AF: Gierrate (SenGier, SabGier): Unterschied zwischen den Versionen
| Zeile 15: | Zeile 15: | ||
https://wiki.hshl.de/wiki/index.php/Messkette_Gierratensensor | https://wiki.hshl.de/wiki/index.php/Messkette_Gierratensensor | ||
== Aufbau == | == Aufbau Sensor == | ||
Ein Schaubild für den internen Aufbau ist zu finden unter: | Ein Schaubild für den internen Aufbau ist zu finden unter: | ||
https://wiki.hshl.de/wiki/index.php/Messkette_Gierratensensor | https://wiki.hshl.de/wiki/index.php/Messkette_Gierratensensor | ||
Version vom 24. April 2023, 16:08 Uhr
Autoren: Benjamin Dilly & Kevin Mudczinski

Hauptseite
SDE Praktikum
SDE-Team 2023/24
Lernzielkontrolle 1
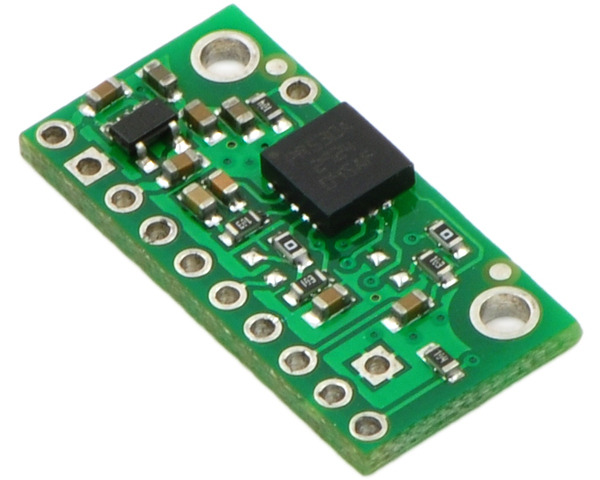
Primärsensor
Sensor LPR510AL. Zu finden unter: https://a.pololu-files.com/product/1271
Messkette
Ein Schaubild für die Messkette ist zu finden unter: https://wiki.hshl.de/wiki/index.php/Messkette_Gierratensensor
Aufbau Sensor
Ein Schaubild für den internen Aufbau ist zu finden unter: https://wiki.hshl.de/wiki/index.php/Messkette_Gierratensensor
Systementwurf
Beschreiben Sie den technischen Systementwurf.
Einbauposition
Der Gierratensensor ist im hellblauen Rechteck auf der Hauptplatine verbaut.
-
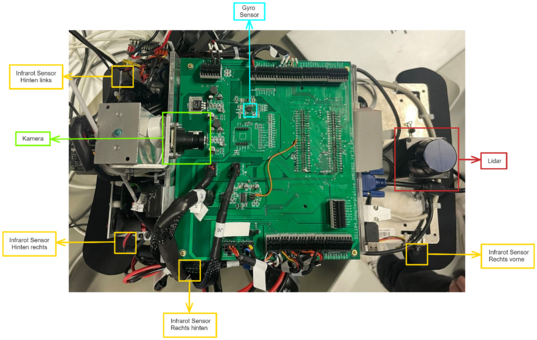 Abbildung 10: Plott der PT1 gefilterten integrierten Offsetkompression.
Abbildung 10: Plott der PT1 gefilterten integrierten Offsetkompression.

Sensoranschlussplan
| NR | Pin | Typ | Funktion |
|---|---|---|---|
| 1 | VIN | INPUT | Spannungsversorgung 3,3V oder 5V |
| 2 | GND | INPUT | Spannungsversorgung |
| 3 | 3.3V | OUTPUT | |
| 4 | X | OUTPUT | Rotation um X-Achse (pitch axis = Nickachse (nach vorne/hinten)) |
| 5 | 4X | OUTPUT | Rotation um X-Achse verstärkt (pitch axis = Nickachse (nach vorne/hinten)) |
| 6 | Vref | OUTPUT | |
| 7 | 4Z | OUTPUT | Rotation um Z-Achse verstärkt (yaw axis = Gierrate (nach links/rechts)) |
| 8 | Z | OUTPUT | Rotation um Z-Achse (yaw axis = Gierrate (nach links/rechts)) |
| 9 | PD | ||
| 10 | ST |
Analoge Singalverarbeitung
Schnittstelle zur DS1104
- Pinbelegung/Anschlussplan
- ADU
| Sensor Pin | Belegung | DS1104 ADC | Sensorposition | Signal |
|---|---|---|---|---|
| 1 | Ausgang | SenGier_pisp_roh_K_f64 |
Sensorblock - SEN - Sensoren - online

PFAD: CCF_online > SEN - Sensoren - online
Darstellung relevanter Block für den Eingang des Gierraten-Sensors

