Regelung des Radschlupfes eines Modellautos

Autoren: Mario Wollschläger, Lukas Honerlage
Einleitung
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Das Fahrzeugmodell muss die Kinematik des als starr angenommenen Fahrzeugkörpers beschreiben. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 2 | Das Fahrverhalten muss unter der Annahme korrekt abgebildet werden, dass die Räder schlupffrei abrollen. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 3 | Am Eingang werden die Längsgeschwindigkeiten entlang der x-Achse des Fahrzeugkoordinatensystems K der Räder rechts (R) und links (L) vorgegeben. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 4 | Am Ausgang müssen
zur Verfügung stehen. |
Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 5 | Das Modell muss in Matlab/Simulink erstellt werden. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 6 | Die Rechnung des Modells erfolgt mit diskreten Zeitschritten (es sind diskrete Integratoren zu verwenden). | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 7 | Die Dokumentation muss auf Basis der Mehrkörpersystemeberechnung leicht nachvollziehbar erfolgen. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 8 | Bei der Simulation muss eine graphische Ausgabe der Position und Richtung des Fahrzeugs in x- und y-Koordinaten des I-Systems erfolgen. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 9 | Die Signalnamen müssen gemäß nebenstehender Abbildung gewählt werden. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
Funktionaler Systementwurf / Technischer Systementwurf
Komponentenspezifikation
Programmierung
Die Programmierung ist nun auf Basis der oben ermittelten Gleichungen möglich und erfolgt in Matlab/Simulink.
Simulink
Komponententest
Da es sich bei dieser Entwicklung um die einer einzelnen Komponente handelt, schließt der Komponententest mit dem Testbericht die Entwicklung ab (vgl. Tabelle 2).
| ID | Testfallbeschreibung | Eingang | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|---|
| 1 | Das Fahrzeugmodell steht. | 0 | 0 | Alle Ausgänge sind Null. | OK | Prof. Göbel | 10.06.2017 |
| 2 | Das Fahrzeugmodell fährt eine Rechtskurve. | 1 | 0 | Rechtskurve: Negative Gierrate, negativer Gierwinkel. | OK | Prof. Göbel | 10.06.2017 |
| 3 | Das Fahrzeugmodell fährt eine Linkskurve. | 0 | 1 | Linkskurve: Positive Gierrate, positiver Gierwinkel. | OK | Prof. Göbel | 10.06.2017 |
| 4 | Das Fahrzeugmodell fährt geradeaus. | 1 | 1 | Keine Gierrate und Gierwinkel, . | OK | Prof. Göbel | 10.06.2017 |
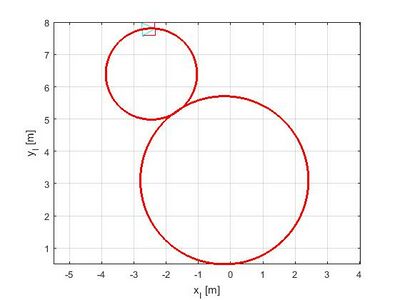
Als Abschluss dieses Artikels zeigt Abb. 6 eine Ergebnisdarstellung der Fahrzeugbewegung in I-Koordinaten (Draufsicht).
Zusammenfassung
Das Modell ist fertig und funktioniert wie gewünscht! Somit ist die Entwicklung von Algorithmen möglich, ohne ein Fahrzeug in Hardware zur Verfügung zu haben. Dadurch eröffnen sich ernorme Möglichkeiten wie z. B. simultanes Entwickeln, automatisiertes Testen, simulative Auslegung von Reglern u. s. w.!
Literaturverzeichnis
→ zurück zum Hauptartikel: