Escape Game: Polarlock: Unterschied zwischen den Versionen
| (48 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 10: | Zeile 10: | ||
|- | |- | ||
|} | |} | ||
[[Datei:Status Prüfe.jpg|mini|rechts|500px|Abb.01. Polarlock]] | |||
| Zeile 29: | Zeile 30: | ||
'''So sehen die beigestellten Rätsel aus:''' | '''So sehen die beigestellten Rätsel aus:''' | ||
1) | 1) In der LED-Technik steht eine bestimmte Farbe für kurze Wellenlängen und hohe Signalwirkung bei Statusanzeigen. Welche Farbe ist das? | ||
Welche | |||
2) Ein | 2) Ein digitales System arbeitet mit binären Signalen. Wie viele verschiedene Zustände kann ein einzelnes Bit annehmen? | ||
3) | 3) In der Elektronik werden Skalen, Referenzflächen oder Anzeigen häufig in einer Farbe ausgeführt, die nahezu das gesamte sichtbare Licht reflektiert und dadurch besonders gut erkennbar ist. Welche Farbe ist das? | ||
4) Ein digitaler | 4) Ein digitaler Sensor erkennt „Signal vorhanden“ oder „kein Signal“. Kombiniert man diese Information mit zwei möglichen Magnetpolen, wie viele Zustandskombinationen ergeben sich insgesamt? | ||
5) | 5) In der Elektrotechnik wird für Masse, Abschirmung oder inaktive Bereiche häufig eine sehr dunkle Farbe verwendet. Welche Farbe ist das? | ||
6) Ein | 6) Ein digitaler Codeträger besitzt mehrere klar unterscheidbare Zustände. Entspricht die Anzahl dieser Zustände der Seitenzahl eines klassischen Würfels, wie viele Zustände sind das? | ||
Die sechs Rätselaufgaben des Polarlocks sind so gestaltet, dass die Besucher der Projektmesse mithilfe grundlegender Kenntnisse aus der Elektrotechnik und dem Magnetismus die richtige Kombination der drei Würfel ermitteln können. Die erste, dritte und fünfte Frage liefern Informationen, aus denen sich jeweils die korrekte Farbe des Würfels in den drei Slots ableiten lässt. Die zweite, vierte und sechste Frage beziehen sich hingegen auf die richtige Orientierung bzw. nummerierte Seite des jeweiligen Würfels und verknüpfen damit logisches Denken mit einfachen physikalischen und elektronischen Grundlagen. | Die sechs Rätselaufgaben des Polarlocks sind so gestaltet, dass die Besucher der Projektmesse mithilfe grundlegender Kenntnisse aus der Elektrotechnik, Digitaltechnik und dem Magnetismus die richtige Kombination der drei Würfel ermitteln können. Die erste, dritte und fünfte Frage liefern Informationen, aus denen sich jeweils die korrekte Farbe des Würfels in den drei Slots ableiten lässt. Die zweite, vierte und sechste Frage beziehen sich hingegen auf die richtige Orientierung bzw. nummerierte Seite des jeweiligen Würfels und verknüpfen damit logisches Denken mit einfachen physikalischen und elektronischen Grundlagen. | ||
| Zeile 59: | Zeile 56: | ||
! ID !! Inhalt !! Priorität !! Ersteller !! Datum !! Geprüft von !! Datum | ! ID !! Inhalt !! Priorität !! Ersteller !! Datum !! Geprüft von !! Datum | ||
|- | |- | ||
|1 || Das Spiel muss in maximal 5 Minuten lösbar sein.|| Hoch || Singh/Uppal || 03.10.2025 || | |1 || Das Spiel muss in maximal 5 Minuten lösbar sein.|| Hoch || Singh/Uppal || 03.10.2025 ||Singh||15.12.2025 | ||
|- | |- | ||
|2 || Eine Auswahl passender elektronischer Komponenten muss erfolgen.|| Hoch || Singh/Uppal || 03.10.2025 || | |2 || Eine Auswahl passender elektronischer Komponenten muss erfolgen.|| Hoch || Singh/Uppal || 03.10.2025 || Singh||15.12.2025 | ||
|- | |- | ||
|3 || Die Konstruktion der benötigten CAD-Modelle für mechanische Bauteile muss erfolgen. || Hoch || Singh/Uppal || 03.10.2025 || | |3 || Die Konstruktion der benötigten CAD-Modelle für mechanische Bauteile muss erfolgen. || Hoch || Singh/Uppal || 03.10.2025 ||Singh||15.12.2025 | ||
|- | |- | ||
|4 || Die Verdrahtung | |4 || Die Verdrahtung aller elektronischen Komponenten mit dem Mikrocontroller muss vollständig umgesetzt und funktionsfähig sein.|| Hoch || Singh/Uppal || 03.10.2025 ||Singh||15.12.2025 | ||
|- | |- | ||
|5 || Das Spiel startet beim Drücken von Taste 1 (Start-Button). || Hoch || Singh/Uppal || 03.10.2025 || | |5 || Das Spiel startet beim Drücken von Taste 1 (Start-Button). || Hoch || Singh/Uppal || 03.10.2025 ||Singh||15.12.2025 | ||
|- | |- | ||
|6 || | |6 ||Den Spielern wird per Ausdruck ein Rätseltext bereitgestellt, der die Lösungsvoraussetzungen für das Magnetwürfel-Puzzle vollständig beschreibt.|| Hoch || Singh/Uppal || 03.10.2025 ||Singh||15.12.2025 | ||
|- | |- | ||
|7 || Die korrekte Lösung des Rätsels führt dazu, dass jeder Würfel mit der richtigen nummerierten Seite in den jeweiligen korrekten Slots gelegt wird. || Hoch || Singh/Uppal || 03.10.2025 || | |7 || Die korrekte Lösung des Rätsels führt dazu, dass jeder Würfel mit der richtigen nummerierten Seite in den jeweiligen korrekten Slots gelegt wird. || Hoch || Singh/Uppal || 03.10.2025 ||Singh||15.12.2025 | ||
|- | |- | ||
|8 ||Die Rätsel haben einen mittleren Schwierigkeitsgrad. || Hoch || Singh/Uppal || 03.10.2025 || | |8 ||Die Rätsel haben einen mittleren Schwierigkeitsgrad. || Hoch || Singh/Uppal || 03.10.2025 ||Singh||15.12.2025 | ||
|- | |- | ||
|9 || Je Slot (A/B/C) wird Magnetpräsenz und korrekte Polorientierung (N/S) über ein Hallsenor detektiert. || Hoch || Singh/Uppal || 03.10.2025 || | |9 || Je Slot (A/B/C) wird Magnetpräsenz und korrekte Polorientierung (N/S) über ein Hallsenor detektiert. || Hoch || Singh/Uppal || 03.10.2025 ||Uppal || 15.12.2025 | ||
|- | |- | ||
|10 || Wenn alle Würfel korrekt platziert und ausgerichtet sind, leuchtet die grüne LED und der dreistellige Code wird auf dem LCD-Display 16×2 ausgegeben.|| Hoch || Singh/Uppal || 03.10.2025 || | |10 || Wenn alle Würfel korrekt platziert und ausgerichtet sind, leuchtet die grüne LED und der dreistellige Code wird auf dem LCD-Display 16×2 ausgegeben.|| Hoch || Singh/Uppal || 03.10.2025 ||Uppal || 15.12.2025 | ||
|- | |- | ||
