SDE WS25: BluetoothRegelung.ino: Unterschied zwischen den Versionen
| Zeile 45: | Zeile 45: | ||
|- | |- | ||
|<syntaxhighlight lang="arduino" style="background-color: #EFF1C1; font-size:small"> | |<syntaxhighlight lang="arduino" style="background-color: #EFF1C1; font-size:small"> | ||
/* Sensorbibliothek hinzufügen */ | |||
#include "AlphaBot.h" // Arduino Bibliothek für die Motoren einbinden | |||
int | |||
AlphaBot Alphabot = AlphaBot(); // Instanz des AlphaBot wird erzeugt | |||
unsigned long LetzterZeitstempel_u32; // Hilfsgröße: Zeitstempel des letzten Zyklus in ms | |||
if( | float LetzterError_s16 = 0; // Hilfsgröße: e aus letztem Zyklus | ||
static const int MAX_POWER_s16 = 80; // Maximalleistung des Antriebs | |||
static const float Kp = 0.07; // Proportionalitätsfaktor | |||
static const float Kd = 1.8; // Differentieller Faktor | |||
void setup() | |||
{ | |||
Serial.begin(9600); | |||
LetzterZeitstempel_u32=millis(); | |||
} | |||
void loop() | |||
{ | |||
int8_t e; | |||
if(Serial.available()) // Regelabweichung empfangen wenn Daten vorhanden sind | |||
{ | { | ||
e=Serial.read(); | |||
Serial.println(e); // Regelabweichung in cm empfangen | |||
int regelabweichung = e * 100; // für Regelung auflösung ändern | |||
regelung(regelabweichung); | |||
} | } | ||
} | |||
void regelung(int regelabweichung) | |||
{ | |||
Serial.print(" | static unsigned long Zeit_u32; // Aktueller Zeitstempel | ||
float P_s32; // P-Anteil des PD-Reglers | |||
float D_s32; // D-Anteil des PD-Reglers | |||
float Stellgroesse_s32; // Stellgroesse zur Berechnung der Kurvenfahrt | |||
/* Regleranteile P berechnen */ | |||
P_s32 = regelabweichung; // P-Anteil | |||
/* Regleranteile D berechnen */ | |||
Zeit_u32 = millis(); // Aktuelle Zeitstempel in ms | |||
float dt_s32=(float)((Zeit_u32-LetzterZeitstempel_u32)); // Zykluszeit dt in ms, ca. 20 ms | |||
D_s32 = (float)(regelabweichung - LetzterError_s16)/dt_s32; // D-Anteil de/dt | |||
LetzterZeitstempel_u32=Zeit_u32; // Aktuelle Werte speichern | |||
LetzterError_s16 = regelabweichung; | |||
/* Ergebnis des Reglers */ | |||
Stellgroesse_s32 = Kp* P_s32 + Kd * D_s32; // Stellgroesse berechnen | |||
/* Alphabot regeln */ | |||
float MotorPowerLinks = -MAX_POWER_s16 + Stellgroesse_s32/2; // Motorleistung anpassen | |||
float MotorPowerRechts = -MAX_POWER_s16 - Stellgroesse_s32/2; | |||
Alphabot.MotorRun(MotorPowerLinks, MotorPowerRechts); | |||
Serial.print("Nach ansteuerung: "); | |||
Serial.println(regelabweichung); | |||
} | |||
</syntaxhighlight> | </syntaxhighlight> | ||
|- | |- | ||
Version vom 10. November 2025, 14:48 Uhr

| Modul: | BluetoothRegelung.ino
|
| Revision: | 10877 |
| Autor: | Lukas Berkemeier |
| Datum: | 06.11.2025 |
| System: | Arduino IDE |
| SVN-URL: | https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/c-files/BluetoothRegelung/BluetoothRegelung.ino
|
Einleitung/Funktion
Im Modul BluetoothRegelung.ino wird die Regelabweichung genutzt um die Stellgröße zu berechnen und die Alphabotmotoren zu regeln. Im Modul wird außerdem bereits die Bluetoothübertragung aus Arbeitspaket 1.4 Übertragung der Ist-Ablage via BT MATLAB→Arduino genutzt, mit der die Regelabweichung empfangen wird. Die Regelabweichung ist dabei die Distanz zur Solllinie in mm.
