TrackePrisma.m: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Keine Bearbeitungszusammenfassung |
|||
| (45 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
'''Autor:''' [[Benutzer:Jan_Steffens]] | |||
'''Autor:''' [[Benutzer: | |||
= Einleitung/Funktion = | = Einleitung/Funktion = | ||
Die Funktion trackePrisma.m stellt die Bluetooth Verbindung zur [[Referenzmessung_mit_der_Topcon_Robotic_Total_Station | TopCon ]] her und stellt Referenzpunkte für die ausgelagerte Koordinatentransformation bereit. Außerdem verwendet sie PositionserfassungPrisma.m zur Bluetooth Datenübertragung mit der TopCon Station, welche KosTrafoTzuWelt.m zur Koordinatentransformation verwendet. | |||
= Anforderungen = | = Anforderungen = | ||
{| class="wikitable" | {| class="wikitable" | ||
|+ style = "text-align: left"|Tabelle 1: Anforderungen an das | |+ style = "text-align: left"|Tabelle 1: Anforderungen an die Funktion | ||
|- | |||
! ID !! Inhalt !! Prio!! Ersteller !! Datum !! Geprüft von | |||
|- | |||
| 1 || Ein Punkt im T-KOS muss in das W-KOS transformiert werden || 1 || J.Steffens || 03.10.2025 || L. Berkemeier | |||
|- | |- | ||
| 2 || Übermittlung der T-Koordinaten || 1 || J.Steffens || 03.10.2025 || L. Berkemeier | |||
|- | |- | ||
| | | 3 || Rückgabe der W-Koordinaten || 1 || J.Steffens || 03.10.2025 || L. Berkemeier | ||
|- | |- | ||
|} | |} | ||
= Softwareentwurf = | = Softwareentwurf = | ||
<gallery widths="400px" heights="600px" > | |||
Datei:trackePrisma.m_PAP.png|Abb. 1: trackePrisma.m | |||
Datei:PositionserfassungPrisma_PAP.png|Abb. 2: PositionserfassungPrisma.m | |||
</gallery> | |||
= Umsetzung = | = Umsetzung = | ||
SVN- | SVN-Links: | ||
* [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/m-files/trackePrisma.m trackePrisma.m] | |||
* [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/m-files/PositionserfassungPrisma.m PositionserfassungPrisma.m] | |||
* [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/m-files/KosTrafoTzuWelt.m KosTrafoTzuWelt.m] | |||
= Komponententest = | |||
{| class="wikitable" | {| class="wikitable" | ||
! style="font-weight: bold;" | ID | ! style="font-weight: bold;" | ID | ||
! style="font-weight: bold;" | Testfallbeschreibung | ! style="font-weight: bold;" | Testfallbeschreibung | ||
! style="font-weight: bold;" | | ! style="font-weight: bold;" | Eingang | ||
! style="font-weight: bold;" | Erwartetes Ergebnis | ! style="font-weight: bold;" | Erwartetes Ergebnis | ||
! style="font-weight: bold;" | Testergebnis | ! style="font-weight: bold;" | Testergebnis | ||
! style="font-weight: bold;" | Testperson | ! style="font-weight: bold;" | Testperson | ||
! style="font-weight: bold;" | Datum | ! style="font-weight: bold;" | Datum | ||
|+ style = "text-align: left"|Tabelle | |+ style = "text-align: left"|Tabelle 2: Testbericht für den Komponententest | ||
|- | |- | ||
| 1 | | 1 | ||
| | | Bluetooth Verbindung TopCon zu PC kann hergestellt werden | ||
| | | | ||
| | | >> BT Verbindung hergestellt | ||
