TeraRanger mit Matlab/Simulink
Autor: Patrick Klauke
Betreuer: Prof. Dr.-Ing. Ulrich Schneider
Sensor: TeraRanger One
SVN Ordner: Systeme/

Das Ziel der Lehrveranstaltung Signalverarbeitende Systeme ist es einen zugeteilten Sensor mit der Hilfe MATLAB/Simulink auszulesen und dessen Signalverarbeitungskette zu beschreiben, zu untersuchen und zu verstehen mit dieser semesterbegleitenden Prüfung ist es eine Signalverarbeitungskette beschreiben, untersuchen und verstehen zu können. Die Untersuchung des Sensors wird mit der Entwicklungsumgebung MATLAB/Simulink durchgeführt.
einen zugeteilten Sensor mit der Hilfe der Sowftware MATLAB/Simulink auszulesen und dessen Signalverarbeitungskette zu beschreiben, zu untersuchen und zu verstehen.[1]
Einleitung
Der Tera Ranger One ist ein Infrarotsensor Abstandssensor, ist ein von Terabee entwickelter Sensor um berührungslos Abstände zwischen sich und der Umgebung zu messen. Der Tera Ranger One Infrarotsensor wurde erstmalig Anfang 2014 von der Firma Terabee vorgestellt. Den Tera Ranger One gibt es in zwei verschiedenen Ausführungen. Einmal als Spider oder als Box. Beide Sensoren sind von der Hardware und Software gleich identisch, nur die Außenhaut ist unterschiedlich.
Der Sensor besitzt laut Herstellter folgende Technische Daten[2]:
- Arbeitsbereich von 200 bis 14 000 Millimetern (innerhalb des Hauses) und 5 000 Millimetern im Freien
- Auflösung von 5 Millimetern
- Messungenauigkeit von ±40mm
- Stromaufnahme 30 Milliampere
- Sichtfeld von 3°
- Betriebsspannung 12V DC empfohlen (10 bis 20V DC akzeptiert)
- Betriebsstrom 50mA Durchschnitt (110mA Peak bei 12V)
- Abmessungen 29 x 35 x 18 Millimeter (Höhe x Breite x Tiefe) [3]
- Gewicht 8g Spider und 10g Box Ausführung
- Ausführungsbeispiele
-
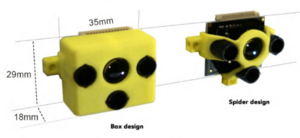 Abb.2: TeraRangerOne als Box und Spider Ausführung.
Abb.2: TeraRangerOne als Box und Spider Ausführung. -
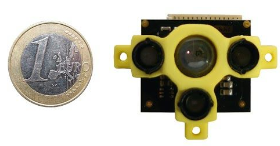 Abb.3: TeraRangerOne Groeßenvergleich.PNG
Abb.3: TeraRangerOne Groeßenvergleich.PNG


Signalverarbeitung
Sensor Anschlüsse

Der Tera Ranger One kann über einen 15-Pin-Anschluss der Hirose DF13-Serie verbunden werden. Die mit dem Tera Ranger One gelieferte Kabelgruppe wird mit sechs installierten Kabeln geliefert: Masse (GND, Pin 1 und 15), positive Versorgungsspannung (Vcc, Pin14), UART-Empfang (RXD, Pin 12) *, UART-Übertragung (TXD, Pin 13) * und Reset (Pin 7) Die Allgemeine Pinbelegung sieht wie folgt aus:
Pin----Funktion
15 ----GND
14 ----Vcc (10V, akzeptiert 1020V)
13 ----Serienausgang (TXD), 5 V Pegel
12 ----Serial in (RXD), 5 V Pegel
11 ----TWI ** SDA
10 ---TWI ** SCL
9 ----Benutzer E / A 1
8 ----Benutzer-E / A 2
7 ----Arduino-kompatibles Reset (tDTR)
6 ----Reset in (zum Reset auf GND ziehen)
5 ----MOSI (für SPI oder blinkend)
4 ----MISO (für SPI oder blinkend)
3 ----SCLK (für SPI oder blinkend)
2 ----+ 5V out (nur zur Versorgung von Programmiergeräten mit Spannung, max. 10mA!)
1 ----GND
UART
Die Standardschnittstelle des Tera Ranger One kummuniziert über UART an den Pins 12 und 13. Sie benötigt einen Eingangsspannung von 5V, der Ausgangsspannungspegel beträgt 5V. Es wird empfohlen eine Schnittstelle zu verwenden die Seriell-zu-USB unterstützt um den Sensor direkt am PC auslesen zu können (Beispielsweise den USB Adapter von Terabee). Über die UART-Schnittstelle ist der Sensor freilaufend, d.h. der Sensor liefert permanent Messungen. Der UART ist konfiguriert zum Senden und Empfangen von 115200 Bit / s, 8 Datenbits, kein Paritätsbit und ein Stoppbit. Es wird empfohlen den Tera Ranger One nicht mit einem echten RS232-Port zu verbinden.
USB-Adapter
Der USB-Adapter ermöglicht eine relative einfachee Plug & Play-Verbindung mit einem PC. Zum einen wird der Sensor über die USB Schnittstelle mit Strom versorgt. Unter Windows 10 musste keine Treiber installiert werden, da der Sensor automatisch als COM-Port erkannt wird. Für den Fall das ein Treiber benötigt wird, klick hier
AD-Umsetzer
Ein Analog-Digital-Umsetzer (ADU) ist ein elektronisches Bauteil welches analoge Messsignale durch eine Umwandlung wertdiskretisiert und dadurch in einem digitalen Datenstrom weiterverwendet werden kann. Auf der Internetseite von Terabee findet man keine Angaben welcher ADU im im Tera Ranger One verbaut ist. Auf Anfrage beim Technischen Support bekam ich die Antwort:"Der Tera Ranger One arbeitet voll digital." Diese Antwort glaube ich nicht.
Messung
Messprinzip
Der Tera Ranger One benutzt das Time of Flight Prinzip zur Abstandsmessung. TeraRanger One-Abstandsmessungen basieren auf der Infrarot-Flugzeit: Der Sensor sendet ein Infrarotsignal aus und berechnet den Abstand, anhand wie lange das Signal bis zum Objekt unterwegs ist und von dort reflektiert wieder am sensor angelangt ist. Unten stehende Abbildung erklärt die funktionsweise einer TOF Abstandsmessung. In der Abbildung als 1 dargestellt ist der Sender, der das Infrarotsignal (Nr.3) aussendet. Dieses Signal wird von zu messenden Gegenstand (Nr.5) reflektiert und wird über den Empfänger (Nr.2) aufgenommen. Aus der Zeit zwischen aussenden des Signals und dem Zeitpunkt wo das Signal im Empfänger registriert (Flugzeit) wird, wird die Entfernung nach untenstehender Formel berrechnet. [4]

In der Abbildung 4 ist das Prinzip eines Time of Flight (Flugzeit) Messung dargestellt. Das Infrarotsignal wird von einem Sender gesendet und Prallt auf ein Objekt, von diesem Objekt gelangt das Signal zu dem Empfänger.
Die Entfernung des Objekt hängt linear von der Flugzeit des Signalsab und lässt sich berrechnen aus:
Die gemessene Flugzeit wird halbiert, da nur die einfache Entfernung vom Sensor zum Objekt gesucht ist.
Versuchsaufbau

