsetzung (Hardware)
Die Systemgrundlage
Die Hauptbasis des Systems ist der Boden, der alle Komponenten trägt. Sie ist in zwei Teile unterteilt, einer ist der Haltebereich für Servo, Gyro, Encoder und Schleifring. Der andere ist die Erweiterung, die die Leiterplatte aufnimmt. Die Leiterplatte fungiert als Hauptsteuergerät. Wir können auch einen Arduino anstelle der Platine einsetzen.
Der Grund
Der Boden ist der Bereich, in dem sich die Komponenten befinden
PCB-Halter-Verlängerung
Wir haben den vorgesehenen PCB-Erweiterungsbereich. Dieser überbrückt den Leiterplattenhalter und den Hauptkörper des Systems.
-
 Abb. 5: Der wichtigste Aufbewahrungsort für alle Komponenten
Abb. 5: Der wichtigste Aufbewahrungsort für alle Komponenten -
 Abb. 6: Die Verlängerung der Hauptstruktur, die die Leiterplatte hält
Abb. 6: Die Verlängerung der Hauptstruktur, die die Leiterplatte hält


Schleifring-Halter
Der Schleifringhalter ist so konzipiert, dass er den Schleifring auf dem Servo und dem Gy35 in der gleichen Achse hält. Er hat 3 Flügel, die ihn mit der Säule verbinden und einen Haltebereich für den Schleifring.
-
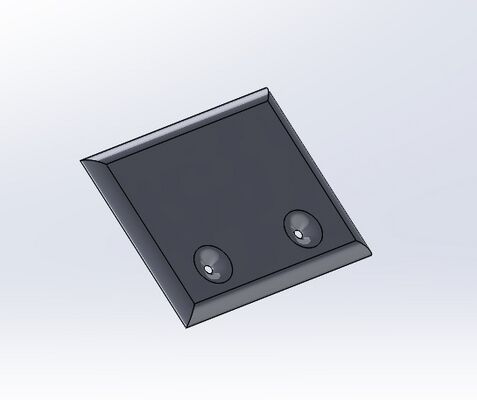 Abb. 7: Der Haltebereich für den Schleifring
Abb. 7: Der Haltebereich für den Schleifring

Tragsäule für Schleifringhalter
Servomotor (SG 90) Halterung
Der Schaft
Schleifring- und Gyroskophalter-Anschluss
Gyroskop (GY 35) Halterung
Servo- und Gyroskophalter-Anschluss
Inkrementalgeber (FC 03) Halterung
Umsetzung (Software)
Programmierung
Link zum Quelltext in SVN
Systemtest
Komponententest
Test im Labor
Projektunterlagen
Projektplan
Produktionskosten pro Einheit (Incomplete)
- Servo motor: Tower Pro Micro Servo 9g SG90 (3 to 5 euro depending buying quantity)
- Gyroscope: GY 35 ENC 03-RC (3 to 5 euro)
- And we can use Adafruit mini slip ring :
- 12 mm, 6 wires = 20 euro apprx.
- 22 mm, 6 wires = 17 euro apprx.
Künftige Entwicklung: LC- und RC-Filter zur Rauschunterdrückung
Wenn der GY35-Sensor mit dem Schleifring verbunden wird, erwarten wir Geräusche (hohe und niedrige Frequenzen), die das System stören können. Um sie zu beseitigen, planen wir die Einführung eines Geräuschunterdrückungssystems. Unser anfänglicher Plan ist es, eine Schaltung oder ein Untersystem mit einem Satz von 3 Kondensatoren und 2 Induktoren auf der GY35-Schleifring-Seite des Hauptsystems zu bauen. Wir werden auch einen ähnlichen Aufbau auf der Schleifring- Arduino Seite des Systems machen. Diese beiden Sätze von Entkopplungskondensatoren werden uns helfen, das Rauschen zu reduzieren und die Stromversorgung zu stabilisieren. Jeder Kondensatorensatz besteht aus einem 0,1 µF, einem 1 µF und einem 10 µF Kondensator. Wir werden Keramikkondensatoren verwenden. Der Kondensator mit dem niedrigsten Wert (0,1 µF) wird in der Nähe des GY35 platziert, um hochfrequente Störungen herauszufiltern. Dann der mittlere (1 µF) und der letzte (10 µF), um das niederfrequente Rauschen herauszufiltern. Wahrscheinlich werden wir die üblichen Keramikkondensatoren verwenden.
Dann haben wir die Spule, zwei davon. Sie werden die hochfrequenten Geräusche zusammen mit den Kondensatoren abstoßen. So entsteht ein LC-Filter zur Rauschunterdrückung. Zunächst wollen wir unser System mit Induktivitäten verschiedener Werte (z. B. zwischen 10 und 100 µH) testen. Diese werden in Reihe mit der Vcc und dem GND geschaltet. Wir schlagen vor, Ferritperlen zu verwenden, da sie sich gut für die Unterdrückung von Hochfrequenzrauschen eignen.
Ein weiterer wichtiger Aspekt ist die Implementierung eines RC-Low-Level-Filters. Es wird das Rauschen vom analogen Ausgang des GY35 beseitigen. Dafür haben wir hauptsächlich ein Paar von ??KΩ-Widerständen und ??nF-Kondensatoren (ca.) gewählt [wir haben die Grenzfrequenzberechnung verwendet, Grenzfrequenz = 1/(2πRC)] oder [Messwert] KΩ-Widerstand und [Messwert] nF-Kondensator (ca.) Diese Werte des Widerstands und des Kondensators des RC-Filters hängen von der Grenzfrequenz ab, die wir erreichen müssen. Für den Kondensator im RC-Filter könnten wir Folienkondensatoren verwenden, da unser Ziel die Filterung des Signals ist und Keramikkondensatoren eine gute Leistung haben.
Zusammenfassung
Literature
→ zurück zum Hauptartikel: Messaufbauten mit Arduino