Xtion Pro Live: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 73: | Zeile 73: | ||
*[http://www.openni.ru/files/nite/index.html OpenNI Mirror] | *[http://www.openni.ru/files/nite/index.html OpenNI Mirror] | ||
*[http://sourceforge.net/projects/kinect-mex/ Kinect for Matlab] | *[http://sourceforge.net/projects/kinect-mex/ Kinect for Matlab] | ||
*[http://www.idsia.ch/~giusti/perceivingpeople/ People Detection and Tracking] | |||
Version vom 31. Juli 2014, 13:19 Uhr
Xtion Pro Live Spec
Verwendung der Xtion Pro Live unter Matlab
Vorraussetzung:
- Matlab R2013b 64 Bit
- Kinect Matlab by Dirk-Jan Kroon
- Visual Studio Professional 2012
- OpenNI 2.2.0
- NITE 2.2.0
- Microsoft KinectSDK v1.7 oder v1.8
1. Treiber installieren
2. Xtion anschließen
Der USB Treiber müsste automatisch gefunden werden
3. MEX-Compiler einstellen
>> mex -setup
Welcome to mex -setup. This utility will help you set up
a default compiler. For a list of supported compilers, see
http://www.mathworks.com/support/compilers/R2013b/win32.html
Please choose your compiler for building MEX-files:
Would you like mex to locate installed compilers [y]/n? y
Select a compiler:
[1] Lcc-win32 C 2.4.1 in C:\PROGRA~1\MATLAB\R2013b\sys\lcc
[2] Microsoft Visual C++ 2012 in M:\Programme\Microsoft Visual Studio 11.0
[0] None
Compiler: 2
Please verify your choices:
Compiler: Microsoft Visual C++ 2012
Location: M:\Programme\Microsoft Visual Studio 11.0
Are these correct [y]/n? y
4. Arbeitsverzeichnis wechseln
>> cd 'd:\SVN\Studentische_Arbeiten\PS_Markus_Kortmann\SRC\Kinect_Matlab_Demo\OpenNI2\'
5. .mexw32/.mexw64 Dateien compilieren
>> compile_cpp_files
6. Beispiel starten
>> Example_fps
Ergebnis ist die Darstellung der RGB- (links) und der Tiefenkamera (rechts).
Die Bilder werden mit max. 30 fps geliefert.
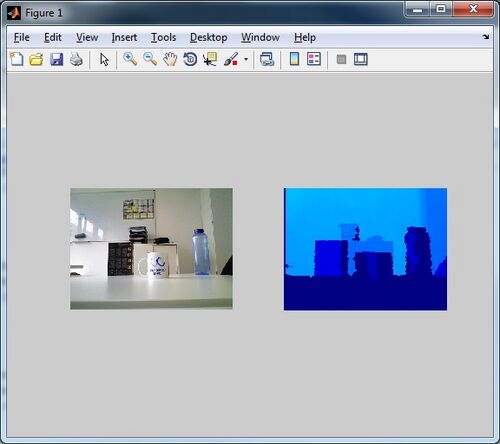
Darstellung der RGB- (links) und der Tiefenkamera (rechts)

http://193.175.248.171/wiki/index.php/
Hinweis: Der Target Installer für Kinect vom Matlab funktioniert nicht mit der Xtion Pro Live.
Using the Kinect® for Windows® from Image Acquisition Toolbox