Funktionaler Systementwurf
Anforderungen
Die Anforderungen werden aus Arbeitspaket 1.5 Geregelte Fahrt anhand der Ist-Ablage entnommen.
Technischer Systementwurf
Der Systementwurf entspricht dem Modulentwurf aus Abbildung 2.
-
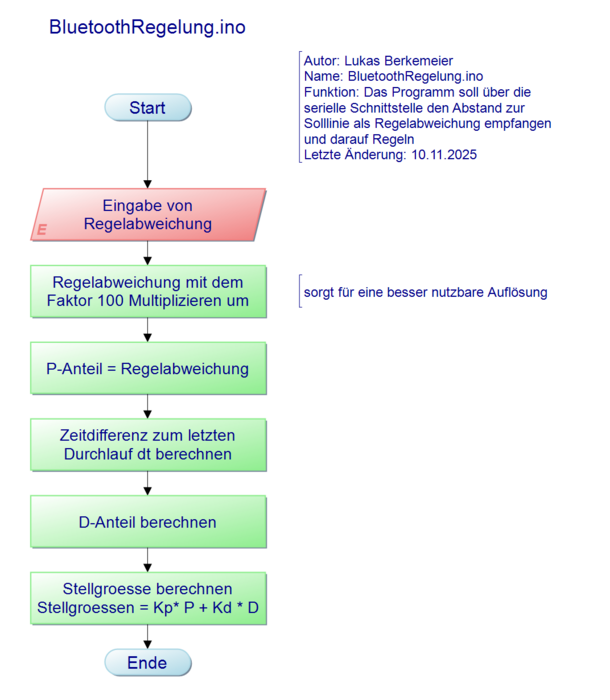 Abb. 2: BluetoothRegelung.ino
Abb. 2: BluetoothRegelung.ino

Komponentenspezifikation
Die Distanz zur Mittellinie wird durch die Messwerte der Tracking-Sensoren ermittelt.
- Empfang der Regelabweichung über die Serielle Schnittstelle bzw. HC-05 Bluetoothmodul
- Regelung anhand der Regelabweichung
- Der P-Anteil entspricht der Regelabweichung
- Zeitdifferenz dt zum letzten Durchlauf berechnen
- D-Anteil berechnen:
- Stellgröße berechnen:
- Alphabotmotoren mit Stellgröße ansteuern
Programmierung
messeMittellinie.ino
|
/* Sensorbibliothek hinzufügen */
#include "AlphaBot.h" // Arduino Bibliothek für die Motoren einbinden
AlphaBot Alphabot = AlphaBot(); // Instanz des AlphaBot wird erzeugt
unsigned long LetzterZeitstempel_u32; // Hilfsgröße: Zeitstempel des letzten Zyklus in ms
float LetzterError_s16 = 0; // Hilfsgröße: e aus letztem Zyklus
static const int MAX_POWER_s16 = 80; // Maximalleistung des Antriebs
static const float Kp = 0.07; // Proportionalitätsfaktor
static const float Kd = 1.8; // Differentieller Faktor
void setup()
{
Serial.begin(9600);
LetzterZeitstempel_u32=millis();
}
void loop()
{
int8_t e;
if(Serial.available()) // Regelabweichung empfangen wenn Daten vorhanden sind
{
e=Serial.read();
Serial.println(e); // Regelabweichung in cm empfangen
int regelabweichung = e * 100; // für Regelung auflösung ändern
regelung(regelabweichung);
}
}
void regelung(int regelabweichung)
{
static unsigned long Zeit_u32; // Aktueller Zeitstempel
float P_s32; // P-Anteil des PD-Reglers
float D_s32; // D-Anteil des PD-Reglers
float Stellgroesse_s32; // Stellgroesse zur Berechnung der Kurvenfahrt
/* Regleranteile P berechnen */
P_s32 = regelabweichung; // P-Anteil
/* Regleranteile D berechnen */
Zeit_u32 = millis(); // Aktuelle Zeitstempel in ms
float dt_s32=(float)((Zeit_u32-LetzterZeitstempel_u32)); // Zykluszeit dt in ms, ca. 20 ms
D_s32 = (float)(regelabweichung - LetzterError_s16)/dt_s32; // D-Anteil de/dt
LetzterZeitstempel_u32=Zeit_u32; // Aktuelle Werte speichern
LetzterError_s16 = regelabweichung;
/* Ergebnis des Reglers */
Stellgroesse_s32 = Kp* P_s32 + Kd * D_s32; // Stellgroesse berechnen
/* Alphabot regeln */
float MotorPowerLinks = -MAX_POWER_s16 + Stellgroesse_s32/2; // Motorleistung anpassen
float MotorPowerRechts = -MAX_POWER_s16 - Stellgroesse_s32/2;
