TeraRanger mit Matlab/Simulink
Autor: Patrick Klauke
Betreuer: Prof. Dr.-Ing. Ulrich Schneider
Sensor: TeraRanger One
SVN Ordner: Systeme/

Das Ziel der Lehrveranstaltung Signalverarbeitende Systeme ist es einen zugeteilten Sensor mit der Hilfe MATLAB/Simulink auszulesen und dessen Signalverarbeitungskette zu beschreiben, zu untersuchen und zu verstehen mit dieser semesterbegleitenden Prüfung ist es eine Signalverarbeitungskette beschreiben, untersuchen und verstehen zu können. Die Untersuchung des Sensors wird mit der Entwicklungsumgebung MATLAB/Simulink durchgeführt.
einen zugeteilten Sensor mit der Hilfe der Sowftware MATLAB/Simulink auszulesen und dessen Signalverarbeitungskette zu beschreiben, zu untersuchen und zu verstehen.[1]
Einleitung
Der Tera Ranger One ist ein Infrarotsensor Abstandssensor, ist ein von Terabee entwickelter Sensor um berührungslos Abstände zwischen sich und der Umgebung zu messen. Der Tera Ranger One Infrarotsensor wurde erstmalig Anfang 2014 von der Firma Terabee vorgestellt. Den Tera Ranger One gibt es in zwei verschiedenen Ausführungen. Einmal als Frame oder als Box. Beide Sensoren sind von der Hardware und Software gleich identisch, nur die Außenhaut ist unterschiedlich.
Der Sensor besitzt laut Herstellter folgende Technische Daten[2]:
- Arbeitsbereich von 200 bis 14 000 Millimetern (innerhalb des Hauses) und 5 000 Millimetern im Freien
- Auflösung von 5 Millimetern
- Messungenauigkeit von ±40mm
- Stromaufnahme 30 Milliampere
- Sichtfeld von 3°
- Betriebsspannung 12V DC empfohlen (10 bis 20V DC akzeptiert)
- Betriebsstrom 50mA Durchschnitt (110mA Peak bei 12V)
- Abmessungen 29 x 35 x 18 Millimeter (Höhe x Breite x Tiefe) [3]
- Gewicht 8g Spider und 10g Box Ausführung
- Ausführungsbeispiele
-
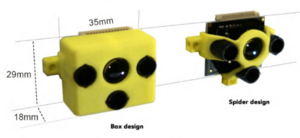 Abb.2: TeraRangerOne als Box und Spider Ausführung.
Abb.2: TeraRangerOne als Box und Spider Ausführung. -
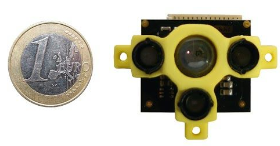 Abb.3: TeraRangerOne Groeßenvergleich.PNG
Abb.3: TeraRangerOne Groeßenvergleich.PNG


Signalverarbeitung

Messung
Messprinzip
Der Tera Ranger One benutzt das Time of Flight Prinzip zur Abstandsmessung. TeraRanger One-Abstandsmessungen basieren auf der Infrarot-Flugzeit: Der Sensor gibt ein Infrarotsignal ab und berechnet den Abstand, anhand wie lange das Signal bis zum Objekt unterwegs ist und von dort reflektiert wieder am sensor angelangt ist.

In der Abbildung 4 ist das Prinzip eines Time of Flight (Flugzeit) Messung dargestellt. Das Infrarotsignal wird von einem Sender gesendet und Prallt auf ein Objekt, von diesem Objekt gelangt das Signal zu dem Empfänger.
Die Entfernung des Objekt hängt linear von der Flugzeit des Signalsab und lässt sich berrechnen aus:
Die gemessene Flugzeit wird halbiert, da nur die einfache Entfernung vom Sensor zum Objekt gesucht ist.
Fehler beim Parsen (Syntaxfehler): {\displaystyle \Delta x =\frac{gemessene Flugzeit \cdot Geschwindigkeit im Medium}{\frac{2}} }
Fehler beim Parsen (Unbekannte Funktion „\Abstand“): {\displaystyle \Abstand =\frac{gemessene Flugzeit \cdot Geschwindigkeit im Medium }{\2} }
Versuchsaufbau
bloa bla lücke
Berechnungen
Der arithmetische Mittelwert ist ein Schätzwert für den wahren Wert der Messgröße. Er wird berechnet, indem die Summe der Einzelwerte durch die Zahl der Elemente dividiert wird:
Die Standardabweichung ist ein ein Maß für die Streuung, der anzeigt, inwieweit die Werte um den arithmetischen Mittelwert streuen. Je größer die Standardabweichung in Relation zum Mittelwert ist, desto größer ist die Streuung und desto schlechter spiegelt der Mittelwert die Daten wider. Er hat dieselbe Einheit wie der Mittelwert:
Die Messunsicherheit wird nach der Student t Verteilung bestimmt. Hierbei ist die Anzahl der Messungen und die Standardabweichung. Zusätzlich beschreibt den Vertrauensfaktor für die Verteilung, die aus einer speziellen Tabelle abgelesen werden kann. Bei industriellen Anwendungen und in der Messtechnik wird üblicherweise ein Vertrauensniveau von 95 % angenommen. In diesem Fall ist t=2,35 für ein Vertrauensniveau von 95 %.
Messergebnisse
Insgesamt wurden mehrere Messreihen mit der gemessenen Distanz ermittelt. Diese Messreihen wurden zeitlich nacheinander festgehalten und in nachfolgender Tabelle eingetragen. Anschließend wurde nach oben stehenden Formeln der Mittelwert, Standartabweichung und Messunsicherheit ausgerechnet.

Einzelnachweise
- ↑ Signalverarbeitende Systeme SoSe2018
- ↑ https://www.terabee.com/wp-content/uploads/2017/09/TeraRanger-One-Specification-Sheet1-1.pdf] Abgerufen am 05.07.2018
- ↑ "Tera Ranger One von Terabee" von [1]
→ zurück zum Hauptartikel: Signalverarbeitende Systeme