|
|
| Zeile 6: |
Zeile 6: |
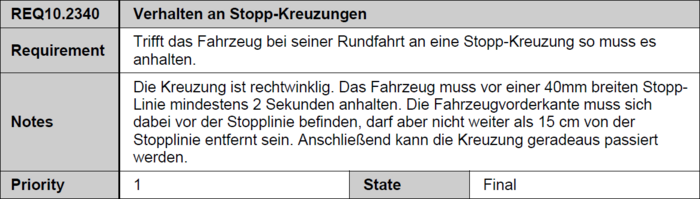
| Im Praktikum des Studienschwerpunkt Systems Designe Engineering im Studiengang Mechatronik, wird ein autonom fahrendes Modellauto entwickelt. Dieses Auto soll auf einem Rundkurs fahren, der unteranderem Kreuzungen mit Stopplinien beinhaltet. Das Auto soll automatisch an diesen Stopplinien halten. Für das Stoppen muss das Auto die Stopplinien über die eingebaute Kamera erkennen und den Abstand fortlaufend berechnen. Dies geht aus dem Lastenheft des Praktikums hervor (Vgl. Abb. 1). | | Im Praktikum des Studienschwerpunkt Systems Designe Engineering im Studiengang Mechatronik, wird ein autonom fahrendes Modellauto entwickelt. Dieses Auto soll auf einem Rundkurs fahren, der unteranderem Kreuzungen mit Stopplinien beinhaltet. Das Auto soll automatisch an diesen Stopplinien halten. Für das Stoppen muss das Auto die Stopplinien über die eingebaute Kamera erkennen und den Abstand fortlaufend berechnen. Dies geht aus dem Lastenheft des Praktikums hervor (Vgl. Abb. 1). |
|
| |
|
| Dieser Artikel ist aus der Kategorie [[:Kategorie:HowTo|"How-To"]].
| | == Lastenheft == |
| | <gallery mode = "traditional" widths=700px heights=200px> |
| | File:REQ10.2340_Verhalten_an_Stopp-Kreuzungen.PNG|Abbildung 1: REQ.10.2340 Verhalten an Stopp-Kreuzungen |
| | </gallery> |
|
| |
|
| == Inhalt ==
| |
| Die Gliederung des Inhalts hängt stark von Ihrem individuellen Projekt ab. Benutzen Sie einen leicht nachvollziehbaren roten Faden und gliedern Sie nach gesundem Menschenverstand!
| |
|
| |
|
| | == Pflichtenheft == |
|
| |
|
| | == Programmablaufplan == |
|
| |
|
| === Unterabschnitt === | | == Quelltext == |
| # Nutzen Sie Aufzählungen
| |
| #* mit verschiedenen Schachtelungen
| |
| #* und so weiter
| |
| # zweite Ebene
| |
| #* mit erneuter Unterebene
| |
|
| |
|
| === Bilder === | | == Test == |
| Bauen Sie Bilder ein, am besten mit darin gekennzeichneten Stellen, die Sie dann im Text erklären.
| |
| [[Datei:RetroGameStation_HSHL_Messe.jpg|rechts|mini|Beispielbild mit Quelle <ref> Eigenes Foto </ref>]]
| |
| | |
| ==== Bilder in den Text einbetten ====
| |
| Wenn Sie Bilder anzeigen möchten, ohne das der Artikel links oder rechts weiter läuft, können Sie den Textfluss mit dem Befehl <nowiki><br clear=all></nowiki> stoppen.
| |
| | |
| [[Datei:Sps steuerung cpu313c.jpg|left|mini|300px|Beispiel <nowiki><br clear=all></nowiki>]]
| |
| <br clear=all>
| |
| | |
| Alternativ können Sie das Bild in einer "wikitable" anzeigen lassen. Dadurch wird das Bild auch auf Bildschirmen mit einer anderen Auflösung in der richtigen Darstellungsart angezeigt.
| |
| {| class="wikitable"
| |
| | [[Datei:Sps steuerung cpu313c.jpg|left|mini|300px|Beispiel wikitable]]
| |
| |}
| |
| Hier geht es weiter mit dem Text.
| |
| | |
| === Tabellen ===
| |
| Eine tolle Tabelle ist hier dargestellt.
| |
| {| class="mw-datatable"
| |
| ! style="font-weight: bold;" | Spalte 1
| |
| ! style="font-weight: bold;" | Spalte 2
| |
| ! style="font-weight: bold;" | Spalte 3
| |
| |-
| |
| | blabla
| |
| | sowieso
| |
| | sowieso
| |
| |-
| |
| | test
| |
| | sowieso
| |
| | test1
| |
| |}
| |
| | |
| === Formeln ===
| |
| Für Formeln nutzen Sie die <nowiki><math></nowiki>-Umgebung.
| |
| | |
| Dieser Quelltext
| |
| | |
| <code type="latex">
| |
| <nowiki><math></nowiki> y = \int\limits_0^2 {\sin \frac{x}{2}dx}<nowiki></math></nowiki>
| |
| </code>
| |
| | |
| wird dann so dargestellt
| |
| <math>
| |
| y = \int\limits_0^2 {\sin \frac{x}{2}dx}
| |
| </math>.
| |
| | |
| Eine Übersicht über die Befehle findet sich z. B. hier: [https://latex-kurs.de/fragen/Gleichungen_Basic.html Gleichungen in math].
| |
| | |
| === Formatierung ===
| |
| Nutzen Sie zur Formatierung Beispiele, z. B. aus dem weltbekannten Wikipedia selbst (das ist die gleiche Syntax!) oder anderer Hilfeseiten wie z. B. <ref> [http://meta.wikimedia.org/wiki/Help:Editing/de Hilfeseite des Wikimedia-Projekts] </ref>.
| |
| | |
| === Quelltext ===
| |
| Details siehe: [[Quelltext_einbinden]].
| |
| | |
| | |
| Bei lang= muss die richtige Sprache eingetragen werden (matlab, c,...).
| |
| | |
| <source line lang="matlab" style="font-size:small">
| |
| for i=1:10
| |
| % try
| |
| % image = CAMERA_DumpFrame(s);
| |
| % catch err
| |
| % error('MATLAB:RWTHMindstormsNXT:Sensor:unknown', 'An unknown Error occured while fetching the image. Please check that the Camera is connected and try again');
| |
| % end
| |
| image = CAMERA_GetImage(com);
| |
| handle = imshow(image);
| |
| %pause(0.1)
| |
| currTime(i) = toc(startTime);
| |
| disp(['Aktuelle Zeit: ',num2str(currTime(i))])
| |
| %imwrite(image,sprintf('NXTCamImage%03d.png',i));
| |
| %imwrite(img,fullfile(workingDir,sprintf('HexBug%03d.png',n)));
| |
| % ca. alle 4.8 Sekunden ein Bild
| |
| end;
| |
| </source>
| |
|
| |
|
| == Zusammenfassung == | | == Zusammenfassung == |
| Was ist das Ergbnis?
| |
| Das Ergebnis dieses Artikels ist eine Vorlage, mit der Nutzer des Wikis schnell und leicht eigene Artikel verwirklichen können. Diese Vorlage ist Bestandteil der Anleitungen aus [http://193.175.248.171/wiki/index.php/Kategorie:HowTo den How-To's].
| |
|
| |
|
| |
|
| == Ausblick == | | == Ausblick == |
| Was kann/muss noch verbessert werden?
| |
|
| |
|
| |
|
| == Literaturverzeichnis == | | == Literaturverzeichnis == |
| <references /> | | <references /> |