Alphabot.MotorRun(MotorPowerLinks, MotorPowerRechts);
Serial.print("Nach ansteuerung: ");
Serial.println(regelabweichung);
}
|
Modultest
Da es sich bei dieser Entwicklung um die eines einzelnen Moduls handelt, schließt der Modultest mit dem Testbericht die Entwicklung ab (vgl. Tabelle 2). Zum Testen des Moduls wird das Modul BluetoothRegelung.ino und trackeSendeReglerTest.m genutzt. Das Arduino-Programm beinhaltet den Empfang der Daten und die Stellgrößenberechnung. Mit dem Skript trackeSendeReglerTest.m wird die Distanz des Prismas zur y-Achse der Topcon Station in Millimeter berechnet und mit Bluetooth an den Alphabot gesendet.
Systematisches Vorgehen beim Testen:
- Bluetooth Dongle in PC einstecken
- Arduino des Alphabot mit USB-Kabel an einen PC anschließen
- Arduino IDE starten
BluetoothRegelung.inoöffnen- COM-Port des Alphabot auswählen
- Programm auf den Arduino des Alphabot hochladen (Das HC-05 Modul muss dazu abgezogen werden)
- Seriellen Monitor starten
- Topcon Station aufbauen
- TopCon gemäß Artikel in Betrieb nehmen.
trackeSendeReglerTest.möffnen und starten
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | Lukas Berkemeier | |||||
| 2 | Lukas Berkemeier | |||||
| 3 | Lukas Berkemeier | |||||
| 4 | Lukas Berkemeier |
Fehlerbehebung

Nach der ersten Modulplanung sollte die Spannweite wie in Abbildung 5 von beiden äußeren Sensoren zentral über der Mitte der Mittellinie, mit 65 mm Spannweite genutzt werden. Mit der Funktion map() wurden den Positionswerten 350-3650 die Entfernungen 33 bis -33 mm zugewiesen. Bei dieser Spannweite kam es im Bereich der äußeren Sensoren immer zu Messungenauigkeiten.
Zur Fehlerbehebung wurde die Spannweite auf 48 mm (+-24 mm) verringert und den Positionswerten 800-3200 die Entfernungen 24 bis -24 mm zugewiesen.
Im Modultest wurden die Änderungen als passend bewiesen.
Eine weitere Fehlerursache ist die Kalibrierung bzw. die Beleuchtung der Sensoren. Je nach Beleuchtung können verschiedene Werte gemessen werden. Ein möglicher Schritt zur Fehlerbehebung wäre das Anbringen einer Beleuchtung für die Sensoren um die Beleuchtung möglichst konstant zu halten.
Zusammenfassung
Das Modul messeMittellinie.ino wurde systematisch entworfen, getestet und dokumentiert. Sämtliche Anforderungen aus dem Arbeitspaket SDE WS25: AP 1.6 Messung der Mittellinie wurden erfüllt. Die Funktion kann eingesetzt werden, um die Distanz der Mitte der Mittellinie zum zentralen Sensor des Alphabot zu berechnen. In Zukunft kann das Modul verwendet werden um die Positionen der realen Mittellinienstreifen der Fahrbahn zu bestimmen.