| | | Bluetooth Verbindung wurde hergestellt | ||
| | | Jan Steffens | ||
| | | 07.10.2025 | ||
|- | |- | ||
| 2 | | 2 | ||
| | | Übermittlung der T-Koordinaten | ||
| | | Prisma Position | ||
| | | Ausgabe von T-Koordinaten | ||
| | | T-Koordinaten wurden übermittelt | ||
| | | Jan Steffens | ||
| | | 07.10.2025 | ||
|- | |- | ||
| 3 | | 3 | ||
| | | Rückgabe der W-Koordinaten | ||
| | | Prisma Position | ||
| | | Rückgabe von W-Koordinaten | ||
| | | W-Koordinaten wurden zurückgegeben | ||
| | | Jan Steffens | ||
| | | 07.10.2025 | ||
|- | |- | ||
| | |} | ||
=Modultest= | |||
| | |||
| | * [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Software/AlphaBot/Test/TestklasseKosTrafoTzuWelt.m TestklasseKosTrafoTzuWelt.m] | ||
| | {| class="wikitable" | ||
| | ! style="font-weight: bold;" | ID | ||
! style="font-weight: bold;" | Testfallbeschreibung | |||
! style="font-weight: bold;" | Eingang | |||
! style="font-weight: bold;" | Erwartetes Ergebnis | |||
! style="font-weight: bold;" | Testergebnis | |||
! style="font-weight: bold;" | Testperson | |||
! style="font-weight: bold;" | Datum | |||
|+ style = "text-align: left"|Tabelle 3: Testbericht für den Modultest | |||
|- | |- | ||
| | | 1 | ||
| | | Überprüfung auf Vorhandensein des Skripts | ||
| | | Skript ([https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Software/AlphaBot/m-files/KosTrafoTzuWelt.m KosTrafoTzuWelt.m]) | ||
| | | Skript ist vorhanden | ||
| | | Skript ist vorhanden | ||
| | | Jan Steffens | ||
| | | 08.01.2026 | ||
|- | |- | ||
| | | 2 | ||
| | | Transformation von PT | ||
| 0. | | PT (TKos) = [0.00;2.96;-0.14] | ||
| PW (WKos) = [5.82;0.0041;0.01] | |||
| | | PW (WKos) = [5.82;0.0041;0.01] | ||
| Jan Steffens | |||
| | | 08.01.2026 | ||
|- | |- | ||
| | | 3 | ||
| | | Transformation von RefA | ||
| | | RefA (TKos) = [-3.99;2.95;-0.13] | ||
| RefA (WKos) = [1.83;0.0;0.0] | |||
| | | RefA (WKos) = [1.83;0.0;0.0] | ||
| Jan Steffens | |||
| | | 08.01.2026 | ||
|- | |- | ||
| | | 4 | ||
| | | Transformation von RefB | ||
| | | RefB (TKos) = [1.66;2.97;-0.14] | ||
| RefB (WKos) = [7.48;0.0;0.01] | |||
| RefB (WKos) = [7.48;0.0;0.01] | |||
| Jan Steffens | |||
| 08.01.2026 | |||
| | |||
| | |||
| | |||
| | |||
|- | |- | ||
|} | |} | ||
<gallery widths="400px" heights="300px" > | |||
Datei:TestklasseKosTrafoTzuWelt.png|Abb. 3: Testergebnis von TestklasseKosTrafoTzuWelt.m | |||
</gallery> | |||
---- | ---- | ||
→ zurück zum Hauptartikel: [[ | → zurück zum Hauptartikel: [[SDE WS25: AP 1.1 Positionsmessung des AlpaBot]] | ||
Aktuelle Version vom 8. Januar 2026, 13:39 Uhr
Autor: Benutzer:Jan_Steffens
Einleitung/Funktion
Die Funktion trackePrisma.m stellt die Bluetooth Verbindung zur TopCon her und stellt Referenzpunkte für die ausgelagerte Koordinatentransformation bereit. Außerdem verwendet sie PositionserfassungPrisma.m zur Bluetooth Datenübertragung mit der TopCon Station, welche KosTrafoTzuWelt.m zur Koordinatentransformation verwendet.
