Balance Bot: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 2: | Zeile 2: | ||
[[Kategorie:ProjekteET_MTR_BSE_WS2021]] | [[Kategorie:ProjekteET_MTR_BSE_WS2021]] | ||
<!-- --> | <!-- --> | ||
[[Datei:Rendering.JPG|500px|thumb|right|Rendering des Balance-Bots]] | |||
[[Datei:BalanceBot.jpg|500px|thumb|right|BalanceBot]] | |||
'''Autoren: [[Benutzer: Moritz-Ben-Joe Kühnrich|Moritz Kühnrich]] & [[Benutzer: Daniel Klassen|Daniel Klassen]]''' <br/> | '''Autoren: [[Benutzer: Moritz-Ben-Joe Kühnrich|Moritz Kühnrich]] & [[Benutzer: Daniel Klassen|Daniel Klassen]]''' <br/> | ||
'''Betreuer: [[Benutzer:Prof._Mirek_Göbel| Prof. Göbel]]''' <br/> | '''Betreuer: [[Benutzer:Prof._Mirek_Göbel| Prof. Göbel]]''' <br/> | ||
| Zeile 7: | Zeile 10: | ||
→ zurück zur Übersicht: [[:Kategorie:ProjekteET_MTR_BSE_WS2021|WS 21/22: Angewandte Elektrotechnik]] | → zurück zur Übersicht: [[:Kategorie:ProjekteET_MTR_BSE_WS2021|WS 21/22: Angewandte Elektrotechnik]] | ||
==Einleitung== | ==Einleitung== | ||
Das „BalanceBot“-Projekt wurde im Rahmen des GET-Fachpraktikums im 5.Fachsemester des Studienganges Mechatronik absolviert. Die Grundlagen und Kenntnisse aus verschiedenen Vorlesungen, besonders aus Mess- und Regelungstechnik und anderen Praktika, die bereits absolviert wurden, sollen dabei eingesetzt und vertieft werden. Außerdem stehen die Planung, das eigenständige Durchführen und die Dokumentation eines selbst ausgewählten Projektes im Vordergrund, sodass nach Abschluss des Projektes ein Entwicklungsprozess durchlaufen wurde. | Das „BalanceBot“-Projekt wurde im Rahmen des GET-Fachpraktikums im 5.Fachsemester des Studienganges Mechatronik absolviert. Die Grundlagen und Kenntnisse aus verschiedenen Vorlesungen, besonders aus Mess- und Regelungstechnik und anderen Praktika, die bereits absolviert wurden, sollen dabei eingesetzt und vertieft werden. Außerdem stehen die Planung, das eigenständige Durchführen und die Dokumentation eines selbst ausgewählten Projektes im Vordergrund, sodass nach Abschluss des Projektes ein Entwicklungsprozess durchlaufen wurde. | ||
| Zeile 13: | Zeile 30: | ||
Der BalanceBot ist ein kleiner zweirädriger Roboter, der das Ziel hat mithilfe der eingebauten elektronischen Bauteile, durch die Ansteuerung der zwei Motoren, die jeweils ein Rad antreiben, im Gleichgewicht zu bleiben und gerade auf der Stelle zu stehen. | Der BalanceBot ist ein kleiner zweirädriger Roboter, der das Ziel hat mithilfe der eingebauten elektronischen Bauteile, durch die Ansteuerung der zwei Motoren, die jeweils ein Rad antreiben, im Gleichgewicht zu bleiben und gerade auf der Stelle zu stehen. | ||
==Anforderungen== | ==Anforderungen== | ||
| Zeile 38: | Zeile 38: | ||
<br> | <br> | ||
<gallery widths="200" heights="200"> | <gallery widths="200" heights="200"> | ||
Bild:ErsteSkizze.jpg| | Bild:ErsteSkizze.jpg|Erste Skizze | ||
Bild:ErsterSystementwurf.jpg|Erster Systementwurf</gallery> | |||
==Komponentenspezifikation== | ==Komponentenspezifikation== | ||
[[Datei:Kostenkalkulation.jpg|thumb|right|Aufstellung der Kosten der verwendeten Bauteile]] | |||
===Mechanische Komponenten=== | |||
# Zwei selbstgestaltete Felgen (3D-Druck, ca. 110g PLA) | |||
# Selbstgestaltetes Grundgestell (3D-Druck, ca. 70g PLA) | |||
# M3 x 5mm Schrauben zur Befestigung der Motoren und der Leiterplatte an das Grundgestell | |||
# Kabelbinder zur Befestigung des Gewichtes/Akkus an das Grundgestell | |||
===Elektrische Komponenten=== | |||
# 2x Nema-17 Schrittmotoren (17HS4023) als Antrieb für den BalanceBot | |||
# 5cm x 7cm Leiterplatte als Träger für die elektrische Schaltung | |||
# 2x DRV-8825 Stepper Treiber als Ansteuerung für die beiden Motoren | |||
# MPU-6050 Gyro-Sensor zur Messung des Neigungswinkels und der Gierrate des Roboters | |||
# Arduino Nano Mikrocontroller | |||
# 100 µF Kondensator als Bauteilschutz | |||
==Umsetzung (HW/SW)== | |||
