Regelung des Radschlupfes eines Modellautos

Autoren: Mario Wollschläger, Lukas Honerlage
→ zurück zur Übersicht: WS2022: Angewandte Elektrotechnik (BSE)
Einleitung
Bei dem vorliegenden Artikel handelt es sich um ein Projekt aus dem Praktikum angewandte Elektrotechnik des Studiengangs Business and Systems Engineering (BSE). Ziel des Projektes ist es, den Radschlupf eines Modellautos zu regeln. Hierfür wird die Raddrehzahl über Sensoren erfasst. Die erfassten Daten speisen eine Regelungsalgorithmus, welcher auf einem Mikrocontroller ausgeführt wird. Basierend auf dem Ergebnis des Algorithmus wird in die Motoransteuerung eingegriffen, um den Regelkreis zu schließen.
Die Umsetzung des Projektes erfolgt nach dem V-Modell.
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1.0 | Das System muss den Radschlupf auf einen Maximalwert (in Prozent) begrenzen. Die Geschwindigkeit der angetriebenen Achse darf somit um maximal den gegebenen von der Fahrzeuggeschwindigkeit abweichen. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
| 1.1 | Für einen maximalen Radschlupf von 20% muss Anforderung 1.0 nach 2 Sekunden erfüllt sein. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
| 1.2 | Der Maximalwert muss mindestens in der Programmierung einstellbar sein. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
| 2.0 | Das System muss ohne externe Stromversorgung zu betreiben sein. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
| 3.0 | Ein Eingriff in den Motoransteuerung muss für den Nutzer angezeigt werden. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
| 4.0 | Das System muss vollständig im Fahrzeug verbaut werden. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
| 5.0 | Die Regelung muss auf einem Arduino Mikrocontroller ausgeführt werden. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
| 6.0 | Die Erschütterungen dürfen die Funktion des Systems nicht beeinträchtigen. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
| 7.0 | Das System muss ohne Nutzereingaben funktionstüchtig sein. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
| 8.0 | Die Reglung des Radschlupfs muss durch den Nutzer abschaltbar sein. | Mario Wollschläger | 27.09.2022 | Lukas Honerlage | 27.09.2022 |
Funktionaler Systementwurf / Technischer Systementwurf
Funktionaler Systementwurf
Im funktionalen Systementwurf wurde das System in mehrere Subkomponenten unterteilt, für welche eine Teilaufgabe definiert wurde. In Verbindung erfüllen diese Komponenten die Gesamtaufgabe der Regelung des Radschlupfs.
- Raddrehzahlsensor vorn: Diese Komponente misst die Drehzahl der Vorderachse. Auf diese Weise wird die Geschwindigkeit des Fahrzeuges ermittelt.
- Raddrehzahlsensor hinten: Diese Komponente misst die Drehzahl der Hinterachse. Auf diese Weise wird die Geschwindigkeit der angetriebenen Achse ermittelt.
- Arduino: Der Mikrocontrollern wertet die Sensordaten aus und führt den Regelungsalgorithmus aus. Mit dem Ergebnis wird die Motorsteuerung angesteuert.
- Motorsteuerung: Die Motorsteuerung steuert die Energiezufuhr des Motors und begrenzt somit dessen Leistung.
- Human Machine Interface (HMI): Gibt dem Nutzer Informationen über den Status des Systems. Ermöglicht das Abschalten der Regelung.
- Fahrzeug: Das Fahrzeug ist ein Modellauto. Es beinhaltet Antrieb, Fahrwerk und Energieversorgung.
-
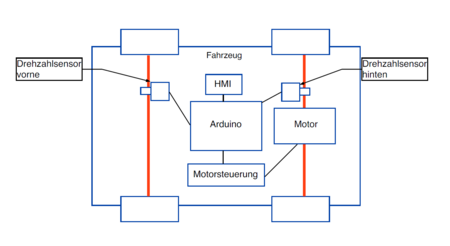
Funktionaler Systementwurf - Projektskizze
-
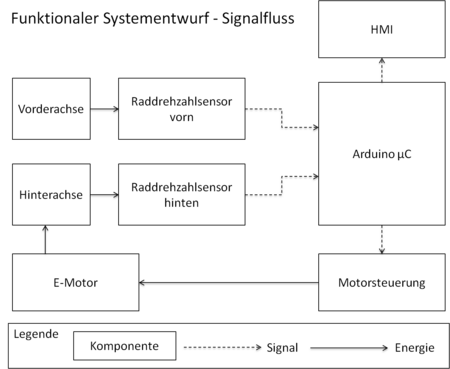
Funktionaler Systementwurf - Signalfluss


Technischer Systementwurf
Radrehzahlsensor vorne/hinten
Die Komponenten Radrehzahlsensor vorne und hinten sind identisch und besitzen folgende Eingänge:
| Eingänge | Beschreibung | Wert |
| VCC | Versorgungsspannung | 5 V |
| GND | Masse | 0 V |
Die Komponente besitzt folgende Ausgänge:
| Ausgänge | Beschreibung | Einheit |
| D0 | Digitaler Ausgang | - |
Arduino
Die Komponente besitzt folgende Eingänge:
| Eingänge | Beschreibung | Einheit |
| Digital Pin2 | Drehzahlsensor vorne | |
| Digital Pin3 | Drehzahlsensor hinten | |
| Digital Pin9 | Motorsteuerung | |
| Digital Pin12 | Human Machine Interface (HMI) Taster zu Ein- und Ausschaltung der Regelung |
Die Komponente besitzt folgende Ausgänge:
| Ausgänge | Beschreibung | Einheit |
| Digital Pin10 | Human Machine Interface (HMI) Signalleitung Anzeige, ob das System aktiv ist | |
| Digital Pin11 | Human Machine Interface (HMI) Signalleitung Anzeige, ob das System regelt |
Motorsteuerung
Die Komponente besitzt folgende Eingänge:
| Eingänge | Beschreibung | Wert |
| VCC | Versorgungsspannung | 5 V |
| GND | Masse | 0 V |
| DM0 | PWM - Eingang | 0 - 3,3 V |
| Auto_V | Zuleitung vom RC-Controller des Autos (Vorlauf) | - |
| Auto_R | Zuleitung vom RC-Controller des Autos (Rücklauf) | - |
Die Komponente besitzt folgende Ausgänge:
| Ausgänge | Beschreibung | Einheit |
| Motor_V | Zuleitung zum Motor (Vorlauf) | - |
| Motor_R | Zuleitung zum Motor (Rücklauf) | - |
Human Machine Interface (HMI)
Die Komponente besitzt folgende Eingänge:
| Eingänge | Beschreibung | Wert |
| VCC | Versorgungsspannung | 5 V |
| GND | Masse | 0 V |
| DH0 | System aktiv | 0 / 3,3 V |
| DH1 | System greift in die Motorsteuerung ein | 0 / 3,3 V |
Die Komponente besitzt folgende Ausgänge:
| Ausgänge | Beschreibung | Einheit |
| DH2 | Digitales Signal: System deaktivieren | - |
Fahrzeug
Komponentenspezifikation
Programmierung
Komponententest
Zusammenfassung
Literaturverzeichnis
→ zurück zur Übersicht: WS2022: Angewandte Elektrotechnik (BSE)