Datei:Posture crouch.png
Es ist keine höhere Auflösung vorhanden.
Posture_crouch.png (181 × 214 Pixel, Dateigröße: 41 KB, MIME-Typ: image/png)
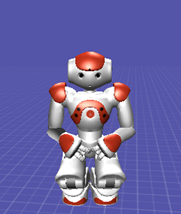
4. Crouch • Hocke • Beine komplett angewinkelt • Arme locker
Choregraphe Crouch kann dauerhaft gehalten werden und verbraucht wenig Energie. Es eignet sich als Position vor dem Hochfahren und zum Herunterfahren des NAO Man kann den NAO mit dem „GoTo Positure“-Befehl in diese Position Bringen
Dateiversionen
Klicke auf einen Zeitpunkt, um diese Version zu laden.
| Version vom | Vorschaubild | Maße | Benutzer | Kommentar | |
|---|---|---|---|---|---|
| aktuell | 09:00, 9. Mär. 2016 | | 181 × 214 (41 KB) | Simon Hanemann (Diskussion | Beiträge) | 4. Crouch • Hocke • Beine komplett angewinkelt • Arme locker Choregraphe Crouch kann dauerhaft gehalten werden und verbraucht wenig Energie. Es eignet sich als Position vor dem Hochfahren und zum Herunterfahren des NAO Man kann den NAO mit dem … |
Du kannst diese Datei nicht überschreiben.
Dateiverwendung
Die folgende Seite verwendet diese Datei:
{kind=link}