Generell wichtig bei der Umsetzung der Bauteile war, vorhandene Materialien zu verwenden und diese so zu verarbeiten, dass diese möglichst über das Projekt hinaus wiederverwendet werden können. Im folgenden wird auf die Umsetzung eingegangen. | |||
===Hardware=== | |||
Da zwei 3D-Drucker zur Verfügung stehen, wurden die mechanischen Bauteile mit diesen gefertigt. Durch das Verfahren ist ein großer Gestaltungsfreiraum gegeben, der bei der Konstruktion in SolidWorks voll ausgenutzt wurde. Das Design der Felgen erfolgte selbständig in Anlehnung an das ikonische Design der "MAE Crown Jewel"-Felge. Bei der Konstruktion des Grundgestells und der Felgen mussten die Maße des zuvor gewählten Motors berücksichtigt werden, um passende Anschraubpunkte am Grundgestell und Wellenaufnahmen an den Felgen zu realisieren. Bei der Konstruktion des Grundgestells wurde zusätzlich an der Unterseite eine Aufnahme für die Leiterplatte, auf der sich die elektrischen Bauteile befinden realisiert. Um fehlerhafte Drucke, aufgrund von nicht berücksichtigten Maßen zu vermeiden, wurden die einzelnen Bauteile in SolidWorks zu einer Baugruppe zusammengefügt. Entsprechende Modelle z.B. für die Motoren wurden aus dem Internet bezogen, sodass sichergestellt werden konnte, dass die Bauteile passen werden. Die CAD-Modelle wurden anschließend in einer Slicer-Software für den Druck vorbereitet. | |||
Nach Eintreffen aller bestellten Komponenten und einer Druckzeit von insgesamt etwa 20 Stunden konnte mit dem mechanischen Aufbau begonnen werden. Dazu musste zuerst das angefallene Supportmaterial von den gedruckten Teilen entfernt werden. Die Motoren sind mit jeweils vier M3 x 5mm Schrauben am Grundgestell befestigt. Die Felgen wurden mit einer Schraubzwinge auf die Motorwelle gepresst, sodass keine Möglichkeit von Schlupf an der Welle besteht. | |||
Die Elektrischen Bauteile sind auf einer Leiterplatte angebracht. Um diese wiederverwenden zu können, sind diese nicht direkt auf der Platine verlötet, sondern stattdessen Steckkontakte. In diese sind die Bauteile eingesteckt, um sie wiederverwenden, oder bei Bauteilversagen leicht austauschen zu können. | |||
== | <gallery widths="600" heights="300" perrow="2"> | ||
Felgen.PNG|CAD-Modell Felge | |||
Basis.PNG|CAD-Modell Grundgestell | |||
</gallery> | |||
===Elektrische Bauteile=== | |||
==Komponententest== | ==Komponententest== | ||
Version vom 8. Januar 2022, 13:54 Uhr


Autoren: Moritz Kühnrich & Daniel Klassen
Betreuer: Prof. Göbel
→ zurück zur Übersicht: WS 21/22: Angewandte Elektrotechnik
Einleitung
Das „BalanceBot“-Projekt wurde im Rahmen des GET-Fachpraktikums im 5.Fachsemester des Studienganges Mechatronik absolviert. Die Grundlagen und Kenntnisse aus verschiedenen Vorlesungen, besonders aus Mess- und Regelungstechnik und anderen Praktika, die bereits absolviert wurden, sollen dabei eingesetzt und vertieft werden. Außerdem stehen die Planung, das eigenständige Durchführen und die Dokumentation eines selbst ausgewählten Projektes im Vordergrund, sodass nach Abschluss des Projektes ein Entwicklungsprozess durchlaufen wurde. Der BalanceBot vereint, passend zum Studiengang Mechatronik, Mechanik, Elektronik und Informatik in einem Projekt und wird im Folgenden erläutert.
Der BalanceBot ist ein kleiner zweirädriger Roboter, der das Ziel hat mithilfe der eingebauten elektronischen Bauteile, durch die Ansteuerung der zwei Motoren, die jeweils ein Rad antreiben, im Gleichgewicht zu bleiben und gerade auf der Stelle zu stehen.
Anforderungen
Nach dem Anschalten des BalanceBot, soll der Roboter auf der Stelle stehen bzw. balancieren ohne zu kippen, indem die Räder in die entsprechende Richtung angetrieben werden. Nach Einwirkung äußerer Kraft durch leichtes anstoßen des Roboters, soll dieser wieder in die Ausgangslage zurückkehren und weiter auf der Stelle das Gleichgewicht halten.