Anforderungen
| ID | Inhalt | Prio | Ersteller | Datum | Geprüft von |
|---|---|---|---|---|---|
| 1 | Ein Punkt im T-KOS muss in das W-KOS transformiert werden | 1 | J.Steffens | 03.10.2025 | L. Berkemeier |
| 2 | Übermittlung der T-Koordinaten | 1 | J.Steffens | 03.10.2025 | L. Berkemeier |
| 3 | Rückgabe der W-Koordinaten | 1 | J.Steffens | 03.10.2025 | L. Berkemeier |
Softwareentwurf
-
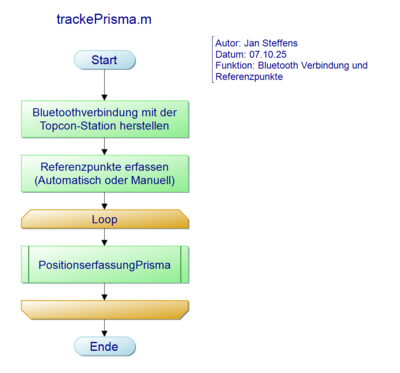 Abb. 1: trackePrisma.m
Abb. 1: trackePrisma.m -
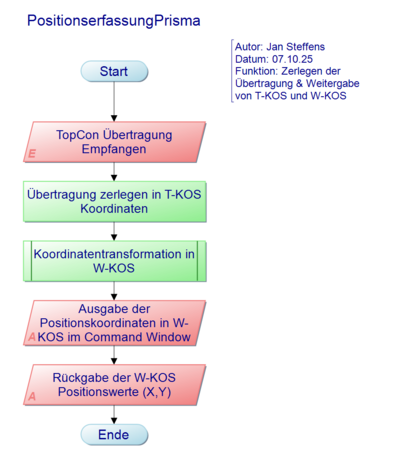 Abb. 2: PositionserfassungPrisma.m
Abb. 2: PositionserfassungPrisma.m


Umsetzung
SVN-Links:
Komponententest
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | Bluetooth Verbindung TopCon zu PC kann hergestellt werden | >> BT Verbindung hergestellt | Bluetooth Verbindung wurde hergestellt | Jan Steffens | 07.10.2025 | |
| 2 | Übermittlung der T-Koordinaten | Prisma Position | Ausgabe von T-Koordinaten | T-Koordinaten wurden übermittelt | Jan Steffens | 07.10.2025 |
| 3 | Rückgabe der W-Koordinaten | Prisma Position | Rückgabe von W-Koordinaten | W-Koordinaten wurden zurückgegeben | Jan Steffens | 07.10.2025 |
Modultest
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | Überprüfung auf Vorhandensein des Skripts | Skript (KosTrafoTzuWelt.m) | Skript ist vorhanden | Skript ist vorhanden | Jan Steffens | 08.01.2026 |
| 2 | Transformation von PT | PT (TKos) = [0.00;2.96;-0.14] | PW (WKos) = [5.82;0.0041;0.01] | PW (WKos) = [5.82;0.0041;0.01] | Jan Steffens | 08.01.2026 |
| 3 | Transformation von RefA | RefA (TKos) = [-3.99;2.95;-0.13] | RefA (WKos) = [1.83;0.0;0.0] | RefA (WKos) = [1.83;0.0;0.0] | Jan Steffens | 08.01.2026 |
| 4 | Transformation von RefB | RefB (TKos) = [1.66;2.97;-0.14] | RefB (WKos) = [7.48;0.0;0.01] | RefB (WKos) = [7.48;0.0;0.01] | Jan Steffens | 08.01.2026 |
-
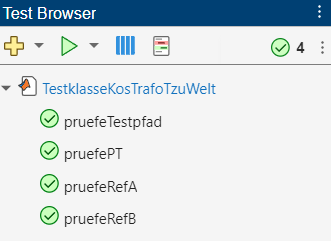 Abb. 3: Testergebnis von TestklasseKosTrafoTzuWelt.m
Abb. 3: Testergebnis von TestklasseKosTrafoTzuWelt.m

→ zurück zum Hauptartikel: SDE WS25: AP 1.1 Positionsmessung des AlpaBot