|11 || Ein Reset-Taster (Taste 2) erlaubt Neustart nach Spielende oder Fehlversuch.|| Hoch || Singh/Uppal || 03.10.2025 || | |11 || Ein Reset-Taster (Taste 2) erlaubt Neustart nach Spielende oder Fehlversuch.|| Hoch || Singh/Uppal || 03.10.2025 ||Uppal || 15.12.2025 | ||
|- | |- | ||
|12 || Wenn mindestens ein Würfel falsch liegt, zeigt das LCD „Fehlversuch“; die rote LED leuchtet dauerhaft, bis ein neuer Versuch mit dem Reset-Taster gestartet wird.|| Hoch || Singh/Uppal || 03.10.2025 || | |12 || Wenn mindestens ein Würfel falsch liegt, zeigt das LCD „Fehlversuch“; die rote LED leuchtet dauerhaft, bis ein neuer Versuch mit dem Reset-Taster gestartet wird.|| Hoch || Singh/Uppal || 03.10.2025 ||Uppal || 15.12.2025 | ||
|- | |- | ||
|13 || Die erforderlichen CAD-Modelle, Datenblätter und Programmdaten müssen dokumentiert werden.|| Hoch || Singh/Uppal || 03.10.2025 || | |13 || Die erforderlichen CAD-Modelle, Datenblätter und Programmdaten müssen dokumentiert werden.|| Hoch || Singh/Uppal || 03.10.2025 || Uppal||15.12.2025 | ||
|- | |- | ||
|14 || Ein Wiki-Artikel muss nach Anleitung fertiggestellt werden.|| Hoch || Singh/Uppal || 03.10.2025 || | |14 || Ein Wiki-Artikel muss nach Anleitung fertiggestellt werden.|| Hoch || Singh/Uppal || 03.10.2025 || Uppal || 15.12.2025 | ||
|} | |} | ||
| Zeile 99: | Zeile 96: | ||
[[Datei:Abb-02- Funktionaler Systementwurf.jpg|400px|thumb|left|Abb. | [[Datei:Abb-02- Funktionaler Systementwurf.jpg|400px|thumb|left|Abb.02- Funktionaler Systementwurf ]] | ||
[[Datei:Technischer_Systementwurf_des_Polarlocks.jpg|400px|thumb|left|Abb. | [[Datei:Technischer_Systementwurf_des_Polarlocks.jpg|400px|thumb|left|Abb.03- Technische Schaltung]] | ||
[[Datei:Schaltplan in Multism.jpg|400px|thumb|left|Abb. | [[Datei:Schaltplan in Multism.jpg|400px|thumb|left|Abb.04- Schaltplan des Polarlocks]] | ||
<br> | <br> | ||
<br> | <br> | ||
| Zeile 145: | Zeile 142: | ||
<br> | <br> | ||
[[Datei:Technische_Schaltung.jpg|400px|thumb|right|Abb. | [[Datei:Technische_Schaltung.jpg|400px|thumb|right|Abb.05- Technischer Systementwurf]] | ||
'''Technischer Systementwurf''' | '''Technischer Systementwurf''' | ||
| Zeile 263: | Zeile 260: | ||
Das Gehäuse der Hardware wurde für die Fertigung im 3D-Druckverfahren ausgelegt. Hierzu wurden mit der Software SolidWorks mehrere CAD-Modelle der einzelnen Bauelemente erstellt. Diese sind im Folgenden dargestellt: | Das Gehäuse der Hardware wurde für die Fertigung im 3D-Druckverfahren ausgelegt. Hierzu wurden mit der Software SolidWorks mehrere CAD-Modelle der einzelnen Bauelemente erstellt. Diese sind im Folgenden dargestellt: | ||
Die Abbildung 4 zeigt die Gesamte Baugruppe des Polarlocks. In der Frontfläche befindet sich eine kreisförmige Aussparung, die für Reset Taster vorgesehen ist. Daneben ist eine rechteckige Öffnung integriert, welche für die Montage des LCD-Displays dient. Unterhalb des Displays sind die Platzierungen für die Würfel angeordnet. Diese Bereiche sind so gestaltet, dass die Würfel eindeutig positioniert werden können. In Abbildung 5 ist eine einzelne Würfel. Im Inneren des Würfel befindet sich eine Ausschnitt für das Magnet zur erkennung der Würfelposition. Abbildung 6 zeigt die Unterseite der Baugruppe, welche als Trägerstruktur für die gesamte Konstruktion dient. Sie bildet die mechanische Basis und ermöglicht die Befestigung weitere Komponenten wie z.B. Arduino, Elektronik und Sensoren. | |||
[[Datei:Gesamte Baugruppe neu.png|350px|thumb|left|Abb.06:CAD_Zeichnung Gesamte Baugruppe]] | |||
[[Datei: | [[Datei:Würfel Neu.png|350px|thumb|left|Abb.07:CAD_Zeichnung Würfel]] | ||
[[Datei:CAD Zeichnung Bottom Platte.jpg|350px|thumb|left|Abb.08:CAD_Zeichnung Bottom Platte]] | |||
<br> | |||
[[Datei:CAD Zeichnung Bottom Platte.jpg| | <br> | ||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | <br> | ||
<br> | <br> | ||
| Zeile 317: | Zeile 328: | ||
'''Programmablaufplan''' | '''Programmablaufplan''' | ||
In Abbildung | In Abbildung 9 ist der Programmablaufplan des Polarlocks dargestellt. | ||
[[Datei:Programmablaufplan Polarlock.png||400px|thumb|left|Abb. | [[Datei:Programmablaufplan Polarlock.png||400px|thumb|left|Abb.09- Programmablaufplan]] | ||
| Zeile 348: | Zeile 359: | ||
Die Abbildung 9 legt das Simulink-Modell des Polarlocks dar. Das Modell ist farblich markiert, um die Signalflüsse erkenntlich zu machen. Gelb markierte Blöcke stellen die Eingänge dar: Dazu gehören die drei Hall-Sensoren an den digitalen Pins 3, 4 und 6, die jeweils ein digitales Signal zur Magneterkennung liefern, sowie die Reset-Taste an Pin 9. Das Reset-Signal wird zusätzlich durch einen Entprell-Block geführt, um ein stabiles, störungsfreies Eingangssignal zu erzeugen. Der graue Block in der Mitte bildet die zentrale Spiellogik, in der alle Eingangssignale zusammengeführt und ausgewertet werden. Grün markierte Blöcke kennzeichnen die Ausgänge: Eine grüne LED an Pin 11 signalisiert einen erfolgreichen Spielabschluss und die rote LED an Pin 12 zeigt einen Fehlversuch. Über den LCD-Ausgang werden Statusmeldungen und Textinformationen an ein über die I²C-Schnittstelle angebundenes Display übertragen und dort angezeigt. | Die Abbildung 9 legt das Simulink-Modell des Polarlocks dar. Das Modell ist farblich markiert, um die Signalflüsse erkenntlich zu machen. Gelb markierte Blöcke stellen die Eingänge dar: Dazu gehören die drei Hall-Sensoren an den digitalen Pins 3, 4 und 6, die jeweils ein digitales Signal zur Magneterkennung liefern, sowie die Reset-Taste an Pin 9. Das Reset-Signal wird zusätzlich durch einen Entprell-Block geführt, um ein stabiles, störungsfreies Eingangssignal zu erzeugen. Der graue Block in der Mitte bildet die zentrale Spiellogik, in der alle Eingangssignale zusammengeführt und ausgewertet werden. Grün markierte Blöcke kennzeichnen die Ausgänge: Eine grüne LED an Pin 11 signalisiert einen erfolgreichen Spielabschluss und die rote LED an Pin 12 zeigt einen Fehlversuch. Über den LCD-Ausgang werden Statusmeldungen und Textinformationen an ein über die I²C-Schnittstelle angebundenes Display übertragen und dort angezeigt. | ||