PFAD: CCF_online > SEN - Sensoren - online > SenGier - Gierrate
Umwandlung des Gierraten Eingangs in Rohwert
SenGier - Gierrate
Eingang / Ausgang
Block: SenGier - Gierrate (Abbildung 2, 3)
Eingang: ADC_eing
Ausgang: SenGier_psip_roh_K_f64
Funktion
- Einlesen des Drehwinkels, als normalisierte Gleitkommazahl in Gradmaß von
BLOCK DS1104MUX_ADC - Umwandlung in Rohwert
BLOCK SenGier - Gierrate- Umwandlung ADC-Eingang in Degree
BLOCK ADC_2_deg(Abbildung 3)
Multiplikation mit 1000 (Bsp. 0.1203 * 1000 = 120.3°) - Umwandlung Grad- in Bogenmaß
BLOCK D2R(Abbildung 3)
- Umwandlung ADC-Eingang in Degree
Sensorblock - SAB - Signalaufbereitung

PFAD: CCF_online > SAB - Signalaufbereitung
Darstellung der Signalaufbereitungsblocks

PFAD: CCF_online > SAB - Signalaufbereitung - SabGier - Gierrate
Darstellung der Signalaufbereitung der Gierrate
SabGier - Gierrate
Eingang / Ausgang
Block: SabGier - Gierrate
Eingang: SenGier_psip_roh_K_64, SenTast_AEP_bit, SenGier_psi_reset_bit, SenTast_BSF_Grundk_bit, SenTast_BSF_GrundkHindernis_bit
Ausgang: SenGier_psi_filt_K_f64, SenGier_psip_filt_K_f64, SenGier_psi_unfilt_K_f64, SenGier_psip_unfilt_K_f64, SabGier_Reset_bit
Funktion Offsetberechnung & Offsetkompensation
Berechnet einmalig den Offset des Sensors. Hierfür werden beim Start des Systems oder nach einer Rücksetzung einmalig 1000 Werte gemessen und gemittelt, um den Offset zu berechnen.
Dies dient der Elimination von Rauschen oder fehlerhaftem Einbau des Sensors (bspw. schiefes Einbauen), um einen Nullwert zu ermitteln.
Die Offsetkompensation zieht dann den Offset von dem ungefilterten Rohwert ab (vgl. Abb. 5).
- Eingang
SenGier_psip_roh_K_64 - Ausgang
SabGier_Offset
Funktion PT_1_Eing_f
Glätten den offsetkompensierten Messwert.
Funktion Integrator
Addiert die aktuelle Winkelgeschwindigkeit auf (Merkt den letzten Wert), bzw. den aktuell zurückgelegten Winkel.
Signalanalyse
Beschreibung
In der folgenden Plots wurde der Gierraten Sensor gemessen. Hierbei wurde das Fahrzeug auf dem Tisch hochgebockt auf einem Karton immer um 90° pro 3s bewegt und dazwischen für einen kurzen Moment gestoppt.
Messwertanalyse
Block 1: Rohwertberechnung
Subplot 1
- X-Achse: Zeit
- Y-Achse: ADC
Subplot 2
- X-Achse: Zeit
- Y-Achse: SenGier_psip_roh_K_64
-
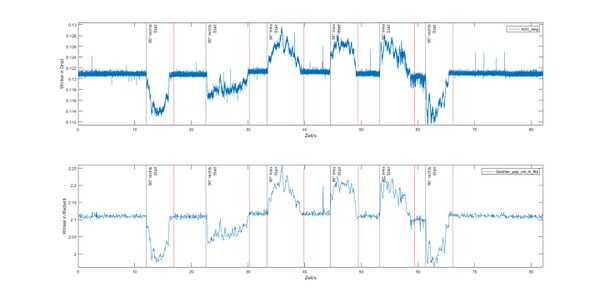 Abbildung 6: Plott des ADC-Eingangs zum SenGier_psip_roh_k_f64 Ausgang in SEN
Abbildung 6: Plott des ADC-Eingangs zum SenGier_psip_roh_k_f64 Ausgang in SEN

Block 2: Offsetkompession
Subplot 1
- X-Achse: Zeit
- Y-Achse: SenGier_psip_roh_K_64, Offset
Subplot 2
- X-Achse: Zeit
- Y-Achse: SenGier_psip_unfilt_K_f64, Offset
-
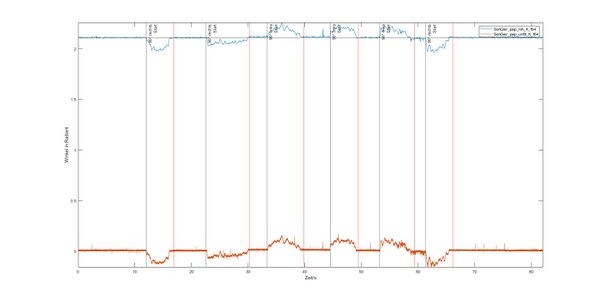 Abbildung 7: Plott der Offsetkompression
Abbildung 7: Plott der Offsetkompression

