Projekt 49: Schwebende Kugel Nachbau: Unterschied zwischen den Versionen
| Zeile 127: | Zeile 127: | ||
Datei:Platinenlayout_Eagle_PCB.PNG|Layout der Platine | Datei:Platinenlayout_Eagle_PCB.PNG|Layout der Platine | ||
Datei:Schaltplan_Eagle_PCB.PNG|Schaltplan der Platine | Datei:Schaltplan_Eagle_PCB.PNG|Schaltplan der Platine | ||
Datei:Platine Schwebende Kugel 1| Platine zusammen mit Arudino Uno Board zur Datenaufnahme | Datei:Platine Schwebende Kugel 1.PNG| Platine zusammen mit Arudino Uno Board zur Datenaufnahme | ||
</gallery> | </gallery> | ||
Version vom 15. Januar 2018, 12:15 Uhr

Autoren: Benedikt Röper, Niklas Lingenauber und Christopher Brömse, Gesina Kira Tigger,
John Kneib, Benedikt Wulowitsch
Betreuer: Prof. Schneider, Prof. Göbel
Bei dieser Seite handelt es sich um die Dokumentation des Projektes "Schwebene Kugel Nachbau" aus dem Modul Angewandte Elektrotechnik im 5. Semester des Bachelorstudiengangs Mechatronik bzw. im 1. Semester des Masterstudiengangs Business and Systems Engineering. Das Projekt wurde zunächst von den Bachelorstudenten Benedikt Röper und Niklas Lingenauber bearbeitet und von Prof. Schneider betreut, dann von den Masterstudenten Christopher Brömse und Gesina Kira Tigger überarbeitet und fertiggestellt und von Prof. Göbel betreut.
Im Wintersemester 2017/2018 wurde eine neue Platine entwickelt, zudem wurde ein Konzept zur digitalen Regelung der Kugel in der Software MATLAB Simulink durch die Bachelorstudenten John Kneib und Benedikt Wulowitsch erarbeitet.
Aufgabe
Das Projekt beinhaltete die Aufgabe eine Magnetkugel mit Hilfe einer Spule und eines Hallsensors zum Schweben zu bringen. Die Anleitung für dieses Projekt konnte aus der Zeitschrift c't hacks 4/2014[1] entnommen werden.
Erwartungen an die Projektlösung
An das Projekt für die Bachelorstudenten wurden folgende Erwartungen gestellt:
- Lesen Sie den Artikel in c‘t hacks 4/2014
- Planen Sie den Aufbau
- Beschaffen Sie die Bauteile
- Realisierung des Aufbaus
- Machen Sie spektakuläre Videos, welche die Funktion visualisieren.
- Test und wiss. Dokumentation
- Live Vorführung während der Abschlusspräsentation
An das Projekt für die Masterstudenten wurden folgende Erwartungen gestellt:
- Lesen Sie den Artikel in c‘t hacks 4/2014
- Analysieren Sie den bisherigen Aufbau
- Beschaffen Sie eventuelle Ersatz-Bauteile
- Realisierung des Aufbaus
- Machen Sie ein spektakuläres Video, welches die Funktion visualisiert
- Test und wissenschaftliche Dokumentation
- Live Vorführung während der Abschlusspräsentation
Schwierigkeitsgrad
Anspruchsvoll (**)
Wirkungsprinzip
Es ist allgemein bekannt, dass sich im Magnetismus gleichnamige Pole abstoßen und sich unterschiedliche Pole anziehen. Die Schwierigkeit, eine Magnetkugel zum Schweben zu bringen, liegt darin, ein Gleichgewicht zwischen der durch den Magnetismus verursachten Anziehungskraft und der Erdanziehungskraft auf die Kugel zu erzeugen. Dazu wird ein dynamisches Magnetfeld benötigt, um eine Änderung des Magnetfeldes zu realisieren. Mit einer Spule lässt sich ein dynamisches Magnetfeld erzeugen und elektrisch steuern.