[[Datei:Simulink-Modell des Polarlocks.png||1000px|thumb|left|Abb. | [[Datei:Simulink-Modell des Polarlocks.png||1000px|thumb|left|Abb.10- Simulink-Modell des Polarlocks]] | ||
<br> | <br> | ||
<br> | <br> | ||
| Zeile 378: | Zeile 389: | ||
Der Block „Polarlock_Logik“ ist ein MATLAB-Simulink-Subsystem. Dieser stellt die zentrale Spiellogik des Systems dar und besitzt klar definierte Ein- und Ausgänge. Im Anschluss an die Abbildung des Subsystems „Spiel_Logik“ folgt der zugehörige MATLAB-Code, der die interne Spiellogik implementiert. | Der Block „Polarlock_Logik“ ist ein MATLAB-Simulink-Subsystem. Dieser stellt die zentrale Spiellogik des Systems dar und besitzt klar definierte Ein- und Ausgänge. Im Anschluss an die Abbildung des Subsystems „Spiel_Logik“ folgt der zugehörige MATLAB-Code, der die interne Spiellogik implementiert. | ||
[[Datei:Spiellogik des Polarlocks.png|800px|thumb|left|Abb. | [[Datei:Spiellogik des Polarlocks.png|800px|thumb|left|Abb.11- Subsystem "Spiel_logik"]] | ||
<br> | <br> | ||
<br> | <br> | ||
| Zeile 401: | Zeile 412: | ||
| <div style="width:600px; height:600px; overflow:scroll; border: hidden"> | | <div style="width:600px; height:600px; overflow:scroll; border: hidden"> | ||
<syntaxhighlight lang="cpp" style="border: none; background-color: #EFF1C1; font-size:larger"> | <syntaxhighlight lang="cpp" style="border: none; background-color: #EFF1C1; font-size:larger"> | ||
%**************************************************************** | %**************************************************************** | ||
% Funktion : Polar_Lock_Neu.slx * | |||
% Funktion : | |||
% * | % * | ||
% Datum : 28.11.2025 * | % Datum : 28.11.2025 * | ||
% * | % * | ||
% Betreuer : Marc Ebmeyer * | % Betreuer : Marc Ebmeyer * | ||
% * | % * | ||
% Funktion : Steuerung des Polarlocks * | % Funktion : Steuerung des Polarlocks * | ||
% * | % * | ||
% Implementation : Matlab R2024b * | % Implementation : Matlab R2024b * | ||
% * | % * | ||
% Author : Barinder Singh und Yash Uppal * | % Author : Barinder Singh und Yash Uppal * | ||
% * | % * | ||
% Hardware : Arduino Uno R3 * | % Hardware : Arduino Uno R3 * | ||
% * | % * | ||
% Letzte Änderung : 14.01.2026 * | |||
% Letzte Änderung : | % * | ||
%**************************************************************** | %**************************************************************** | ||
function [LED_gruen, LED_rot, lcdData] = SpielLogik(hallA, hallB, hallC, reset) | function [LED_gruen, LED_rot, lcdData] = SpielLogik(hallA, hallB, hallC, reset) | ||
% | % Persistent Variablen | ||
persistent state % Aktueller Stand des Spiels | |||
persistent prevA prevB prevC % Letzte stabile Hall-Sensorwerte | |||
persistent stableCount % Zähler für stabile Messungen | |||
persistent prevReset % Reset Zustand der letzten Iteration | |||
persistent waitForChange % Warten bis | |||
persistent lastWasSuccess | |||
if isempty(state) | if isempty(state) | ||
state = int32(0); | state = int32(0); % STATE_IDLE | ||
end | end | ||
if isempty(prevA) | if isempty(prevA) | ||
prevA = int32( | prevA = int32(hallA); | ||
prevB = int32( | prevB = int32(hallB); | ||
prevC = int32( | prevC = int32(hallC); | ||
end | end | ||
if isempty(stableCount) | if isempty(stableCount) | ||
| Zeile 455: | Zeile 455: | ||
if isempty(prevReset) | if isempty(prevReset) | ||
prevReset = int32(0); | prevReset = int32(0); | ||
end | |||
if isempty(waitForChange) | |||
waitForChange = int32(0); | |||
end | |||
if isempty(lastWasSuccess) | |||
lastWasSuccess = int32(0); | |||
end | end | ||
% | % Verschiedene Zustände | ||
STATE_IDLE | STATE_IDLE = int32(0); | ||
STATE_PRUEFE | STATE_PRUEFE = int32(1); | ||
STATE_ERFOLG | STATE_ERFOLG = int32(2); | ||
STATE_FEHL = int32(3); | |||
N_STABLE = int32(50); | N_STABLE = int32(50); % 50 Sensor Werte | ||
% | % LCD und LEDs Output | ||
LED_gruen = int32(0); | LED_gruen = int32(0); | ||
LED_rot = int32(0); | LED_rot = int32(0); | ||
lcdData = uint8(32 * ones(16,1)); | |||
lcdData = uint8(32 * ones(16,1)); | |||
% | % INPUT_PULLUP: gedrückt = 0 | ||
reset_i = int32(reset | reset_i = int32(reset == 0); | ||
resetFlanke = int32(reset_i == 1 && prevReset == 0); | resetFlanke = int32(reset_i == 1 && prevReset == 0); | ||
prevReset = reset_i; | prevReset = reset_i; | ||
| Zeile 482: | Zeile 484: | ||
state = STATE_IDLE; | state = STATE_IDLE; | ||
stableCount = int32(0); | stableCount = int32(0); | ||
prevA = int32( | |||
prevB = int32( | % Nach Erfolg muss Zustand an Hall sensor geändert werden | ||
prevC = int32( | if lastWasSuccess | ||
waitForChange = int32(1); | |||
else | |||
waitForChange = int32(0); | |||
end | |||
prevA = int32(hallA); | |||
prevB = int32(hallB); | |||
prevC = int32(hallC); | |||
end | end | ||
% Zustand | |||
switch state | switch state | ||
case STATE_IDLE | case STATE_IDLE | ||
if waitForChange | |||
% Nach Erfolg: Warten bis sich mindestens ein Sensor wert ändert | |||
if (hallA ~= prevA) || (hallB ~= prevB) || (hallC ~= prevC) | |||
waitForChange = int32(0); | |||
state = STATE_PRUEFE; | |||
stableCount = int32(1); | |||
prevA = int32(hallA); | |||
prevB = int32(hallB); | |||
prevC = int32(hallC); | |||
end | |||
else | |||
% Normaler Start nach Fehlversuch | |||
state = STATE_PRUEFE; | state = STATE_PRUEFE; | ||
stableCount = int32(1); | |||
prevA = int32(hallA); | prevA = int32(hallA); | ||
prevB = int32(hallB); | prevB = int32(hallB); | ||
prevC = int32(hallC); | prevC = int32(hallC); | ||
end | end | ||
case STATE_PRUEFE | case STATE_PRUEFE | ||
% Stabilität der gesamten Kombination prüfen | |||
if (hallA == prevA) && (hallB == prevB) && (hallC == prevC) | |||
stableCount = stableCount + 1; | |||
stableCount = | |||
else | else | ||
