Turtle Bot WS 20/21
Anforderungen an die Roboterhardware
- Low Cost (max. 60€)
- Bestellbar im September
- Arduino Hardware
- Turtle Bot 2WD Basis (2 Antriebsräder + 1 Stützkugel)
- Bluetooth Modul als Diagnoseschnittstelle
- Akkubetrieb
- Sensorik
- Abstandsssensorik (Ultraschall oder IR)
- Radencoder (vorwärts und rückwärts)
- Kompass
- Gierrate
- Optional: Beschleunigungsssensoren (z.B. MPU-9250)
- Line-Tracking Sensor
Anforderungen an die Robotersoftware
- Programmierbar in C und
- programmierbar in MATLAB.
Nächste Aufgaben/Meilensteine
- Projektplanung bis Semesterbeginn (bitte Meilensteine terminieren)
- Beschaffung zweier Prototypen (Bestellt, angekommen 24.08.20)
- Aufbau eines Prototypen (etwa 1h-2h)
- MS1: Ergebnisdokumentation:
- Vollständige Materialliste zur Nachbestellung (Kostenvoranschlag für Roboter 60 Stück liegt vor, für die Batterien muss entscheidunggetroffen werden welche reichen, genauso Ladegeräte)
- Werkzeugliste (z.B. Schraubendreher Kreuz (PH0 + PH1) + Kombizange )
- Vollständiger Bauplan für Studierende
- Einführungsvideo: Montagevideo(Online-Video ist verlinkt Foto serie geschossen vom Zusammenbau (A:\Sciebo Mechatronik-Labore\Organisation\Labor_Robotik\Arduino Roboter\AlphaBot Zusammenbau Bilder) muss noch hochgeladen werden )
- Inbetriebnahme mit Visual C
- Auslesen der Sensoren
- Ansteuerung der Aktoren
- MS2: Ergebnisdokumentation:
- Rahmenprogramm für die Studierenden (Hier kann man sich an der Toolbox der RWTH Aachen orientieren.)
- Beispiel 1: LeseAbstandsssensorik
- Beispiel 2: FahreEinQuadrat (mit LeseRadEncoder)
- Beispiel 3: LeseKompass
- Beispiel 4: LeseGierrate
- Beispiel 5: LeseLineTrackingSensor
- Beispiel 6: LeseBeschleunigungssensor
- Einführungsvideo: Installation der Software
- Einführungsvideo: Erste Schritte mit Visual C
- Einführungsvideo: Ausführung eines der Beispiele
- Beschaffung der Roboter & Senoren
- Beschaffung von Transportkisten
- Planung eines unkomplizierten "Pfandsystems" z.B. über Paypal?!
- Vorbereitung der Verleihkisten (inkl. Leihschein)
- Ausgabe der Kästen
- MS3: Ergebnisdokumentation:
- Leihscheine gegen Pfand
- Jede Gruppe/jeder Student hat ein Fahrzeug
Vorlesungsbeginn ist die finale Deadline: 12.10.2020
Hardware
AlphaBot robot building kit for Arduino
[1] 80€ Teuer aber hat alles was benötigt wird
er hat zusätzlich ein Zusatz Boards mit folgenden Funktionen:
Joystick (5 directions) Adjustable potentiometer Buzzer RGB LED Temperature sensor High precision RTC 0.96inch OLED XBee interface
es fehlt
- Akku 2* 18650 es dürfen nur 18650 Zellen ohne eingebaute Schutzschaltung verwendet werden, da nur diese in den AplhaBot passen.
Das Board besitzt eine automatische Unterspannungsabschaltung, es wird empfohlen Li-Ion Akkus mit 3,7V Nennspannung zu wählen, also keine LiFePo4.
- Ladegerät:
Einfache Li/LiFepo Lader 2 Zellen 19€
oder
Nitecore NEW i2 12V DC/230V AC Speisung
Minimal Lader 2 Zellen 8,95€
Zusammenbau
- Überprüfen sie Ihr Set auf Vollständigkeit
- Laden sie die Li- Ionnen Akkus, beachten sie die allgemeingültigen Vorsichtsmaßnahmen beim Laden von Akkus (nicht unbewacht laden, Temperatur überwachen, Akku nicht Tiefentladen, Akkus nicht entladen zur Seite packen sondern abkühlen lassen nach benutzung und dann wieder laden, bei längerer nicht benutzung Akkus mit 70% Ladung zur Seite legen, nicht in die Sonne legen, ...).
- Bitte entladen sie sich in dem sie z.B. ein blankes Heitzungsrohr anfassen, sonst können sie die Ic's auf den Platinen beschädigen.
- Bitte folgen sie nicht der Bauanleitung im Video sie soll ihnen nur einen überbick verschaffen es sind dort Fehler vorhanden.
- Bitte überprüfen sie alle Steckverbinder auf sauberen Sitz
Schrittweise bebilderte Bauanleitung
- ziehen sie alle Folien von den Bauteilen ab.
-
 Abb1: MontagePlatte
Abb1: MontagePlatte -
 Abb2: MontagePlatte
Abb2: MontagePlatte -
 Abb3: Motor
Abb3: Motor -
 Abb4: Motor
Abb4: Motor -
 Abb5: Motorhalte
Abb5: Motorhalte -
 Abb6: Motorhalte
Abb6: Motorhalte





