Projekt 18b: Sonnen-Nachführung
Autoren: Agic, Barranco
Betreuer: Daniel Klein
→ zurück zur Übersicht: WS 18/19: Fachpraktikum Elektrotechnik (MTR)
Aufgabe
Entwickeln und Bauen Sie Sonnenlicht-Nachführ-Gerät für eine Solarzelle.
Erwartungen an die Projektlösung
- Recherche bisheriger Lösungen
- Entwurf der Schaltung und Beschaffung der Bauteile
- Darstellung der regelungstechnischen Theorie
- Beschaffung der Bauteile (Miniaturisierung z.B. Arduino Nano)
- Systemidentifikation (Übertragungsfunktion der Regelstrecke bestimmen)
- Realisierung der Schaltung durch Fertigung eines prototypischen Arduino-Uno-Shields
- Vergleichen und bewerten Sie verschiedene Regleransätze (P, PI, PID und andere).
- Modellbasierte Programmierung der Hardware via Simulink
- Machen Sie ein tolles Videos, welches die Funktion visualisiert.
- Test und wiss. Dokumentation
- Live Vorführung während der Abschlusspräsentation
Hinweis: Grenzen Sie sich zu Vorgängerlösungen ab.
Einleitung
Im Rahmen des GET-Fachpraktikums im 5.Semester an der HSHL Lippstadt, betreut durch Prof. Schneider und Daniel Klein wurde das Projekt der Plannung und des Baus einer "Sonnennachführung" vergeben. Dabei soll durch die Nutzung eines Arduino UNO Boards und entsprechender Aktoren, Sensoren und Software eine Plattform geschaffen werden, die aktiv einer Lichtquelle folgen kann. Dazu ist die Konstruktion einer Plattform notwendig, die entsprechend horizontale als auch vertikale Freiheitsgerade besitzt. Vorbild in der Realität sind hierbei reale "Suntracker" Systeme, die durch aktive Ausrichtung der Panels zur Sonne (bzw. dem günstigsten Punkt) eine beträchtliche Erhöhung der Energieausbeute erreichen können. Für die teilnehmenden Studenten ergibt sich so die Möglichkeit in den Kerngebieten der Mechatronik wie Mechanik, Elektronik und Informatik, spielerisch praktische Fähigkeiten zu erlernen und anzuwenden.
Projekt
Projektplan
Verwendete Bauteile
- 2 Servomotoren (Reely Mini-Servo Stecksystem: JR)
- 4 Fotowiderstände (LDR 07)
- 4 10k Ohm Widerstände
- 1 Arduinoboard Uno R3
- 1 Steckplatine
- 3D Drucker zum drucken der Gehäusebauteile
Verwendete Software
- MATLAB/Simulink 2018b
- Arduino Software IDE 1.8.1
- Fritzing
Lasten und Pflichtenheft
| Lasten | Pflichten |
|---|---|
| 1. Entwurf passender Gehäuse für Servomotoren und zur Unterbringung der Fotosensoren. Einarbeitung in die dafür notwendigen Aktoren und Sensoren und deren Schaltung. | Betrachtung bereits existierender Lösungen und Anpassung dieser an eigene Pläne. |
| 2. Erstellung des Schaltplans mit Fritzing und erste Tests in real der Servos und Sensoren mit Hilfe von Breadboard und MatlabSimulink | Konfigurationsaufbau und Analyse des Aufbaus per Simulinkschaltung. Organisation der benötigten Simulinkbibliotheken für das Arduino. |
| 3. Entwurf und Bau eines zweiten, alternativen Gehäusetyps als Ersatz zum 3D-Druck Gehäuse | Redundanter Ansatz um verschiedene Konfigurationen von Hard- und Software zu testen. |
| 4. Einarbeitung und Erstellung der benötigten Softwaregrundlagen mit Hilfe der Arduino IDE Software | Test verschiedener Gehäusekonfigurationen mit der genuinen Arduino IDE, um auf die angepassten Bibliotheken und Befehlssätze dieser zugreifen zu können, was einen leichteren und direkteren Zugang zum System ermöglicht und sich als zuverlässiger erweist. |
| 5. Fertigstellung und Test des ersten voll lauffähigen Prototyps in Hard- und Software. | Wichtiger Meilenstein erreicht. Grundanforderung an Projekt erfüllt so dass sich auf Feinjustierung des Systems konzentriert werden kann. |
| 6. Erstellung der Dokumentation und des Wikiartikels des Projekts | Dokumention des Projekts nach HSHL Standards zur Transparenz des Projekts für dritte. |
| 7. Vorbereitung auf die Präsentation im Rahmen der Abschlussveranstaltung | Erfüllung aller geforderten Standards im Rahmen des Praktikums. |
- Bildergalerie
-
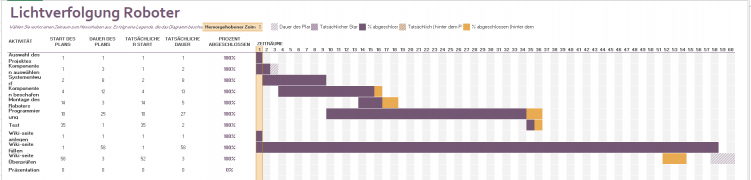
Projektplan
-
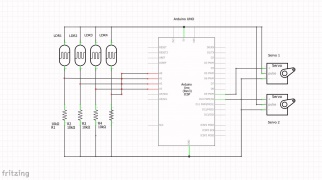
Schaltplan
-
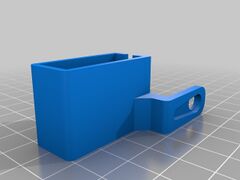
3D Modell Ausleger
-