stableCount = int32(1); | |||
prevA = int32(hallA); | |||
prevB = int32(hallB); | |||
prevC = int32(hallC); | |||
end | end | ||
% Nur bei stabiler Kombination auswerten sonst Fehlversuch | |||
if stableCount >= N_STABLE | if stableCount >= N_STABLE | ||
if (hallA == 1) && (hallB == 0) && (hallC == 1) | |||
state = STATE_ERFOLG; | state = STATE_ERFOLG; | ||
else | else | ||
state = | state = STATE_FEHL; | ||
end | end | ||
end | end | ||
case STATE_ERFOLG | case STATE_ERFOLG | ||
LED_gruen = int32(1); | LED_gruen = int32(1); | ||
lastWasSuccess = int32(1); | |||
case STATE_FEHL | |||
LED_rot = int32(1); | |||
case | lastWasSuccess = int32(0); | ||
LED_rot | |||
end | end | ||
% | % Ausgabe LCD_Display | ||
textStr = | textStr = ' '; | ||
switch | switch state | ||
case STATE_IDLE | case STATE_IDLE | ||
textStr = ' Bereit | if waitForChange | ||
textStr = 'Magnet aendern '; | |||
else | |||
textStr = ' Bereit '; | |||
end | |||
case STATE_PRUEFE | case STATE_PRUEFE | ||
textStr = ' Pruefe... | textStr = ' Pruefe... '; | ||
case STATE_ERFOLG | case STATE_ERFOLG | ||
textStr = 'Erfolg! | textStr = 'Erfolg! Code941'; | ||
case | case STATE_FEHL | ||
textStr = 'Fehlversuch | textStr = 'Fehlversuch '; | ||
end | end | ||
for i = 1:16 | for i = 1:16 | ||
lcdData(i) = uint8(textStr(i)); | lcdData(i) = uint8(textStr(i)); | ||
end | end | ||
end | end | ||
</syntaxhighlight> | </syntaxhighlight> | ||
</small></small> | </small></small> | ||
| Zeile 598: | Zeile 597: | ||
%**************************************************************** | %**************************************************************** | ||
% Funktion : | % Funktion : Entprellfunktion_Reset * | ||
% * | |||
% Datei : Polar_Lock_Neu.slx * | |||
% * | % * | ||
% Datum : 28.11.2025 * | % Datum : 28.11.2025 * | ||
| Zeile 657: | Zeile 658: | ||
{| class="wikitable" | {| class="wikitable" | ||
|+ style = "text-align: left"| Tabelle: Komponententest (aktualisiert) | |+ style = "text-align: left"| Tabelle: Komponententest (aktualisiert: 15.12.2025) | ||
|- | |- | ||
! Nr. !! Anzahl !! Preis pro Stück !! Beschreibung !! Link !! Teststatus !! Testdatum | ! Nr. !! Anzahl !! Preis pro Stück !! Beschreibung !! Link !! Teststatus !! Testdatum | ||
| Zeile 688: | Zeile 689: | ||
<br> | <br> | ||
<gallery widths=" | <gallery widths="400px" heights="400px" > | ||
Datei:Systemintegration und Gesamttest 1.jpg|400px|Abb. | Datei:Systemintegration und Gesamttest 1.jpg|400px|Abb.12- Gesamttest Nr. 1 "falsche Kombination" | ||
Datei:Systemintegration und Gesamttest 2.jpg|400px|Abb. | Datei:Systemintegration und Gesamttest 2.jpg|400px|Abb.13- Gesamttest Nr. 2 "richtige Kombination" | ||
</gallery> | </gallery> | ||
= Ergebnis = | = Ergebnis = | ||
Das Projekt „Polarlock“ wurde erfolgreich realisiert. Sämtliche Anforderungen konnten erfüllt werden, und die im Projektverlauf aufgetretenen zahlreichen Herausforderungen wurden systematisch analysiert und gelöst. Die implementierten Sensoren erkennen zuverlässig die Magnetkonfiguration. Bei korrekter Reihenfolge leuchtet die grüne LED, bei falscher Reihenfolge wird die rote LED aktiviert. Auch das LCD-Display arbeitet zuverlässig und stellt die Systemzustände korrekt dar. | |||
'''Lösungen zu den Fragen''' | |||
1) Blau | |||
2) 2 | |||
3) Weiß | |||
4) 4 | |||
5) Schwarz | |||
6) 6 | |||
== Zusammenfassung == | == Zusammenfassung == | ||
=== Lessons Learned === | === Lessons Learned === | ||
Eine zentrale Erkenntnis aus dem Projekt betrifft die Planung und Zeitgestaltung. Zu Beginn hätten Ziele und Anforderungen klarer definiert werden müssen, um Verzögerungen zu vermeiden. Für zukünftige Projekte ist daher ein realistischerer Zeitplan mit ausreichenden Pufferzeiten, insbesondere für komplexe Aufgaben wie Programmierung und CAD-Konstruktion, erforderlich. | |||
Darüber hinaus zeigte sich, dass die Verwendung digitaler Hall-Sensoren die Implementierung unnötig erschwert hat. Analoge Hall-Sensoren hätten eine flexiblere und robustere Auswertung ermöglicht. Zudem brachte das gewählte Würfelkonzept Nachteile mit sich, da die digitalen Hall-Sensoren ihren letzten Zustand speichern und nach jedem erfolgreichen Spiel manuell mit einem Magneten zurückgesetzt werden müssen. Ohne diesen Reset wird beim nächsten Durchlauf erneut derselbe Zustand ausgegeben. | |||
== Projektunterlagen == | == Projektunterlagen == | ||
=== Projektplan === | === Projektplan === | ||
[[Datei:Gantt Diagramm MTR5 Polar Lock.jpg|1000px|thumb|links|Abb. | [[Datei:Gantt Diagramm MTR5 Polar Lock.jpg|1000px|thumb|links|Abb.14- Projektplan des Projekts "Polarlock"]] | ||
<br> | <br> | ||
| Zeile 729: | Zeile 751: | ||
Das Projekt folgt einem strukturierten Zeitplan und besteht aus fünf entscheidenden Phasen. Die Vorbereitungsphase legt den Grundstein für das Projekt: Erste Ideen werden entwickelt, in unsere Wiki-Seite eingetragen und finalisiert, bevor die endgültige Einkaufsliste erstellt wird. Darauf aufbauend beginnt die Planungsphase, in der der Projektplan erstellt, die bestellten Komponenten getestet und das CAD-Modell ausgearbeitet wird. Die zentrale Durchführungsphase startet am 06. November 2025. In dieser Phase werden wesentliche Arbeitsschritte umgesetzt, darunter der 3D-Druck des Gehäuses und die Erstellung des Simulink-Modells. Diese Phase läuft bis zum 15. Dezember 2025. Anschließend folgt die Testphase, in der die Schaltung und das Simulink-Modell einzeln geprüft, anschließend erstmals zusammen integriert und einem vollständigen Gesamttest unterzogen werden. Danach wird die Präsentation erstellt. Den Abschluss bildet die Teilnahme an der Projektmesse am 15. Januar 2026, bei der das Projekt den Besuchern vorgestellt wird. | Das Projekt folgt einem strukturierten Zeitplan und besteht aus fünf entscheidenden Phasen. Die Vorbereitungsphase legt den Grundstein für das Projekt: Erste Ideen werden entwickelt, in unsere Wiki-Seite eingetragen und finalisiert, bevor die endgültige Einkaufsliste erstellt wird. Darauf aufbauend beginnt die Planungsphase, in der der Projektplan erstellt, die bestellten Komponenten getestet und das CAD-Modell ausgearbeitet wird. Die zentrale Durchführungsphase startet am 06. November 2025. In dieser Phase werden wesentliche Arbeitsschritte umgesetzt, darunter der 3D-Druck des Gehäuses und die Erstellung des Simulink-Modells. Diese Phase läuft bis zum 15. Dezember 2025. Anschließend folgt die Testphase, in der die Schaltung und das Simulink-Modell einzeln geprüft, anschließend erstmals zusammen integriert und einem vollständigen Gesamttest unterzogen werden. Danach wird die Präsentation erstellt. Den Abschluss bildet die Teilnahme an der Projektmesse am 15. Januar 2026, bei der das Projekt den Besuchern vorgestellt wird. | ||