- Schrauben
Es gibt verschiedene Schrauben.
- Die schwarzen Kunststoffschrauben dürfen nur mt Kunststoffmuttern verwendet werden.
- Sie sind sehr empfindlich und dürfen nur Handfest angeschraubt werden.
- Die mittelangen 3mm Schrauben.
- Die kleinen 3 mm Schrauben dienen der Montage der Messingbolzen.
- Mit den langen Schrauben werden die Motoren befestigt.
- Die 2mm Schrauben halten das Servo in Position.
- Die kleinen selbstschneidenden Schrauben dienen der Montage des Servoruderhornes an dem Ultraschallträger.
-
 Abb1: Schrauben
Abb1: Schrauben -
 Abb2: Schrauben
Abb2: Schrauben


- Bolzen
Es gibt drei längen an Bolzen.
Die 6 längsten werden auf der Bodenplatte verschraubt.
Die beiden mitleren gehören zum Ultraschallsensor und die kleinen sind Teil der Aufhängung des Liniensensors.
-
 Abb1: Bolzen
Abb1: Bolzen
- Bodenplatte
beginnen wir mit der Montage der Bodenplatte.
Dazu suchen wir 6 lange Bolzen und 6 kurze 3mm Schrauben und verschrauben alles anhand der Bilder.
-
 Abb1:Bodenplatte
Abb1:Bodenplatte -
 Abb2: Bodenplatte
Abb2: Bodenplatte -
 Abb3: Bodenplatte
Abb3: Bodenplatte



- Akkuhalter
Der Akuhalter ist ein Universalhalter, deswegen solte man die doppelteutigen Symbole aus dem Halter kratzen.
Dieses geht mit einem Schlitzchraubendreher mit einem Messer oder mit einem Bohrer.
Dabei nur Oberflächlich die + und - Symbole entfernen.
Die richtigen Symbole stehen zur Sicherheit auf der Platine.
Anschließend solten im Akkuhalter ebenfalls nur diese Symbole sichtbar sein, damit es nicht zu Verwechslungen kommt.
-
 Abb1: AlphaBot_Akkuhalter
Abb1: AlphaBot_Akkuhalter -
 Abb2: AlphaBot_Akkuhalter
Abb2: AlphaBot_Akkuhalter -
 Abb3: AlphaBot_Akkuhalter
Abb3: AlphaBot_Akkuhalter -
 Abb4: AlphaBot_Akkuhalter nach der Behandlung
Abb4: AlphaBot_Akkuhalter nach der Behandlung




- Drehzahlsensor- Gabellichtschranke
Beim Drehzahlsensor hat sich ein kleiner Produktionsfehler eingeschlichen.
dieser passt leider nicht immer in den dafür vorgesehenen Schlitz.
Dafür müssen die Ecken die noch rund sind mit einem Messer oder einer Feile Eckig gefeilt werden, bis der Sensor sauber in das Loch passt.
Dannach kann mann den Sensor mit einer 3mm Schraube 10mm lang befestigen.
Hier hat sich ein weiterer Fehler eingeschlichen.
Leider kann der Sensor nur mit der inneren Schraube befestigt werden, da bei der außeren die Muttter gegen den Motor stoßen würde.
-
 Abb1: Gabellichtschranke
Abb1: Gabellichtschranke -
 Abb2: Gabellichtschranke
Abb2: Gabellichtschranke -
 Abb3: Gabellichtschranke passt nicht in den gefrästen Schlitz
Abb3: Gabellichtschranke passt nicht in den gefrästen Schlitz -
 Abb4: Gabellichtschranke mit bereits installierten Ultraschallsensor und Infrarotsensor
Abb4: Gabellichtschranke mit bereits installierten Ultraschallsensor und Infrarotsensor




