Robotik und Automatisierung: Unterschied zwischen den Versionen
| Zeile 38: | Zeile 38: | ||
= Projekte = | = Projekte = | ||
* Bachelorarbeit Theine 2021: [[Aufbau_der_Sicherheitstechnik_und_Inbetriebnahme_ABB_Industrieroboter | Aufbau der Sicherheitstechnik und Inbetriebnahme der ABB-Industrieroboter]] | |||
* Projektarbeit Gosedopp 2016: "Ansteuerung eines Knickarmroboters zur Bewältigung von CNC-Aufgaben", u. a. mit CNC-Schreiben mit einem UR3-Roboter, Ansteuerung über RoboDK und Matlab. | * Projektarbeit Gosedopp 2016: "Ansteuerung eines Knickarmroboters zur Bewältigung von CNC-Aufgaben", u. a. mit CNC-Schreiben mit einem UR3-Roboter, Ansteuerung über RoboDK und Matlab. | ||
* Bachelorarbeit Gosedopp 2017: Ansteuerung als CNC-Maschine, z. B. zum [[Roboterfräsen_-_Vom_CAD-Modell_zum_fertigen_Bauteil_mit_dem_Industrieroboter | "Roboterfräsen"]]. Hier wird mit einem UR10-Roboter unter Verwendung von RoboDK der Roboter mit g-Code angesteuert. Der Verlauf ist auf der verlinkten Seite genau erläutert. | * Bachelorarbeit Gosedopp 2017: Ansteuerung als CNC-Maschine, z. B. zum [[Roboterfräsen_-_Vom_CAD-Modell_zum_fertigen_Bauteil_mit_dem_Industrieroboter | "Roboterfräsen"]]. Hier wird mit einem UR10-Roboter unter Verwendung von RoboDK der Roboter mit g-Code angesteuert. Der Verlauf ist auf der verlinkten Seite genau erläutert. | ||
Version vom 7. Dezember 2021, 15:41 Uhr
Diese Seite beleuchtet die Projekte und Vorhaben im Bereich und gleichnamigen Labor "Robotik und Automatisierung".
Einführung
Im Labor und Technologiebereich "Robotik und Automatisierung" wird mit Industrierobotern gearbeitet. Die Themen sind z. B.:
- Steuerung von Robotern mit Hilfe menschlicher Gesten
- Kraftregelung
- Kollaborierende Roboter, d. h. Zusammenarbeit von Mensch und Roboter
- Klassische Montage- und Handhabungsaufgaben (z. B. "Pick-And-Place"), auch unterstützt durch Kamera+Bilderkennung
- CNC-Fräsen, 3D-Drucken
- Steuerung und Regelung der Roboter durch SteuerungsPC mit RoboDK/Matlab/u. a.
Der Abschnitt Projekte zeigt bereits erfolgte oder in Arbeit befindliche Projekte.
Ausstattung
Stand 08.11.2019: Das Labor und der Bereich "Robotik und Automatisierung" befindet sich noch im Aufbau. Im Endausbau sind die im Folgenden dargestellten Roboter alle montiert, verkabelt und per PC ansteuerbar.
- Kollaborierende Roboter UR3 und UR10 von Universal Robots
- Roboterstation ABB IRB1400 M98
- Industrieroboter ABB IRB2400
- Delta-Picker-Roboter von Omron/Adept Quattro s650 und s650H
-
 ABB IRB2400
ABB IRB2400 -
 ABB IRB1400
ABB IRB1400 -
 Universal Robots UR3
Universal Robots UR3 -
 Universal Robots UR10
Universal Robots UR10 -
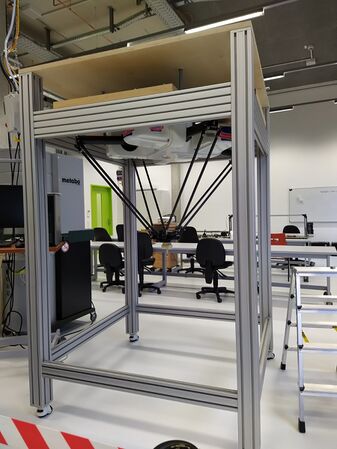 Delta-Roboter
Delta-Roboter
Projekte
- Bachelorarbeit Theine 2021: Aufbau der Sicherheitstechnik und Inbetriebnahme der ABB-Industrieroboter
- Projektarbeit Gosedopp 2016: "Ansteuerung eines Knickarmroboters zur Bewältigung von CNC-Aufgaben", u. a. mit CNC-Schreiben mit einem UR3-Roboter, Ansteuerung über RoboDK und Matlab.
- Bachelorarbeit Gosedopp 2017: Ansteuerung als CNC-Maschine, z. B. zum "Roboterfräsen". Hier wird mit einem UR10-Roboter unter Verwendung von RoboDK der Roboter mit g-Code angesteuert. Der Verlauf ist auf der verlinkten Seite genau erläutert.
- Bachelorarbeit Penner 2017: "Gestengesteuerte Fernbedienung eines UR10-Roboters unter Nutzung einer 3D-Kamera und Bilderkennungsalgorithmen"
Intelligente und flexible Ansteuerung von Robotern
RoboDK
In der Software RoboDK ist es möglich, Roboter-Konfigurationen wie im Bild dargestellt zu erstellen und damit dann beliebige CNC-Aufgaben zu planen und auszuführen.

Eine tolle Anwendung dieser Technik zeigt das Projekt Roboterfräsen.
Matlab
Die Software Matlab wurde im Projekt "Gestengesteuerte Fernbedienung eines UR10-Roboters" verwendet, um per Kinect-Kamera erkannte Positionen menschlicher Arme auf einen Roboter zu übertragen.
Sehr empfehlenswert für Matlab ist die "Robotics Toolbox" von Peter Corke, mit der es möglich ist, Roboter in Matlab zu modellieren und alle Bewegungen zu simulieren. Besonders interessant ist die dort verfügbare inverse Berechnung der Kinematik, d. h. von Soll-Werkzeugkopf-Koordinaten werden alle Gelenkwinkel des konfigurierten Roboters berechnet.
Dieser Artikel zeigt, wie über Matlab mit Hilfe der Robotics Toolbox ein UR-Roboter angesteuert werden kann.
Robot Operating System ROS
Mit dem Robot Operating System können alle Formen von Robotern angesteuert werden. Die Spanne reicht vom autonom fahrenden Fahrzeug bis hin zum Industrieroboter.
- Inbetriebnahme eines UR-10 Roboters mit ROS
- Objekterkennung mit ROS und einer Kinect v2 Kamera
- Inbetriebnahme der Schunk WSG-50 Greifer
Quellen
- ↑ Eigenes Foto