SDE WS25: AP 1.2 Schätzung der Roboterpose: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 40: | Zeile 40: | ||
= Softwareentwurf = | = Softwareentwurf = | ||
<gallery widths="400px" heights="600px" > | <gallery widths="400px" heights="600px" > | ||
Datei: | Datei:pose_PAP.png|Abb. 1: pose.m | ||
</gallery> | </gallery> | ||
Version vom 11. November 2025, 14:08 Uhr

Autor: Benutzer:Jan Steffens
Einleitung/Funktion
Um die Positionserfassung des Alphabots durchzuführen, muss auf die TopCon Station und das zugehörige Prisma zurückgegriffen werden. Diese erfasst das Prisma und überträgt die Position per Bluetoooth an MATLAB.
Vorbereitung
- Matlab R2024b auf PC starten
- Script testpose.m starten
- Script pose.m muss sich im selber Ordner befinden
Anforderungen
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis |
|---|---|---|---|
| 1 | Punkte der Alphabotposition werden übergeben | PW (XPos; YPos) | Punkte werden nacheinander übergeben |
| 2 | korrekter Winkel zur X-Achse wird berechnet | dx, dy | passender Winkel zur Position des Alphabots |
| 3 | Winkel wird zurückgegeben | -180° bis 180° |
Softwareentwurf
-
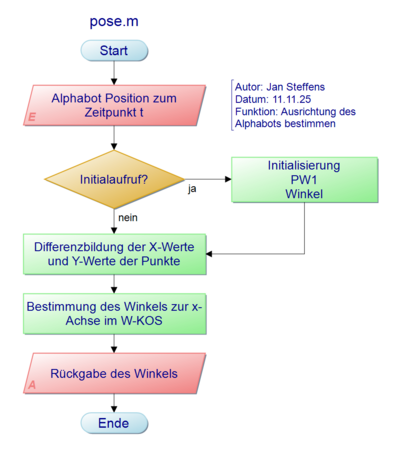 Abb. 1: pose.m
Abb. 1: pose.m

Umsetzung
SVN-Links:
Modultest
Für den Modultest werden die Winkel für die fortlaufenden Positionen bestimmt und gesichtet. Als Test wird der Punkt, an dem der Winkel zur X-Achse 90° beträgt, bestimmt und auf der Karte eingezeichnet.
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | Punkte der Alphabotposition werden übergeben | PW (XPos; YPos) | Punkte werden nacheinander übergeben | Punkte werden eingelesen | Jan Steffens | 11.11.2025 |
| 2 | korrekter Winkel zur X-Achse wird berechnet | dx, dy | passender Winkel zur Position des Alphabots | 90° werden erwartet | Jan Steffens | 11.11.2025 |
| 3 | Winkel wird zurückgegeben | -180° bis 180° | 90° wird zurückgegeben | Jan Steffens | 11.11.2025 |
-
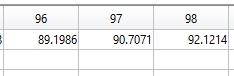 Abb. 3: Punkt, an dem der Winkel zur X-Achse 90° beträgt
Abb. 3: Punkt, an dem der Winkel zur X-Achse 90° beträgt -
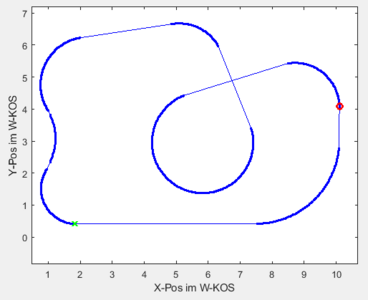 Abb. 4: Startpunkt der Mittelliniendaten und 90°-Punkt auf der Strecke
Abb. 4: Startpunkt der Mittelliniendaten und 90°-Punkt auf der Strecke -
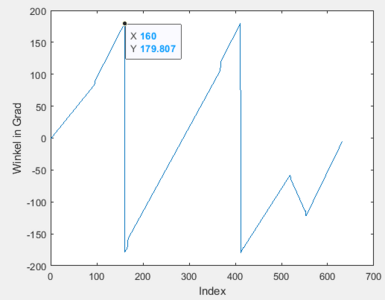 Abb. 5: Winkelverlauf zur x-Achse der Alphabot Ausrichtung
Abb. 5: Winkelverlauf zur x-Achse der Alphabot Ausrichtung



→ zurück zum Hauptartikel: Geregelte Autonome Fahrt