- Motoren
Nun wechseln wir zum Mainboard und Montieren wie in den Bildern und im Video gezeigt die Motoren.
-
 Abb1: Motor
Abb1: Motor -
 Abb1: Motor
Abb1: Motor -
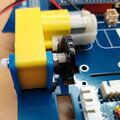 Abb1: Motor_Montage
Abb1: Motor_Montage -
 Abb2: Motor_Montage
Abb2: Motor_Montage -
 Abb3: Motor_Montage
Abb3: Motor_Montage -
 Abb4: Motor_Montage
Abb4: Motor_Montage -
 Abb5: Motor_Montage
Abb5: Motor_Montage -
 Abb6: Motor_Montage
Abb6: Motor_Montage








- Infrarotsensor
Für die Montage des Infrarot Sensores benötigen wir die schwarzen Kunststoffschrauben und Muttern.
-
 Abb1: Infrarotsensor
Abb1: Infrarotsensor -
 Abb2: Infrarotsensor
Abb2: Infrarotsensor -
 Abb3: Infrarotsensor
Abb3: Infrarotsensor -
 Abb4: Infrarotsensor
Abb4: Infrarotsensor -
 Abb5: Infrarotsensor
Abb5: Infrarotsensor



- Stecker
Die Sensoren können nun wie im Video verkabelt verkabelt werden.
AlphaBot Zusammenbau|start=2:53|end=3:40|Verkabelung
- Linesensor
Der Linsensor wird nun genauso wie im Video beschrieben montiert. Dazu werden die kleine Messing bolzen verwendet und die kleinen 3 mm Schrauben. AlphaBot Zusammenbau|start=3:40|end=4:34| Linesensor
- Ultraschallsensor
Ebenfalls kann hier der Zusammenbau wie im Video beschrieben durchgeführt werden.
AlphaBot Zusammenbau|start=4:34|end=5:43| Ultraschallsensor Das Servo Kabel solte zweimal um den Servo gewickelt werden, da es sonst zu lang ist.
-
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
Abb1: Ultraschall
-
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
Abb1: Ultraschall
-
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall -
 Abb1: Ultraschall
Abb1: Ultraschall















- Montage Arduino
Die Hochzeit zwischen Arduino und Mainboard kann anhand des Videos vollzogen werden.
AlphaBot Zusammenbau|start=7:14|end=7:28| Arduino montage
-
 Abb1:Arduino
Abb1:Arduino -
 Abb2: Arduino
Abb2: Arduino






-
 Abb1: Rad
Abb1: Rad -
 Abb1: Rad
Abb1: Rad -
 Abb1: Rad
Abb1: Rad -
Abb1: Rad



-
 Abb1: Sensorboard
Abb1: Sensorboard -
 Abb1: Sensorboard
Abb1: Sensorboard -
Abb1: Sensorboard
-
Abb1: Sensorboard
-
 Abb1: Stecker
Abb1: Stecker