== Zip-Archiv== | |||
In diesem Zip-Ordner befinden sich alle Originaldateien für das Projekt: [[Datei: Polarlock WS25-26.zip ]] | |||
<br> | |||
<br> | |||
== Weblinks == | == Weblinks == | ||
Produktdatenblatt der Hall-Sensoren: https://cdn-reichelt.de/documents/datenblatt/B400/TLE49X5L.pdf | |||
Steuerung der Hall-Sensoren am Arduino: https://www.youtube.com/watch?v=feraKorln3o&t=243s | |||
Produktdatenblatt der Reset-Taste: https://asset.conrad.com/media10/add/160267/c1/-/en/000701280DS00/datenblatt-701280-tru-components-701280-gq-16f-s-vandalismusgeschuetzter-drucktaster-48-vdc-2-a-1-x-ausein-tastend-ip65-1-st.pdf | |||
Produktdatenblatt von Arduino Uno R3: https://docs.arduino.cc/resources/datasheets/A000066-datasheet.pdf | |||
Einführung in Simulink: https://www.uni-ulm.de/fileadmin/website_uni_ulm/iui.inst.050/vorlesungen/sose15/err/simulink_einfuhrung.pdf | |||
== Literatur == | == Literatur == | ||
Aktuelle Version vom 15. Januar 2026, 13:28 Uhr
| Autoren: | Barinder Singh, Yash Uppal |
| Betreuer: | Marc Ebmeyer |

Einleitung
Im Rahmen des Praktikums „Fachpraktikum Mechatronik“ im Studiengang Mechatronik an der Hochschule Hamm-Lippstadt wird ein kompaktes Escape-Game-Rätsel „Polar-Lock“ entwickelt, das Magnetismus und digitale Signalverarbeitung praktisch erfahrbar macht. Polar-Lock ist ein kompaktes Escape-Game-System, das die Grundlagen des Magnetismus mit Hall-Sensorik in einem eingebetteten Aufbau demonstriert.
Verwendet werden drei farbige, nummerierte Würfel (rot, blau, grün), in die jeweils ein Permanentmagnet so eingebaut ist, dass sein Nordpol eindeutig auf eine definierte, nummerierte Würfelseite zeigt. Die beigelegte Rätselzettel enthält Hinweise, welcher Würfel mit welcher nummerierten Seite in welchen Slot (A–C) zu legen ist. Elektronisch wird ausschließlich geprüft, ob je Slot ein Magnet vorhanden ist und ob dessen Polausrichtung (Nord/Süd) der Vorgabe entspricht. Farbe und Nummer dienen der Rätselführung, gehen aber nicht in die elektronische Bewertung ein. Unter jedem Slot befindet sich ein Hall-Effekt-Sensor, dessen digitales Signal durch den Arduino UNO R3 ausgewertet wird.
Der Start erfolgt über eine Start-Taste. Fehlermeldungen und das Endergebnis werden über ein LCD-Display (16×2) ausgegeben. Sind alle drei farbmarkierten Würfel in den vorgesehenen Slots (A–C) mit der jeweils korrekten Polrichtung (Nord/Süd) eingesetzt, meldet das System den Erfolg: Die grüne LED leuchtet und auf dem LCD-Display erscheint der dreistellige Code. Liegt hingegen eine Fehlbelegung vor, etwa durch einen falschen Slot oder eine falsche Polausrichtung, zeigt das Display die Meldung „Fehlversuch“, und die rote LED schaltet ein und bleibt aktiv, bis ein neuer Versuch über den Reset-Taster gestartet wird. In dieser verriegelten Phase werden weitere Änderungen an den Magneten nicht ausgewertet. Das System arbeitet vollständig offline, und befindet sich in einem kompakten, tragbaren 3D-gedruckten Gehäuse, das definierte Sensorabstände und eindeutig markierte Slots sicherstellt.
Schwierigkeitsgrad: Mittel
Lernziel: Mit Spaß am Experimentieren vertiefen die Besucher der Projektmesse Magnetismus (Hall-Effekt) und wenden Grundlagen der Elektrotechnik an, um die Rätsel zu lösen.
Bezug zum MTR Studium: Elektronik 1, Elektrotechnik 1&2, Informatik 1 (Praktikum), Informatik 2 (Praktikum)
So sehen die beigestellten Rätsel aus:
1) In der LED-Technik steht eine bestimmte Farbe für kurze Wellenlängen und hohe Signalwirkung bei Statusanzeigen. Welche Farbe ist das?
2) Ein digitales System arbeitet mit binären Signalen. Wie viele verschiedene Zustände kann ein einzelnes Bit annehmen?
3) In der Elektronik werden Skalen, Referenzflächen oder Anzeigen häufig in einer Farbe ausgeführt, die nahezu das gesamte sichtbare Licht reflektiert und dadurch besonders gut erkennbar ist. Welche Farbe ist das?
4) Ein digitaler Sensor erkennt „Signal vorhanden“ oder „kein Signal“. Kombiniert man diese Information mit zwei möglichen Magnetpolen, wie viele Zustandskombinationen ergeben sich insgesamt?
5) In der Elektrotechnik wird für Masse, Abschirmung oder inaktive Bereiche häufig eine sehr dunkle Farbe verwendet. Welche Farbe ist das?
6) Ein digitaler Codeträger besitzt mehrere klar unterscheidbare Zustände. Entspricht die Anzahl dieser Zustände der Seitenzahl eines klassischen Würfels, wie viele Zustände sind das?
Die sechs Rätselaufgaben des Polarlocks sind so gestaltet, dass die Besucher der Projektmesse mithilfe grundlegender Kenntnisse aus der Elektrotechnik, Digitaltechnik und dem Magnetismus die richtige Kombination der drei Würfel ermitteln können. Die erste, dritte und fünfte Frage liefern Informationen, aus denen sich jeweils die korrekte Farbe des Würfels in den drei Slots ableiten lässt. Die zweite, vierte und sechste Frage beziehen sich hingegen auf die richtige Orientierung bzw. nummerierte Seite des jeweiligen Würfels und verknüpfen damit logisches Denken mit einfachen physikalischen und elektronischen Grundlagen.
