Praxissemester Projektteam WS2021

Betreuer:
Prof. Dr.-Ing. M. Göbel; Prof. Dr.-Ing. U. Schneider; B.Eng. G. Wurth
Teilnehmer:
Arfat Kamal; Fawad Murad; Sefa Hasan Demiröz; Jonas Gerken; Armel Talovic
Robot Operating System
Das Roboter Operating System 2 gibt Entwicklern die Möglichkeit Roboteranwendungen zu erstellen, indem es Bibliotheken und Werkzeuge anbietet , die bei der Softwareenwticklung benötigt werden. Durch das Roboter Operating System können Entwickler Codes wiederverwenden, die bisher zur Verfügüng gestellt worden sind. Folgendes Tutorial hilft bei der Einarbeitung von dem Roboter Operting System 2 [1]
Ubuntu
Auf den Laborrechnern im Regelungstechniklabor ist neben Windows 10 zusätzlich Ubuntu 20.04 installiert. Die Computer starten automatisch das Windows Betriebssystem. Zum Starten von Ubuntu muss zu Beginn des Boot-Prozesses die F12 Taste gedrückt werden. Dadurch wird das Startmenü geöffnet. In dem Startmenü kann mit den Pfeiltasten eine Startoption ausgewählt werden. Im bereich Legacy Boot stehen zwei Festplatten zur Verfügung. Auf der 240GB SSD ist das Windows Betriebssystem installiert und auf der 1000GB HDD befindet sich eine Partition mit Ubuntu. Nach auswahl der HDD mit Enter bestätigen und das Ubuntu Betriebssystem wird geladen. Das Passwort unter Ubuntu ist bei allen Laborrechnern Hshl2021
Ubuntu Server und Raspberry Pi3
Für die Installation von Ubuntu Server 20.04.3 LTS auf einem Raspberry Pi3 Bitte diese Anleitung verwenden.
Installation von ROS 2 auf dem Raspberry Pi3
Für die Installation von ROS 2 Foxy auf einem Raspberry Pi3 Bitte diese Anleitung verwenden. Bitte darauf achten, dass auf dem Raspberry Pi3 nur begrenzte Resourcen zur Verfügung stehen. Daher wird hier nicht die "Desktop Install", sondern die "ROS-Base Install (Bare Bones)" verwendet.
Webots
Webots ist ein Simulationsprogramm, welches von uns genutzt wird, um unsere programmierten Codes zu veranschaulichen und gegebenenfalls zu verbessern oder zu korrigieren. In Webots hat man eine große Anzahl von Sensoren, Motoren oder generell Gegenständen mit denen man die Simulation aufbauen kann. Folgendes Tutorial dient zur Einarbeitung [2].
Installation von dem Roboter Operating System 2
Roboter Operating System 2 Tutorials
Webots Tutorials
3-D Model in Solidworks
Model Simulation in Webots
Alphabot , Raspberry Pi / Arduino und andere Komponenten
Microcontroller coding mit der Integration von Ros 2
Autor: Jonas Gerken
Um den Microcontroller anzusteuern wurde er zuerst mit SSH verbunden. Dann wurde er
Raspberry Pi mit SSH(Secure Shell) verbinden
SSH wird verwendet, um den Raspberry Pi ohne eine HDMI-Verbindung zu nutzen zukönnen. Secure Shell oder SSH bezeichnet ein kryptographisches Netzwerkprotokoll für den sicheren Betrieb von Netzwerkdiensten über ungesicherte Netzwerke. Häufig wird es verwendet, um lokal eine entfernte Kommandozeile verfügbar zu machen, d. h., auf einer lokalen Konsole werden die Ausgaben der entfernten Konsole ausgegeben, und die lokalen Tastatureingaben werden an den entfernten Rechner gesendet.
So kann später in diesem Fall der Roboter über eine Ethernet oder Wifi-Verbindung gesteuert werden.
Um SSH zu aktivieren muss auf der SD-Karte im boot-Verzeichnis eine lehre Text-Datei mit dem Namen "ssh" erstellt werden. (abb. 1) Um die Dateiendung .txt zu entfernen muss im Windows-Explorer unter dem Reiter Ansicht ein Haken bei Dateinamenerweiterungen gesetz werden. So wird die Dateiendung bei einer Umbennung angezeigt und es kann die .txt Endung entfernt werden.
Für die SSH-Verbindung wird die IP-Adresse des Raspberry Pi's benötigt. Dafür muss er mit einem HDMI Kabel an einen Bildschirm angeschlossen werden. Nach der Anmeldung auf dem Raspberry Pi, kann die IP-Adresse abgelesen werden. Abb. 2)
- Raspberry Pi mit HDMI-Kabel an einen Bildschirm anschließen(Abb. 2 )
- mit den Anmelde-Daten anmelden
- hier ist nun die IP-Adresse des Raspberry Pi's zusehen, welche für die Verbindung mit einem Zweiten Gerät benötigt wird.
- Ethernet-Verbindung erfolgt über einen Switch, da der Pc und der Rpi sich im gleichen Netzwerk befinden muss. Hierzu sind keine Konfigurationen nötig.
- um eine Wifi Verbindung herzustellen ist erst eine Konfiguration nötig
- Wifi Verbindung herstellen
- um zur Netzwerkkonfiguration zu kommen wird dieser Befehl in einem Terminal ausgeführt "sudo nano /etc/netplan/50-cloud-init.yaml"
- Der Datei Inhalt ist in Abb. 4 abgebildet.
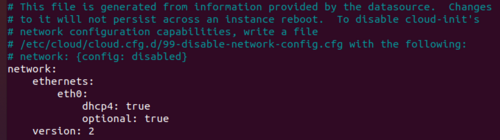
Abb 4: Beispiel Ethernet-Konfiguration
- Hier werden dann die benötigte Wifi-Konfiguration hinzugefügt.

ROS2 Python Code
Testing
Projekt Hanning
Installation von Ros 2 auf den Raspberry Pi