Die Messergebnisse der Messungen wurden statisch aufgezeichnet. Hierzu wurde der Sensor an eine Wand geklebt und ein Gliedermaßstab vor dem Sensor auf den Boden gelegt. Der Distanz-Nullpunkt des Sensorts wurde experimentell ermittelt indem der Gliedermaßstab einmal an den Anfang und einmal an das Ende des Sensors geschoben wurde. So konnte ermittelt werden das der Distanz-Nullpunkt des Tera Ranger One nicht an der Rückseite (Kontaktfläche zur Wand) liegt, sondern dort wo die Sensoren aufhören. Zu erkennen ist das im Versuchaufbau, da der Gliedermaßstab nicht bündig an der Wand anliegt. Nachdem der Distance-Nullpunkt ermittelt wurde, wurde ein Papkarton auf verschiedene ganzzählige Entfernungen aufgestellt.
Berechnungen
Um eine Aussage treffen zu können, wie "genau" oder "ungenau" ein Sensor misst, wird in diesem Kapitel die dafür notwendigen Formeln erläutert
Der arithmetische Mittelwert ist ein Schätzwert für den wahren Wert der Messgröße. Er wird berechnet, indem die Summe der Einzelwerte durch die Zahl der Elemente dividiert wird:
Die Standardabweichung ist ein ein Maß für die Streuung, der anzeigt, inwieweit die Werte um den arithmetischen Mittelwert streuen. Je größer die Standardabweichung in Relation zum Mittelwert ist, desto größer ist die Streuung und desto schlechter spiegelt der Mittelwert die Daten wider. Er hat dieselbe Einheit wie der Mittelwert:
Die Messunsicherheit wird nach der Student t Verteilung bestimmt. Hierbei ist die Anzahl der Messungen und die Standardabweichung. Zusätzlich beschreibt den Vertrauensfaktor für die Verteilung, die aus einer speziellen Tabelle abgelesen werden kann. Bei industriellen Anwendungen und in der Messtechnik wird üblicherweise ein Vertrauensniveau von 95 % angenommen. In diesem Fall ist t=2,35 für ein Vertrauensniveau von 95 %.
Messergebnisse
Insgesamt wurden mehrere Messreihen mit der gemessenen Distanz ermittelt. Diese Messreihen wurden zeitlich nacheinander festgehalten und in nachfolgender Tabelle eingetragen. Anschließend wurde nach oben stehenden Formeln der Mittelwert, Standartabweichung und Messunsicherheit ausgerechnet.

Auswertung
Aus den verschiedenen Messungen geht hervor, dass der Tera Ranger One keine Entfernungen kleiner als 200mm wahrnimmt, davor befindet sich der Sensor in der sogenannten Blindzone. Ab einer Entfernung von 200mm misst der Sensor mit recht stabiler Messunsicherheit. Der Tera Ranger One ist mit über 600Hz sehr dynamisch, Matlab selbst schafft es nicht alle Werte die der Sensor liefert auch einzulesen.
Fazit
Zusammenfasseend lässt sich sagen, dass der Entfernungsmesser von Terabee der sogenannte Tera Ranger One sehr gut über den USB-Adapter ausgelesen werden konnte. Die ausgelesenen Sensordaten entsprechen den Angaben vom Hersteller, in der Messunsicherheit lässt sich nicht bestimmen ob der Sensor für große oder nahe Entfernungen besser geeignet ist. Der Sensor kann bei Anwendungen mit mittlere Anforderung an die Genauigkeit verwendet werden, zu dem liefert der Sensor sehr viele Messwerte.
Youtube Video
Auf Youtube ist ein Video hochgestellt, welches zeigt, dass der Sensor Daten liefert. Youtube Video Tera Ranger One
Einzelnachweise
- ↑ Signalverarbeitende Systeme SoSe2018
- ↑ https://www.terabee.com/wp-content/uploads/2017/09/TeraRanger-One-Specification-Sheet1-1.pdf] Abgerufen am 05.07.2018
- ↑ "Tera Ranger One von Terabee" von [1]
- ↑ Messprinzip TOF
→ zurück zum Hauptartikel: Signalverarbeitende Systeme