Anforderungen
| ID | Inhalt | Priorität | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|---|
| 1 | Das Spiel muss in maximal 5 Minuten lösbar sein. | Hoch | Singh/Uppal | 03.10.2025 | Singh | 15.12.2025 |
| 2 | Eine Auswahl passender elektronischer Komponenten muss erfolgen. | Hoch | Singh/Uppal | 03.10.2025 | Singh | 15.12.2025 |
| 3 | Die Konstruktion der benötigten CAD-Modelle für mechanische Bauteile muss erfolgen. | Hoch | Singh/Uppal | 03.10.2025 | Singh | 15.12.2025 |
| 4 | Die Verdrahtung aller elektronischen Komponenten mit dem Mikrocontroller muss vollständig umgesetzt und funktionsfähig sein. | Hoch | Singh/Uppal | 03.10.2025 | Singh | 15.12.2025 |
| 5 | Das Spiel startet beim Drücken von Taste 1 (Start-Button). | Hoch | Singh/Uppal | 03.10.2025 | Singh | 15.12.2025 |
| 6 | Den Spielern wird per Ausdruck ein Rätseltext bereitgestellt, der die Lösungsvoraussetzungen für das Magnetwürfel-Puzzle vollständig beschreibt. | Hoch | Singh/Uppal | 03.10.2025 | Singh | 15.12.2025 |
| 7 | Die korrekte Lösung des Rätsels führt dazu, dass jeder Würfel mit der richtigen nummerierten Seite in den jeweiligen korrekten Slots gelegt wird. | Hoch | Singh/Uppal | 03.10.2025 | Singh | 15.12.2025 |
| 8 | Die Rätsel haben einen mittleren Schwierigkeitsgrad. | Hoch | Singh/Uppal | 03.10.2025 | Singh | 15.12.2025 |
| 9 | Je Slot (A/B/C) wird Magnetpräsenz und korrekte Polorientierung (N/S) über ein Hallsenor detektiert. | Hoch | Singh/Uppal | 03.10.2025 | Uppal | 15.12.2025 |
| 10 | Wenn alle Würfel korrekt platziert und ausgerichtet sind, leuchtet die grüne LED und der dreistellige Code wird auf dem LCD-Display 16×2 ausgegeben. | Hoch | Singh/Uppal | 03.10.2025 | Uppal | 15.12.2025 |
| 11 | Ein Reset-Taster (Taste 2) erlaubt Neustart nach Spielende oder Fehlversuch. | Hoch | Singh/Uppal | 03.10.2025 | Uppal | 15.12.2025 |
| 12 | Wenn mindestens ein Würfel falsch liegt, zeigt das LCD „Fehlversuch“; die rote LED leuchtet dauerhaft, bis ein neuer Versuch mit dem Reset-Taster gestartet wird. | Hoch | Singh/Uppal | 03.10.2025 | Uppal | 15.12.2025 |
| 13 | Die erforderlichen CAD-Modelle, Datenblätter und Programmdaten müssen dokumentiert werden. | Hoch | Singh/Uppal | 03.10.2025 | Uppal | 15.12.2025 |
| 14 | Ein Wiki-Artikel muss nach Anleitung fertiggestellt werden. | Hoch | Singh/Uppal | 03.10.2025 | Uppal | 15.12.2025 |
Funktionaler Systementwurf/ Technischer Systementwurf
Polar-Lock ist ein eingebettetes Rätselsystem, dass die korrekte Polorientierung der drei farbig markierten, seitennummerierten Würfel mit eingebauten Magneten in den Slots A–C prüft und bei Erfolg einen dreistelligen Code ausgibt. Der beigelegte Rätselzettel enthält Rätsel, die korrekt gelöst werden müssen. Die korrekte Lösung des Rätsels führt dazu, dass jeder Würfel mit der richtigen nummerierten Seite in den jeweiligen korrekten Slots gelegt wird. Farben der Würfel (rot/blau/grün) dienen ausschließlich als Rätselhinweis; das System prüft nur Slot und Polung. Elektronisch werden ausschließlich Magnetpräsenz und Polrichtung bewertet. Die Hardware basiert auf einem Arduino UNO R3 mit drei digitalen Hall-Schaltern vom Typ Infineon TLE4935L (bipolarer Latch), einem LCD-Display 16×2 mit I²C-Backpack, einer Start- und einer Reset-Taste sowie zwei LEDs (grün/rot). Pro Slot sitzt ein TLE4935L direkt unter der Auflagefläche des Würfels. Der TLE4935L verfügt über einen Open-Collector-Ausgang und liefert ein digitales Signal, das abhängig von der anliegenden magnetischen Polorientierung schaltet. Als Latch hält der Sensor seinen Schaltzustand, bis ein Magnetfeld der entgegengesetzten Polung erkannt wird. Die Sensorsignale werden an den digitalen Eingängen D2, D3 und D4 des Arduino UNO R3 eingelesen und zur Auswertung der korrekten Polorientierung je Slot herangezogen. Die Tasten liegen an D5 (Start) und D6 (Reset). Der Start-Taster beginnt das Spiel und der Reset-Taster setzt den Spielzustand zurück.
Der Ablauf des Spiels ist: nach dem Einschalten zeigt das LCD „Bereit – Start drücken“, beide LEDs sind aus. Mit dem Startsignal liest der Mikrocontroller die drei Hall-Eingänge in einem kurzen Stabilitätsfenster (Entprellung/Filter, z. B. 30–100 ms). Wenn alle drei Würfel vom Spieler in den Slots gelegt werden, vergleicht das System das Ergebnis mit der vorgegebenen Lösung (N/S je Slot). Sind alle Vorgaben erfüllt, leuchtet die grüne LED und der dreistellige Code wird ausgegeben. Liegt mindestens ein Würfel mit der falschen Polung, zeigt das LCD „Fehlversuch“ und die rote LED bleibt an, bis die Reset-Taste gedrückt wird.
Abbildung 1 zeigt den funktionalen Systementwurf. In den Abbildungen 2 und 4 sind jeweils die technische Schaltung und der technische Systementwurf dargestellt. Die Abbildung 3 legt den Schaltplan des Polarlocks dar.




Technischer Systementwurf
Der in der Abbildung dargestellte technische Systementwurf zeigt die Architektur des Arduino-basierten Escape-Game-Moduls „Polarlock“. Der Arduino UNO R3 übernimmt die zentrale Verarbeitung der Eingangssignale. Die von den Hall-Sensoren erfassten magnetischen Zustände werden softwareseitig ausgewertet und mit einer vorgegebenen Soll-Konfiguration verglichen.
Eingabekomponenten
• Hall-Sensoren (Slot A–C): Drei digitale Hall-Sensoren sind an den digitalen Eingängen D2, D3 und D4 des Arduino UNO R3 angeschlossen. Sie dienen zur Erkennung der magnetischen Polarität bzw. Anwesenheit von Magneten in den jeweiligen Slots des Spielmoduls.
• Start-Taster: Der Start-Taster ist am digitalen Eingang D5 angeschlossen und dient zur Initialisierung des Spiels bzw. zum Starten der Code-Überprüfung.
• Reset-Taster: Der Reset-Taster ist am digitalen Eingang D6 angeschlossen und ermöglicht das Zurücksetzen des Systems in den Ausgangszustand.
• Spannungsversorgung: Eine externe Spannungsquelle versorgt den Arduino sowie die angeschlossenen Peripheriekomponenten mit Betriebsspannung.
Ausgabekomponenten
• LCD-Display: Das LCD-Display wird vom Arduino angesteuert und dient zur Ausgabe von Statusmeldungen, Benutzerhinweisen sowie Spielrückmeldungen (z. B. „bereit“, „Fehlversuch“, „Erfolg“).
• Grüne LED: signalisiert, dass alle Würfel mit der richtigen Seite in die jeweiligen richtigen Slots platziert wurden.
• Rote LED: signalisiert einen Fehlversuch.