Block 3: Rohwert nach Offsetkompression & Integrierter Rohwert nach Offsetkompression
Subplot 1
- X-Achse: Zeit
- Y-Achse: SenGier_psip_unfilt_K_f64
Subplot 2
- X-Achse: Zeit
- Y-Achse: SenGier_psi_unfilt_K_f64
-
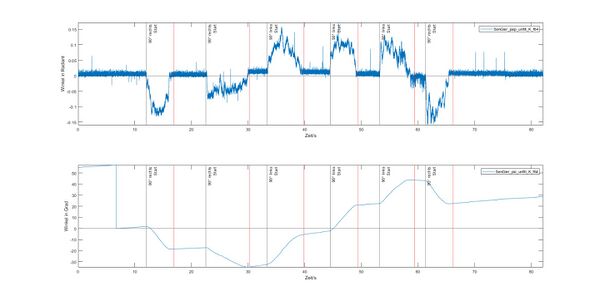 Abbildung 8: Plott der ungefilterten offsetkomprimierten Integration.
Abbildung 8: Plott der ungefilterten offsetkomprimierten Integration.

Block 4: Tiefpassfilterung nach Offsetkompression
Subplot 1
- X-Achse: Zeit
- Y-Achse: SenGier_psip_unfilt_K_f64
Subplot 2
- X-Achse: Zeit
- Y-Achse: SenGier_psip_filt_K_f64
-
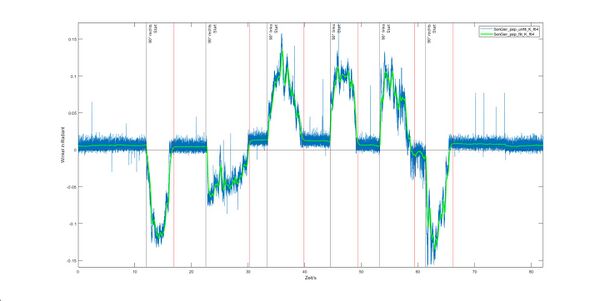 Abbildung 9: Plott der PT1 gefilterten Offsetkompression.
Abbildung 9: Plott der PT1 gefilterten Offsetkompression.

Block 5: Integrierte Tiefpassfilterung
Subplot 1
- X-Achse: Zeit
- Y-Achse: SenGier_psip_filt_K_f64
Subplot 2
- X-Achse: Zeit
- Y-Achse: SenGier_psi_filt_K_f64
Integrierte Tiefpassfilterkurve FALSCH
-
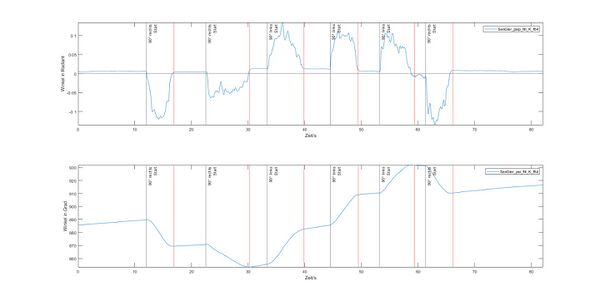 Abbildung 10: Plott der PT1 gefilterten integrierten Offsetkompression.
Abbildung 10: Plott der PT1 gefilterten integrierten Offsetkompression.

Liste offener Punkte (LOP)
| # | Problem | Analyse | Maßnahme | Freigabe | Wirksamkeit | Dokumentation |
|---|---|---|---|---|---|---|
| 1 | SenGier_psi_filt_K_f64 gibt falschen Wert aus |
Legende
- Problem: Was genau ist das Problem? Wo tritt das Problem auf? Wie zeigt sich das Problem? Wann tritt das Problem auf? Warum ist es ein Problem?
- Analyse: Was ist die Ursache des Problems?
- Maßnahme: Maßnahme zur Beseitigung der identifizierten Ursache
- Freigabe: Abstimmung der Maßnahme mit Prof. Schneider
- Wirksamkeit: Beschreibung Nachweis Wirksamkeit (Dummy-Prüfung, Versuche, Kurzzeitfähigkeit, Kennzahlen, Audit, etc.)
- Dokumentation: Doku der Lösung im HSHL-Wiki
Zusammenfassung
Alle Sensoren sind funktionsfähig.
Dokumentation in SVN
- Link zu Messdaten
- Link zur MATLAB®-Auswertung
→ zurück zum Hauptartikel: Praktikum SDE | SDE-Team 2023/24 | Lernzielkontrolle 1
{kind=link}