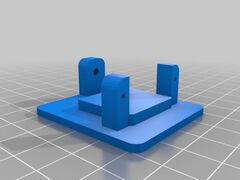
3D Modell Plattform
-
3D Modell Stativ
-
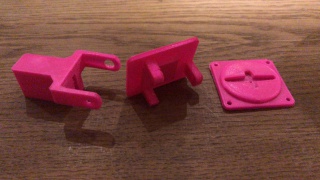
3D Druck der 3 Teile
-

Alternatives Gehäuse aus Holz
-

Eingesetzter Fotoresistor
-
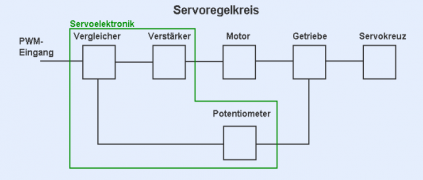
Regelkreis der Servomotoren
-

Aufbau eines Arduino Servomotors
-
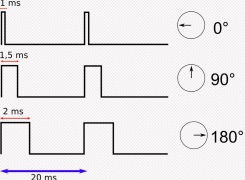
Funktionsweise PWM am Servo











Projektdurchführung
Theoretische Grundlagen und praktische Anwendung
Die grundlegende Theorie hinter dem Projekt ist relativ einfach. Auf dem Auflegerarm werden die 4 Fotowiderstände jeweils zu zwei Paaren oben-unten, links-rechts montiert und an die A0 bis A3 Analogeingänge angeschlossen. Zur Spannungsversorgung dient der 5V Ausgang des Arduino. Diese werden jeweils über 10K Ohm Widerstände an die Fotosensoren angelegt. Die Fotowiderstände verringern bei steigender Lichtintensität ihren inneren Widerstand, so dass eine höherer Spannung gemessen werden kann an den Analogeingängen. Somit kann das Arduino mit jeweils zwei Widerständen für oben und unten und links und rechts und deren Spannungsunterschied, per passenden Softwarebefehlen und if-Anweisungen diese Werte vergleichen und Steuersignale an die Servos geben zur Nachverfolgung der Lichtquelle.
Die Servos werden ebenfalls über die 5V versorgung des Arduino mit Spannung versorgt. Die Steuerungssignale erfolgen hierbei über Pin 9 und 10, die die Ausgabe eines PWM Signals ermöglichen. Hierbei ist auch auf die Verkabelung der Servos zu achten, da in unserem Fall die Ansteuerung nur über das Signalkabel des Servos erfolgen kann. Dabei sorgt ein Servo für die horizontale Drehung im Bereich von 180° und der zweite für die vertikle Rotation, wobei hierbei darauf geachtet werden muss die Rotation nach unten zu beschränken. Die Abbildungen aus der Bildergalerie verdeutlichen dies nochmal.
In unserer ersten Konstruktion des Gehäuses zeigte sich leider dass die 3D Druck Modelle nicht optimal geeignet waren für den Einsatz, da die Servomotoren ständig aus ihren Lagerungen sprangen und so ein zuverlässiger Betrieb nicht möglich war.
TO DO: Matlab Einbindung und Code Erklärung
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 18/19: Fachpraktikum Elektrotechnik (MTR)