Komponentenspezifikation
| Nr. | Anzahl | Preis pro Stück | Beschreibung | Link |
|---|---|---|---|---|
| 1 | 3 | 0,99€ | Hallsensor, digital, bipolar, latch, 3,8 - 24 V | [1] |
| 2 | 1 | 20,80€ | Microkontroller: Arduino Uno R3 | [2] |
| 3 | 1 | 3,78€ | I2C LCD 1602 16x2 Module | [3] |
| 4 | div. | - | Widerstände | werden durch die Hochschule zur Verfügung gestellt |
| 5 | 1 | 3,90€ | Netzteil für Mikrocontroller - 9V, 1A | [4] |
| 6 | 1 | 5,99€ | Taster TRU COMPONENTS 701280 GQ 16F-S Vandalismusgeschützter Drucktaster 48 V/DC 2 A 1 x Aus/(Ein) tastend IP65 | [5] |
| 7 | 1 | 1,99€ | An/Aus-Schalter TRU COMPONENTS 700185 Wippschalter R13-112A B/B 0-I 250 V/AC 6 A 1 x Aus/Ein rastend | [6] |
| 8 | 2 | - | LEDs (Grün/Rot) | werden durch die Hochschule zur Verfügung gestellt |
| 9 | div. | - | Verbindungskabeln | werden durch die Hochschule zur Verfügung gestellt |
| 10 | 3 | 1,29€ | PIC-M0805 Permanent-Magnet Rund (Ø x L) 8 mm x 5 mm N35 1.19 T (max) | [7] |
| 11 | 1 | - | 3D-Druck Gehäuse | Das Modell wird aus den CAD-Daten generiert und im 3D-Druck gefertigt |
| - |
Hall-Sensoren
Ein Hall-Sensor besteht aus einem dünnen Halbleiterplättchen, durch das ein elektrischer Strom fließt. Wirkt ein Magnetfeld senkrecht auf dieses Plättchen ein, werden die Ladungsträger im Halbleiter durch die Lorentzkraft abgelenkt. Dadurch entsteht eine elektrische Spannung quer zur Stromrichtung, die sogenannte Hall-Spannung. Die Höhe dieser Spannung ist proportional zur Stärke des einwirkenden Magnetfeldes.
Beim im Projekt verwendeten Sensor handelt es sich um einen digitalen Hall-Sensor vom Typ Infineon TLE4935L, der als bipolarer Latch ausgeführt ist. Der Sensor kann Nord- und Südpol erkennen. Abhängig von der anliegenden Polung schaltet der Sensor seinen digitalen Open-Collector-Ausgang entweder in einen LOW- oder HIGH-Zustand. Als Latch speichert der TLE4935L diesen Schaltzustand und hält ihn so lange, bis ein Magnetfeld der entgegengesetzten Polung erkannt wird oder zurückgesetzt wird.
Im Gegensatz zu analogen Hall-Sensoren liefert der TLE4935L kein kontinuierliches Spannungssignal, sondern ein stabiles digitales Signal, das zur zuverlässigen Erkennung der Polorientierung eines Magneten geeignet ist. Diese Eigenschaft macht den Sensor besonders geeignet für Anwendungen wie Polar-Lock, bei denen eine eindeutige und reproduzierbare Zustandsentscheidung erforderlich ist.
Pinbelegung der Hall-Sensoren:
• 1 = Versorgungsspannung (5V)
• 2 = GND (0V)
• 3 = Data (Digitial in Pin 3, 4, 6)
LCD-Display
Als Display kommt "1602 I2C LCD Modul mit HD44780" zum Einsatz. Dieses verfügt über die folgende Eigenschaften:
• 2 Zeichenreihen, jeweils 16 Zeichen pro Reihe
• Display mit blauer Hintergrundbeleuchtung und weißer Schrift
• Betriebsspannung: 5V
• Pinbelegung: 4 Pins (VCC, GND, SDA, SCL)
• I2C HD44780 Modul ist direkt mit dem LCD verlötet
Arduino Uno R3
Als Mikrocontroller kommt ein Arduino Uno R3 (DIP-Variante) zum Einsatz, der über folgende Eigenschaften besitzt:
• Betriebsspannung: 5 V
• 14 digitale I/O - Schnittstellen, 6 analoge Eingänge
• ATmega328P, 8-Bit AVR RISC
• Flash Memory: 32 KByte
• SRAM : 2 KByte
• EEPROM: 1 KByte
• Takt: 16 MHz
Umsetzung (Hardware/Software)
Hardware
Das Gehäuse der Hardware wurde für die Fertigung im 3D-Druckverfahren ausgelegt. Hierzu wurden mit der Software SolidWorks mehrere CAD-Modelle der einzelnen Bauelemente erstellt. Diese sind im Folgenden dargestellt:
Die Abbildung 4 zeigt die Gesamte Baugruppe des Polarlocks. In der Frontfläche befindet sich eine kreisförmige Aussparung, die für Reset Taster vorgesehen ist. Daneben ist eine rechteckige Öffnung integriert, welche für die Montage des LCD-Displays dient. Unterhalb des Displays sind die Platzierungen für die Würfel angeordnet. Diese Bereiche sind so gestaltet, dass die Würfel eindeutig positioniert werden können. In Abbildung 5 ist eine einzelne Würfel. Im Inneren des Würfel befindet sich eine Ausschnitt für das Magnet zur erkennung der Würfelposition. Abbildung 6 zeigt die Unterseite der Baugruppe, welche als Trägerstruktur für die gesamte Konstruktion dient. Sie bildet die mechanische Basis und ermöglicht die Befestigung weitere Komponenten wie z.B. Arduino, Elektronik und Sensoren.



Software
Programmablaufplan
In Abbildung 9 ist der Programmablaufplan des Polarlocks dargestellt.

Simulink-Modell
Die Abbildung 9 legt das Simulink-Modell des Polarlocks dar. Das Modell ist farblich markiert, um die Signalflüsse erkenntlich zu machen. Gelb markierte Blöcke stellen die Eingänge dar: Dazu gehören die drei Hall-Sensoren an den digitalen Pins 3, 4 und 6, die jeweils ein digitales Signal zur Magneterkennung liefern, sowie die Reset-Taste an Pin 9. Das Reset-Signal wird zusätzlich durch einen Entprell-Block geführt, um ein stabiles, störungsfreies Eingangssignal zu erzeugen. Der graue Block in der Mitte bildet die zentrale Spiellogik, in der alle Eingangssignale zusammengeführt und ausgewertet werden. Grün markierte Blöcke kennzeichnen die Ausgänge: Eine grüne LED an Pin 11 signalisiert einen erfolgreichen Spielabschluss und die rote LED an Pin 12 zeigt einen Fehlversuch. Über den LCD-Ausgang werden Statusmeldungen und Textinformationen an ein über die I²C-Schnittstelle angebundenes Display übertragen und dort angezeigt.

Spiellogik
Der Block „Polarlock_Logik“ ist ein MATLAB-Simulink-Subsystem. Dieser stellt die zentrale Spiellogik des Systems dar und besitzt klar definierte Ein- und Ausgänge. Im Anschluss an die Abbildung des Subsystems „Spiel_Logik“ folgt der zugehörige MATLAB-Code, der die interne Spiellogik implementiert.

