Workshop 2 - SenGier/SabGier - Gruppe 2 - SoSe2024: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Keine Bearbeitungszusammenfassung |
|||
| Zeile 1: | Zeile 1: | ||
< | '''Autoren: [[Benjamin Dilly]] & [[Benutzer:Kevin Mudczinski|Kevin Mudczinski]]''' <br/> | ||
[https://wiki.hshl.de/wiki/index.php/Hauptseite Hauptseite]<br/> | |||
[https://wiki.hshl.de/wiki/index.php/Praktikum_SDE SDE Praktikum]<br/> | |||
[https://wiki.hshl.de/wiki/index.php/SDE-Team_2023/24 SDE-Team 2023/24]<br/> | |||
[https://wiki.hshl.de/wiki/index.php/SoSe23_-_Praktikum_Systementwurf_-_Lernzielkontrolle_1 Lernzielkontrolle 1]<br/> | |||
== Beschreibung == | == Beschreibung == | ||
Der Gierratensensor misst eine Drehrate diese wird durch die Signalverarbeitung in einen Winkel in Grad° umgewandelt. | Der Gierratensensor misst eine Drehrate diese wird durch die Signalverarbeitung in einen Winkel in Grad° umgewandelt. | ||
Version vom 25. April 2024, 07:40 Uhr
Autoren: Benjamin Dilly & Kevin Mudczinski
Hauptseite
SDE Praktikum
SDE-Team 2023/24
Lernzielkontrolle 1
Beschreibung
Der Gierratensensor misst eine Drehrate diese wird durch die Signalverarbeitung in einen Winkel in Grad° umgewandelt.
Messketten
Offline
-
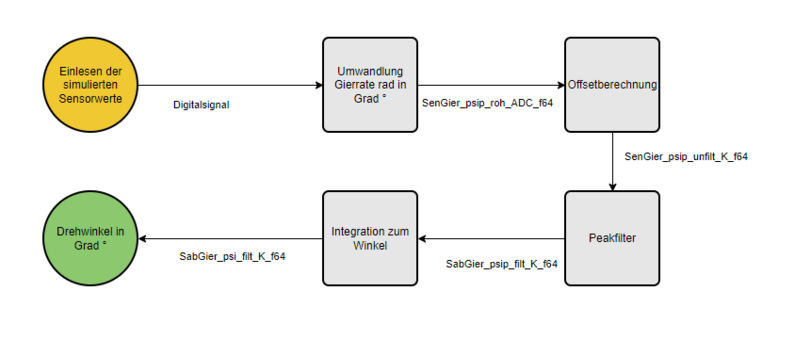
Abbildung 1: Messkette Gyro-Sensor im Offline Simulink Modell.

-
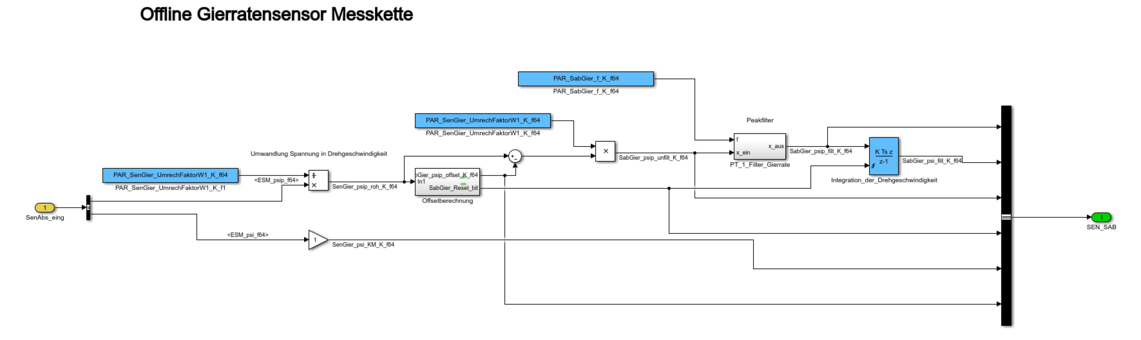
Abbildung 2: Messkette Gyro-Sensor im Offline Simulink Modell als Auszug aus dem Gesamtmodell.

Online
-
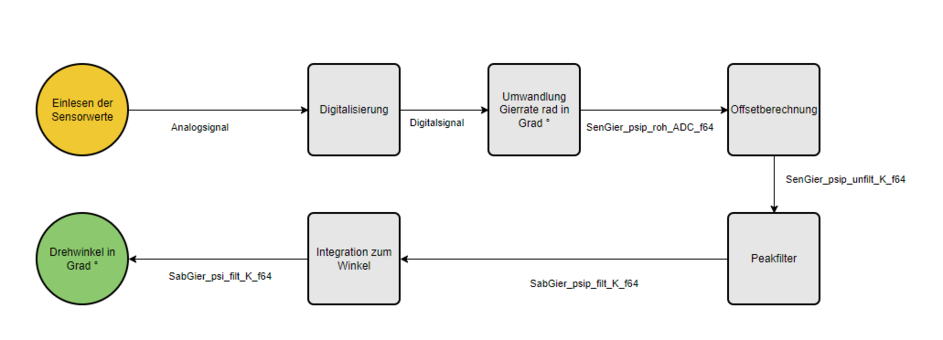
Abbildung 3: Messkette Gyro-Sensor im Online Simulink Modell.

-
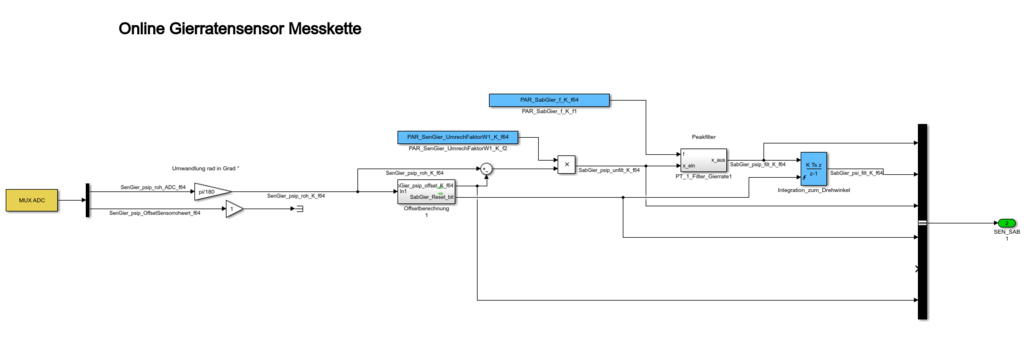
Abbildung 4: Messkette Gyro-Sensor im Online Simulink Modell als Auszug aus dem Gesamtmodell.

Vergleich I/O
| Online | Offline |
|---|---|
| SenGier_psip_OffsetSensorrohwert_f64 | EMS_psip_f64 |
| SenGier_psip_roh_ADC_f64 | ESM_psi_f64 |
| Online | Offline |
|---|---|
| SabGier_psip_offset_K_f64 | SabGier_psip_offset_K_f64 |
| SabGier_psip_unfilt_K_f64 | SabGier_psip_unfilt_K_f64 |
| SabGier_psi_filt_K_f64 | SabGier_psi_filt_K_f64 |
| SabGier_Reset_bit | SabGier_Reset_bit |
| SabGier_psip_filt_K_f64 | SabGier_psip_filt_K_f64 |
| SenGier_psi_KM_K_f64 |