Universal Robots
Universal Robots (UR) an der HSHL
UR3, CB-Serie

Der Roboter ist ein UR3 von Universal Robots. Er verfügt über sechs rotierende Gelenke welche sechs Freiheitsgrade ermöglichen. Seine maximale Reichweite beträgt 500mm. Programmiert werden kann er entweder über das angeschlossene Terminal in der mitgelieferten Polyscope Software oder über einen angeschlossenen Computer in einer kompatiblen Entwicklungsumgebung. Zur weiteren Ansteuerung besitzt er sowohl 16 digitale als auch zwei analoge Ein- und Ausgänge. Außerdem ist ein RG2 Greifer der Firma OnRobot montiert. Bei diesem handelt es sich um einen elektrischen zwei Finger Greifer mit einer maximalen Greifkraft von 40 Newton.
Technische Daten zu dem Roboter können auf der Internetseite von Universal Robots angefordert werden.
Das Datenblatt des UR3-Roboters kann hier entnommen werden: Datei:Technische-Daten-UR-3.pdf.
UR10, CB-Serie

Ansteuerung der UR-Roboter
Matlab
Dieser Artikel zeigt, wie über Matlab mit Hilfe der Robotics Toolbox ein UR-Roboter angesteuert werden kann.
- Senden von URScript Befehlen über Realtime- und RTDE-Schnittstelle
Um mit dem Roboter über eine Ethernet-Verbindung kommunizieren zu können, muss ein TCP Port geöffnet werden.
- Die Ports für die Kommunikation zum Roboter sind 30003 (Realtimeschnittstelle) und 30004 (RTDE-Schnittstelle)[1] [2]
- Die IP-Adresse des Roboters muss gegebenenfalls auf statisch festgelegt werden anstatt DHCP.
Für das Erzeugen einer Bewegung gibt es im Skripthandbuch von UR bestimmte Befehle. So ist eine Bewegung aller Achsen des Roboters auf bestimmte Zielwinkel „q“ mit der Funktion „movej(q, a, v, t=0, r=0)“ möglich. Die zu übergebenden Variablen sind hier ebenfalls beschrieben.
- q = Gelenkwinkel der einzelnen Achsen (Jeder Achse wird ein Winkel in Radiant zugeordnet. Jede Achse dreht sich beim Anfahren des neuen Bewegungsbefehls somit auf seinen vorgegebenen Wert. Bei dem UR3 gibt es 6 Achsen, somit auch 6 unterschiedliche q (q1, q2, q3, q4, q5, q6).)
- a = Beschleunigung der Achsen
- v = maximale Geschwindigkeit der Achsen
Dieser Befehl muss als String, also nicht als Variablen, an die Steuerung des Roboters übergeben werden. Dies kann in MATLAB mit „num2str“ so umgesetzt werden:
function [commandString] = command2string(q,a,v,t,r)
commandString = ['movej([' num2str(q(1)) ', ' num2str(q(2)) ', ' num2str(q(3)) ', ' num2str(q(4))...
', ' num2str(q(5)) ', ' num2str(q(6)) '], ' num2str(a) ', ' num2str(v) ', ' num2str(t)...
', ' num2str(r) ')'];
end
Hier kann die originale MATLAB-Funktion heruntergeladen werden: Datei:Command2string.m. Diese muss sich am Ende des Hauptprogramms oder mit demselben Namen im gleichen Pfad befinden.
Anschließend muss dieser String über die Verbindung mit „fprintf“ gesendet werden.
Socket_conn = tcpip(Robot_IP,Port_NR); fprintf(Socket_conn; command2string(q,a,v,t,r));
- Austauschen von Daten über Server-Client Verbindung
ROS
In diesem Artikel ist die Inbetriebnahme der beiden UR-10 Arme mit Hilfe von ROS beschrieben.
Simulation der UR-Roboter mittels "Offline-Simulation"
Die Software, die auf den Rechnern des Roboters läuft (auf dem Handbediengerät) kann auf jedem beliebigen PC als so genannte "virtuelle Maschine" installiert werden.
Installation
Eine auführliche Anleitung erhalten Sie, wenn Sie im Download-Bereich der UR-Internetseite auswählen:
- CB-Series
- Software
- Offline Simulator
- Betriebssystem auswählen, wo die Roboter-Offline-Software laufen soll. Im häufigsten Fall liegt auf Ihrem PC ein Windows-Betriebssystem vor. Installieren Sie sich in diesem Fall die Software VirtualBox und folgenden der Anleitung von UR!
Diese Art der Offline-Simulation der UR-Roboter wird selbst vom Support von UR verwendet, um alle Roboter in allen Software-Versionen testen und Fragen dazu beantworten zu können!
Einrichtung der Netzwerkverbindung von Host-Rechner und virtuellem PC
Der Rechner, auf dem die virtuelle Maschine installiert ist, nennt sich "host". Um von diesem "host" aus eine Netzwerkverbindung zum virtuellen Rechner herstellen zu können, wurde dieses Vorgehen erfolgreich getestest:
- Einrichtung einer Netzwerkverbindung in den Einstellungen von VirtualBox:
- Netzwerkadresse einstellen.

Netzwerkadresse einstellen - DHCP-Server einstellen.

DHCP-Server einstellen
- Netzwerkadresse einstellen.
- In den Einstellungen für die virtuelle Maschine muss noch der richtige Netzwerkadapter und der richtige Modus eingestellt werden:
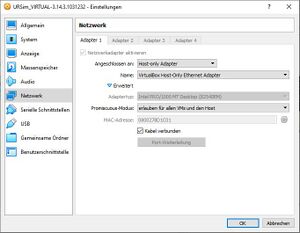
Netzwerkadapter und Modus einstellen



Getestet wird das Ganze, in dem auf dem "host" in einem Kommandofenster (Suchen nach "cmd") der Befehl "ping 10.0.2.15" ausgeführt wird.