|
|
Taster Entprellen
Die Funktion Entprellfunktion_Reset dient zur Entprellung der Reset-Taste. Das rohe Eingangssignal resetRaw wird nur dann als gültiger Reset erkannt, wenn es über mehrere aufeinanderfolgenden Abtastungen hinweg den Wert 1 besitzt. Dazu wird ein Zähler verwendet, der bei jedem High-Signal erhöht und bei einem Low-Signal zurückgesetzt wird. Erst wenn die definierte Entprellzeit von 20ms erreicht ist, wird das entprellte Reset-Signal resetDeb gesetzt und ausgegeben.
|
|
Komponententest
| Nr. | Anzahl | Preis pro Stück | Beschreibung | Link | Teststatus | Testdatum |
|---|---|---|---|---|---|---|
| 1 | 3 | 0,99€ | Hallsensor, digital, bipolar, latch, 3,8 - 24 V | [8] | getestet | 20.10.2025 |
| 2 | 1 | 20,80€ | Microkontroller: Arduino Uno R3 | [9] | getestet | 20.10.2025 |
| 3 | 1 | 3,78€ | I2C LCD 1602 16x2 Module | [10] | getestet | 20.10.2025 |
| 4 | div. | - | Widerstände | werden durch die Hochschule zur Verfügung gestellt | Kein Test notwendig | - |
| 5 | 1 | 3,90€ | Netzteil für Mikrocontroller - 9V, 1A | [11] | getestet | 20.10.2025 |
| 6 | 1 | 5,99€ | Taster TRU COMPONENTS 701280 GQ 16F-S Vandalismusgeschützter Drucktaster 48 V/DC 2 A 1 x Aus/(Ein) tastend IP65 | [12] | getestet | 20.10.2025 |
| 7 | 1 | 1,99€ | An/Aus-Schalter TRU COMPONENTS 700185 Wippschalter R13-112A B/B 0-I 250 V/AC 6 A 1 x Aus/Ein rastend | [13] | getestet | 20.10.2025 |
| 8 | 2 | - | LEDs (Grün/Rot) | werden durch die Hochschule zur Verfügung gestellt | getestet | 20.10.2025 |
| 9 | div. | - | Verbindungskabeln | werden durch die Hochschule zur Verfügung gestellt | Kein Test notwendig | - |
| 10 | 3 | 1,29€ | PIC-M0805 Permanent-Magnet Rund (Ø x L) 8 mm x 5 mm N35 1.19 T (max) | [14] | getestet | 20.10.2025 |
| 11 | 1 | - | 3D-Druck Gehäuse | Das Modell wird aus den CAD-Daten generiert und im 3D-Druck gefertigt | getestet | 20.12.2025 |
| - |
-
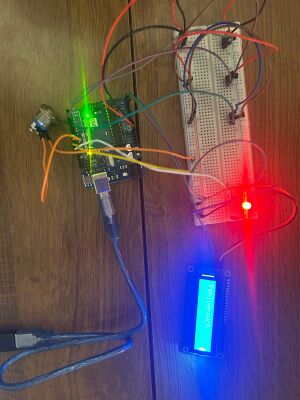 Abb.12- Gesamttest Nr. 1 "falsche Kombination"
Abb.12- Gesamttest Nr. 1 "falsche Kombination" -
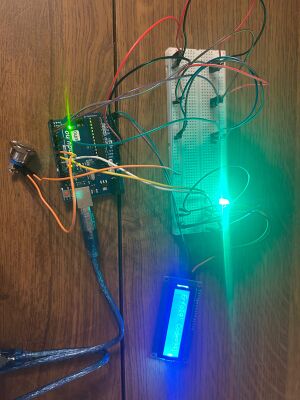 Abb.13- Gesamttest Nr. 2 "richtige Kombination"
Abb.13- Gesamttest Nr. 2 "richtige Kombination"


Ergebnis
Das Projekt „Polarlock“ wurde erfolgreich realisiert. Sämtliche Anforderungen konnten erfüllt werden, und die im Projektverlauf aufgetretenen zahlreichen Herausforderungen wurden systematisch analysiert und gelöst. Die implementierten Sensoren erkennen zuverlässig die Magnetkonfiguration. Bei korrekter Reihenfolge leuchtet die grüne LED, bei falscher Reihenfolge wird die rote LED aktiviert. Auch das LCD-Display arbeitet zuverlässig und stellt die Systemzustände korrekt dar.
Lösungen zu den Fragen
1) Blau
2) 2
3) Weiß
4) 4
5) Schwarz
6) 6
Zusammenfassung
Lessons Learned
Eine zentrale Erkenntnis aus dem Projekt betrifft die Planung und Zeitgestaltung. Zu Beginn hätten Ziele und Anforderungen klarer definiert werden müssen, um Verzögerungen zu vermeiden. Für zukünftige Projekte ist daher ein realistischerer Zeitplan mit ausreichenden Pufferzeiten, insbesondere für komplexe Aufgaben wie Programmierung und CAD-Konstruktion, erforderlich.
Darüber hinaus zeigte sich, dass die Verwendung digitaler Hall-Sensoren die Implementierung unnötig erschwert hat. Analoge Hall-Sensoren hätten eine flexiblere und robustere Auswertung ermöglicht. Zudem brachte das gewählte Würfelkonzept Nachteile mit sich, da die digitalen Hall-Sensoren ihren letzten Zustand speichern und nach jedem erfolgreichen Spiel manuell mit einem Magneten zurückgesetzt werden müssen. Ohne diesen Reset wird beim nächsten Durchlauf erneut derselbe Zustand ausgegeben.
Projektunterlagen
Projektplan

Projektdurchführung
Das Projekt folgt einem strukturierten Zeitplan und besteht aus fünf entscheidenden Phasen. Die Vorbereitungsphase legt den Grundstein für das Projekt: Erste Ideen werden entwickelt, in unsere Wiki-Seite eingetragen und finalisiert, bevor die endgültige Einkaufsliste erstellt wird. Darauf aufbauend beginnt die Planungsphase, in der der Projektplan erstellt, die bestellten Komponenten getestet und das CAD-Modell ausgearbeitet wird. Die zentrale Durchführungsphase startet am 06. November 2025. In dieser Phase werden wesentliche Arbeitsschritte umgesetzt, darunter der 3D-Druck des Gehäuses und die Erstellung des Simulink-Modells. Diese Phase läuft bis zum 15. Dezember 2025. Anschließend folgt die Testphase, in der die Schaltung und das Simulink-Modell einzeln geprüft, anschließend erstmals zusammen integriert und einem vollständigen Gesamttest unterzogen werden. Danach wird die Präsentation erstellt. Den Abschluss bildet die Teilnahme an der Projektmesse am 15. Januar 2026, bei der das Projekt den Besuchern vorgestellt wird.
Zip-Archiv
In diesem Zip-Ordner befinden sich alle Originaldateien für das Projekt: Datei:Polarlock WS25-26.zip
Weblinks
Produktdatenblatt der Hall-Sensoren: https://cdn-reichelt.de/documents/datenblatt/B400/TLE49X5L.pdf
Steuerung der Hall-Sensoren am Arduino: https://www.youtube.com/watch?v=feraKorln3o&t=243s
Produktdatenblatt der Reset-Taste: https://asset.conrad.com/media10/add/160267/c1/-/en/000701280DS00/datenblatt-701280-tru-components-701280-gq-16f-s-vandalismusgeschuetzter-drucktaster-48-vdc-2-a-1-x-ausein-tastend-ip65-1-st.pdf
Produktdatenblatt von Arduino Uno R3: https://docs.arduino.cc/resources/datasheets/A000066-datasheet.pdf
Einführung in Simulink: https://www.uni-ulm.de/fileadmin/website_uni_ulm/iui.inst.050/vorlesungen/sose15/err/simulink_einfuhrung.pdf
Literatur
→ zurück zur Übersicht: WS 25/26: Escape Game