Regelkreis der Bachelorstudenten WS17/18
Nachdem die Hardware erfolgreich in Betrieb genommen werden konnte und die Signale der analogen Eingänge in MATLAB Simulink zur Verfügung standen, wurden Kennlinien aufgenommen. Zuerst wurde eine Kennlinie Abstand-Hallspannung aufgenommen. Hierbei wurde der Abstand variiert, parallel dazu wurde die Hallspannung eingelesen. Aus diesen Daten wurde in einem 1D-Lookup Table eine Kennlinie erzeugt. Die zweite Kennlinie bezieht sich auf den Dutycycle der Pulsweitenmodulation, mit der die Spule angesteuert wird und den dabei entstandenen Einfluss auf die Hallspannung. Dazu wurde an die Spule eine Spannung von 14.0V angelegt. Anschließend wurde der Dutycycle von 0-100% in Zehnerschritten erhöht. Die dabei zu messende Hallspannung wurde ebenfalls in einem 1D-Lookup Table, zusammen mit dem Dutycycle, als Kennlinie hinterlegt. Der schematische Aufbau des Regelkreises ist als Bild in der Galerie dargestellt.
- Galerie zum Regelkreis der Bachelorstudenten
-
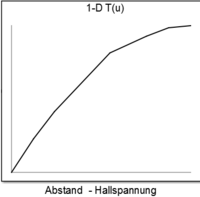
Kennlinie Abstand-Hallspannung
-
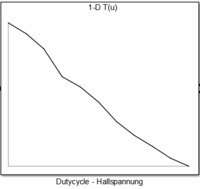
Kennlinie Dutycycle-Hallspannung
-
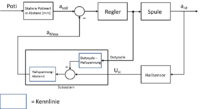
Schematischer Aufbau des Regelkreises



Bearbeitung des Projekts
Bachelorstudenten
Bei der Umsetzung im WS 2017/2018 wurde auf den bestehenden Aufbau zurückgegriffen. Dieser Aufbau beinhaltete das Stativ inkl. Potentiometer und Spule.
Die neu hinzugekommenen Bauteile sind folgende:
| Bauteil | Anzahl |
|---|---|
| Leistungs-MOSFET P-Ch TO-220AB 55V 74A | 2 |
| Spannungsregler, 5V, 1,5A, TO-220 | 2 |
| ATMega AVR-RISC-Controller, DIL-28 | 2 |
| Ultraschnelle Gleichrichterdiode, DO201, 400V,3A | 2 |
| Widerstand, Metalloxyd, 1,0 kOhm, axial, 0,5 W, 5% | 5 |
| Widerstand, Metallschicht, 3,0 kOhm, 0207, 0,6 W, 0,1% | 5 |
| Widerstand, Metallschicht, 1,0 kOhm, 0207, 0,6 W, 0,1% | 2 |
| Elko radial, 120 uF, 16 V, 105°C, low ESR | 4 |
| Keramik-Kondensator, 500V, 22P | 4 |
| Standardquarz, Grundton, 16,000000 MHz | 3 |
| Hallsensor, linear, analog, TO-92 | 3 |
| IC-Sockel, 28-polig, doppelter Federkontakt | 2 |
| IC-Sockel, 8-polig, doppelter Federkontakt | 2 |
| Lötbare Schraubklemme - 8-pol, RM 5 mm, 90° | 2 |
| Widerstand Keramik, 1,0 Ohm | 2 |
| Leiterplatte mit eigenem Layout | 1 |
Bauteiletabelle der Bachelorstudenten
Umsetzung
Während der Wartezeit auf die bestellten Bauteile, wurde von den Bachelorstudenten eine Leiterplatte designt, die zum Unterbringen der bestellten elektronischen Bauteile diente. Das Leiterplattenlayout wurde mit der Software Eagle erstellt. Gefertigt wurde die Leiterplatte mit dem eigenen Fräsbohrplotter der Hochschule.
Nachdem die Bauteile eingetroffen waren, wurden diese auf die Leiterplatte anhand des erstellten Schaltplanes aufgelötet. Als Netzteil zur Spannungsversorgung der Leiterplatte wird ein Labornetzteil verwendet. An die Leiterplatte wird die Spannungsversorgung, die Spule, der Hallsensor und das Potentiometer über eine lötbare Schraubklemmleiste angeschlossen. Dies hat den Vorteil, dass die Platine von den angeschlossenen Komponenten problemlos getrennt werden kann.
- Galerie zur Umsetzung der Bachelorstudenten WS17/18
-
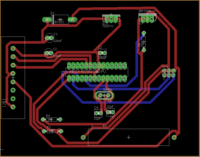
Layout der Platine
-
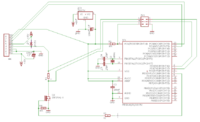
Schaltplan der Platine
-
Platine zusammen mit Arudino Uno Board zur Datenaufnahme


{kind=link}
Ergebnis und Ausblick
Bachelorstudenten
Nach Fertigstellung des Versuchaufbaus wirkte keine Anziehungskraft auf die magnetisierte Kugel, sodass ein Schweben nicht möglich ist. Da bei vorherigen Testaufbauten jedoch bereits eine Anziehungskraft aufgetreten war und bereits eine Umpolung des Feldes vorgenommen wurde, wurden zunächst von Lötfehlern auf der Plantine als Ursache angenommen. Nach der Beseitigung Unreinheiten auf der Platine, war die gewünschte Funktion weiterhin nicht sichergestellt. Bei der Ursachenunteruschung fiel auf, dass zum Einen der Spannungsregler sehr heiß läuft, zum Anderen die Spule selbst beim Anlegen der maximalen Spannung kein Magnetfeld aufbaut, dass die Kugel im Gleichgewicht halten kann. Dies lässt darauf schließen, dass die Spule bei den ersten Ansteuerungsversuchen überlastet wurde, den Kupferlack zum Schmelzen brachte und somit Kurzschlüsse innerhalb der Spule hervor ruft. Ein Kabelbruch konnte ausgeschlossen werden, da beim Anlegen der Spannung ein Strom fließt, der messbar ist. Die Ursache der hohen Temperatur des Spannungsreglers könnte möglicherweise in einem Defekt des Spannungsregler liegen, der durch die zuvor angesprochenen Lötfehler zerstört worden sein könnte.
Masterstudenten
Das Projekt konnte erfolgreich umgesetzt werden. Die Kugel schwebt in einem stabilen Zustand mit etwa 30 mm Abstand zum Hallsensor und der Spule.
Dies ist auch in dem spektakulären Video zu sehen. Hierzu entweder den QR-Code in der Gallerie zur Umsetzung der Masterstudenten scannen oder auf den folgenden Link klicken: Angewandte Elektrotechnik - Projekt 49: Schwebende Kugel Nachbau
Um die Kugel auch nach größeren Störungen stabil zu halten, ist es möglich das Projekt mit einem Microcontroller, wie beispielsweise dem Arduino Uno, zu realisieren. Hier könnte ein PID-Regler zum Einsatz kommen.
Realisierung mit einem Mikrocontroller
Als Mikrocontroller für die Regelung der Kugel wurde ein Atmel326b verwendet. Über das Entwicklungsboard Arduino Uno lässt sich eine Verbindung zu der Leiterplatte herstellen. Mithilfe des Arduino Uno Boards lässt sich der Mikrocontroller direkt auf der Leiterplatte programmieren, ohne ihn immer entnehmen zu müssen. Zudem ist es möglich, die Analogeneingänge des Mikrocontrollers auf der Leiterplatte über das Arduino Board einzulesen und der Software MATLAB Simulink für die Regelung zu benutzen.
Literaturverweise
[1] Schmerold, U. (04/2014). Schwebeteilchen. c’t Hacks, 18ff.
→ zurück zum Hauptartikel: Fachpraktikum Elektrotechnik (WS 15/16)
→ zurück zum Hauptartikel: Angewandte Elektrotechnik (WS 16/17)