ArduMower: Umfeldsensorik
Autoren: Phillip Blunck, Simon Kohfeld, Marius Schaffer
Betreuer: Prof. Schneider, Prof. Göbel
Hauptartikel: Projekt: Ardumower
Aufgabe
Mit Hilfe der Ultraschallsensoren (Abb. 1) sollen Hindernisse erkannt werden. Dabei müssen die Sensoren an die Hauptplatine angeschlossen und softwareseitig in MATLAB für das Hauptprogramm bereitgestellt werden.
Einleitung
Dieser Artikel stellt alle Arbeitsmeilensteine dar, die während des Semesters von der Gruppe erarbeitet wurden oder noch zu erledigen sind.
Ultraschall
Technische Daten des Moduls

| Messbereich | Messintervall | Messungen pro Sekunde | Versorgunsspannung | Pinbelegung | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2cm - 300cm | 0,3cm | maximal 50 | VCC +5V +-10%, GND 0V |
|
Funktionsweise des Moduls

Durch eine fallende Flanke am Triggereingang für mindestens 10µs wir der Messzyklus gestartet. Anschließend wird nach ca. 250µs ein 40kHz Burst-Signal für 200µs gesendet und der Ausgang (Echo) wechselt auf ein H-Pegel. Daraufhin wartet das Modul auf dem Empfang des Echos. Falls es detektiert wird, fällt der Ausgang auf einen L-Pegel. 20ms nach der Triggerung kann eine neue Messung druchgeführt werden. Wird jedoch kein Echo detektiert bleibt der Ausgang für 200ms auf dem H-Pegel und eine erfolglose Messung ist eingetreten. Danach reagiert das Modul auf die nächste fallende Flanke am Triggereinang und die Messung beginnt neu.
Verbauen der Ultraschallsensoren

In der Frontplatte des Ardumowers sind sechs Bohrungen enthalten, welche für die Montage der drei Ultraschallsensoren vorgesehen sind. Diese liegen zentral, links und rechts, damit ein möglichst großer Bereich erfasst werden kann.
Die Ultraschall Sensoren werden auf der Hauptplatine an den vorgesehenen Pins angeschlossen. Dabei haben diese eine feste Pin-Belegung am Arduino Mega:
- Sensor Mitte: PIN22 = Echo, PIN24 = Trigger
- Sensor Links: PIN34 = Trigger, PIN36 = Echo
- Sensor Rechts: PIN30 = Trigger, PIN32 = Echo
Außerdem ist darauf zu achten wie die Sensoren an der Hauptplatine verkabelt werden. Damit keine Fehler auftauchen sind die Pins nummeriert und haben dieselbe Reihenfolge:
- 1 = VCC +5V
- 2 = GND
- 3 = Trigger
- 4 = Echo.
-
 Abb.4: Pinlayout Arduino Mega
Abb.4: Pinlayout Arduino Mega -
 Abb.5: Pinlayout auf der Hauptplatine
Abb.5: Pinlayout auf der Hauptplatine -
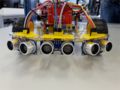 Abb.6: HC-SR04 am Mini
Abb.6: HC-SR04 am Mini -
 Abb.7: HC-SR04 am Ardumower
Abb.7: HC-SR04 am Ardumower -
 Abb.8: Pins auf der Hauptplatine
Abb.8: Pins auf der Hauptplatine





Basistest mit MATLAB und Arduino
Mit Hilfe von MATLAB und der Arduino IDE wurden Basistests durchgeführt, um die Funktion des Sensors zu testen und zu beobachten. Dabei wird eine Library für MATLAB verwenden, welche auch für Arduino eingesetzt werden kann. Jedoch kann diese Bibliothek nur für MATLAB Skripts/Arduino verwendet werden und eine eigene umsetzung in Simulink stellt deshalb ein Problem dar. Eine Lösung für Simulink wäre, den Arduino "C-Code" als S-Fuction umzuwandeln, um damit einen Simulink-Block zu generieren. Dabei könnten alle kompatiblen Bibliotheken für den HC-SR04 eingebunden werden oder man setzt folgenden Funktion als S-Function um.
#define TRIGGER 3
#define ECHO 2
int getEntfernung()
{
long d=0;
long t=0;
digitalWrite(TRIGGER, LOW);
delayMicroseconds(3);
noInterrupts();
digitalWrite(TRIGGER, HIGH); //Trigger Impuls für 10 us
delayMicroseconds(10);
digitalWrite(TRIGGER, LOW);
t = pulseIn(ECHO, HIGH); // Echo-Zeit messen
interrupts();
t = (t/2); // Zeit halbieren da doppelte Strecke zurückgelegt wird
d = t / 29.1; // Zeit in cm umrechnen
return(d);
}
Dieser Quelltext ist eine Umsetzung der Abläufe für eine Distanzmessung, welche nur mit der eigenen Arduino Bibliothek generiert werden kann, sodass man unabhängig von fertigen Libraries ist.
Auf gegenseitige Störung prüfen

- Bei Distanzen unter 1m kann der Winkel zum Objekt 45° Betragen
- Bei einer Distanz von 3m muss das Objekt genau positioniert sein und im Sendekegel von 15° liegen.
- Sensoren werden nacheinander ausgelesen, sodass keine Überschneidungen vorliegen
Messfehler feststellen
Bei Verwendung des Ultraschallmoduls könnenfolgende Messfehler auftreten:
- Auflösung: Die Auflösung beträgt ca. 3mm und erklärt sich durch die interne Abtastrate des Moduls
- Objekte: Die Geometrie eines zu messenden Objektes beeinflusst maßgeblich die Qualität der Messung
- Temperatur: Da die Schallgeschwindigkeit in der Luft temperaturabhängig ist ergeben sich andere Messergebnisse bei unterschiedlichen Temperaturen. Bei einer Temperaturdifferenz von 20°C ergibt sich ein Messfehler von 3,4%.
Eine Lösung für die auftretenden Messfehler wäre eine Temperaturkompensation in die Messung zu integrieren. Da die Schallgeschwindigkeit im Temperaturbereich näherungsweise mit folgender Formel berechnet werden kann:
könnte man mit Hilfe eines Temperatursensors im Ardumower den tatsächlichen Temperaturwert in die Berechnung der Distanz integrieren und die getätigten Messungen werden somit mit der richtigen Schallgeschwindigkeit durchgeführt.