Funktionaler Systementwurf/Technischer Systementwurf
Nach der Ideenfindung wurde mit einer ersten Skizze begonnen, um grob abzuschätzen mit welchem Verfahren die mechanischen und elektronischen Bauteile gefertigt und angeordnet werden. Die elektronischen Bauteile sollen bei voller technischer Funktion im Design versteckt sein. Als Trägheit, die den Roboter aus dem Gleichgewicht bringen soll, sind entweder ein Akku, der gleichzeitig Energie für den Roboter bereitstellt, denkbar, oder (bei Netzbetrieb) eine andere Art von Gewicht.
-
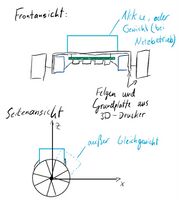 Erste Skizze
Erste Skizze -
 Erster Systementwurf
Erster Systementwurf


Komponentenspezifikation

Mechanische Komponenten
- Zwei selbstgestaltete Felgen (3D-Druck, ca. 110g PLA)
- Selbstgestaltetes Grundgestell (3D-Druck, ca. 70g PLA)
- M3 x 5mm Schrauben zur Befestigung der Motoren und der Leiterplatte an das Grundgestell
- Kabelbinder zur Befestigung des Gewichtes/Akkus an das Grundgestell
Elektrische Komponenten
- 2x Nema-17 Schrittmotoren (17HS4023) als Antrieb für den BalanceBot
- 5cm x 7cm Leiterplatte als Träger für die elektrische Schaltung
- 2x DRV-8825 Stepper Treiber als Ansteuerung für die beiden Motoren
- MPU-6050 Gyro-Sensor zur Messung des Neigungswinkels und der Gierrate des Roboters
- Arduino Nano Mikrocontroller
- 100 µF Kondensator als Bauteilschutz
Umsetzung (HW/SW)
Generell wichtig bei der Umsetzung der Bauteile war, vorhandene Materialien zu verwenden und diese so zu verarbeiten, dass diese möglichst über das Projekt hinaus wiederverwendet werden können. Im folgenden wird auf die Umsetzung eingegangen.
Hardware
Da zwei 3D-Drucker zur Verfügung stehen, wurden die mechanischen Bauteile mit diesen gefertigt. Durch das Verfahren ist ein großer Gestaltungsfreiraum gegeben, der bei der Konstruktion in SolidWorks voll ausgenutzt wurde. Das Design der Felgen erfolgte selbständig in Anlehnung an das ikonische Design der "MAE Crown Jewel"-Felge. Bei der Konstruktion des Grundgestells und der Felgen mussten die Maße des zuvor gewählten Motors berücksichtigt werden, um passende Anschraubpunkte am Grundgestell und Wellenaufnahmen an den Felgen zu realisieren. Bei der Konstruktion des Grundgestells wurde zusätzlich an der Unterseite eine Aufnahme für die Leiterplatte, auf der sich die elektrischen Bauteile befinden realisiert. Um fehlerhafte Drucke, aufgrund von nicht berücksichtigten Maßen zu vermeiden, wurden die einzelnen Bauteile in SolidWorks zu einer Baugruppe zusammengefügt. Entsprechende Modelle z.B. für die Motoren wurden aus dem Internet bezogen, sodass sichergestellt werden konnte, dass die Bauteile passen werden. Die CAD-Modelle wurden anschließend in einer Slicer-Software für den Druck vorbereitet. Nach Eintreffen aller bestellten Komponenten und einer Druckzeit von insgesamt etwa 20 Stunden konnte mit dem mechanischen Aufbau begonnen werden. Dazu musste zuerst das angefallene Supportmaterial von den gedruckten Teilen entfernt werden. Die Motoren sind mit jeweils vier M3 x 5mm Schrauben am Grundgestell befestigt. Die Felgen wurden mit einer Schraubzwinge auf die Motorwelle gepresst, sodass keine Möglichkeit von Schlupf an der Welle besteht. Die Elektrischen Bauteile sind auf einer Leiterplatte angebracht. Um diese wiederverwenden zu können, sind diese nicht direkt auf der Platine verlötet, sondern stattdessen Steckkontakte. In diese sind die Bauteile eingesteckt, um sie wiederverwenden, oder bei Bauteilversagen leicht austauschen zu können.
-
 CAD-Modell Felge
CAD-Modell Felge -
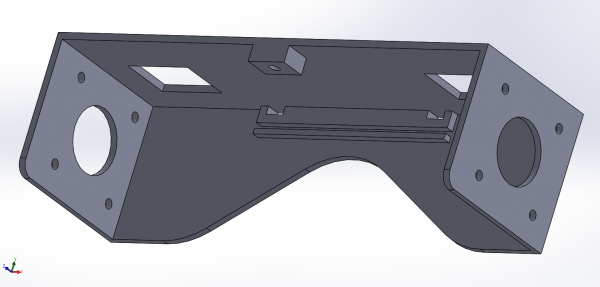 CAD-Modell Grundgestell
CAD-Modell Grundgestell