{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}
Links
Line Tracking Line Tracking Beispiel
Weitere Mögliche Varianten
Hauptproblem bei der Beststellung von fertig Robotoren:
- Die meisten haben keinen Drehimpulsgeber implementiert (AlphaBot2).
Diesen könnte man durch aufkleben von Hallsensoren auf die Motoren oder an das Getriebe umgehen, bedeutet aber einen nicht unerheblichen Mehraufwand an Arbeit bei 60 Bausätzen. z.B. [3]
- Desweiteren fehlt allen ein Beschleunigungssensor/Magnetsensor /Gierrate
AlphaBot2 robot
Drehzahlsensor muss man nachrüsten Gyro fehlt, es gibt ihn mit und ohne Arduino, was den Vorteil hat, das man einen Arduino UNO R4 Plus verbauen könnte. [4] 80€ 60 ohne Arduino hat Bluetooth und iR Fernbedienung es fehlt:
- Radencoder (vorwärts und rückwärts)
- Kompass
- Gierrate
- Beschleunigungsssensoren
Smartduino
[5] 58€ hat Bluetooth und iR Fernbedienung es fehlt:
- Radencoder (vorwärts und rückwärts)kann aber hier nachgerüstet werden da gelber Motor mit durchgehender Achse(muss getestet werden)
- Kompass
- Gierrate
- Beschleunigungsssensoren
Turtle DIY Assembly Kit Smart Robot Car Kit with Tutorial for Arduino
[6] hat Bluetooth und iR Fernbedienung
es fehlt:
- Radencoder (vorwärts und rückwärts)gleicher Motor wie AlphaBot2 robot daher Sensor aufkleben Position der Reifen würde auch eine Montage eines Sensors an der außen Seite des Reifens zulassen.
- Kompass
- Gierrate
- Beschleunigungsssensoren
39$
1602 Ultrasonic Sensor RC Ultrasonic Ranging Remote Controller Smart Robot Car Kit
[7] gleich Motoren wie der AlphaBot2 robot daher nur durch Hallsensor Drehzahl dedektierbar . Drehzahlsensor muss man nachrüsten Gyro fehlt. 39$ inkl ladegerät für Akku iR Fernbedienung +LCD es fehlt:
- Radencoder (vorwärts und rückwärts)gleicher Motor wie AlphaBot2 robot daher Sensor aufkleben Position der Reifen würde auch eine Montage eines Sensors an der außen Seite des Reifens zulassen.
- Kompass
- Gierrate
- Beschleunigungsssensoren
Smart Robot Car 2WD Chassis Kit for Arduinos DIY Kit
[8] hat die gelben Motoren verbaut an dennen man ein Drehencoder nachrüsten kann, da die Welle auf beiden Seiten herausgeführt wird. Ob dieses Platzmäßig passt muss man testen. Drehzahlsensor muss man nachrüsten Gyro fehlt. 47$ iR Fernbedienung es fehlt:
- Line sensor
- Radencoder (vorwärts und rückwärts)kann aber hier nachgerüstet werden da gelber Motor mit durchgehender Achse(muss getestet werden)
- Kompass
- Gierrate
- Beschleunigungsssensoren
- Line-Sensor
- Bluetooth,
DIY L298N 2WD Ultraschall Smart Tracking Motor Roboter Auto Satz Für Arduino
[9] 18€ Es fehlt line Sensor Bluetooth, dafür Drehzahlsensor vorgesehen aber Lichtschranke anscheinend nicht dabei. Es fehlt
- Line-Sensor
- Bluetooth,
- ir Fernbedienung
- Drehencoder Drehzahlsensor vorgesehen aber Lichtschranke anscheinend nicht dabei gelber Motor.
- Kompass
- Gierrate
- Beschleunigungsssensoren
2WD-Vermeidung, die intelligentes Roboter-Fahrgestell-Auto Satz mit Geschwindigkeits-Kodierer-Ultraschall für UNO R3 aufspürt
[10] 22€ Es fehlt
- Line-Sensor
- Bluetooth,
- ir Fernbedienung
- Drehencoder Lichtschranke aber anscheinend nachrüstbar gelber Motor.
- Kompass
- Gierrate
- Beschleunigungsssensoren
Ladegeräte
KeepPower C2 Ladegerät für Lithium-Ionen-Akkus
- 14500 / 14650 / 16340 / 18350 / 14650 / 16650 / 17500 / 17670 / 18500 / 18650 / 20700 / 21700 / 22500 / 26500 / 26650 / 32650 3,6V und 3,7V Li-Ionen Akkus
- 1A pro Ladeport
Nitecore UM2
- Li-Ion/LiFePO4: 10440, 14500, 14650, 16500, 16340(RCR123), 16650, 17350, 17500, 17650, 17670, 17700, 18350, 18490, 18500, 18650, 18700, 20700, 21700, 22500, 25500, 26500, 26650, 26700 Ladeschacht Länge 77mm.
- 0,1-1,5A pro Schacht
- Eigenständiges erkennen des Akkutyps (Li-Ion, Ni-MH oder Ni-Cd) LiFePo4 manuell zuschaltbar
- benötigt USB Port zum Laden --
Nitecore NEW i2
- Li-Ion, LiFePo4 IFR:10340, 10350, 10440, 10500, 12340, 12500, 12650, 13450, 13500, 13650, 14350, 14430, 14500, 14650, 16500, 16340(RCR123), 16650, 17350, 17500, 17650, 17670, 18350, 18490, 18500,18650, 18700, 20700 (ungeschützte), 21700 (ungeschützte), 22500, 22650, 25500, 26500, 26650 (max. Länge 71mm)
- Ni-MH/Ni-CD: AA, AAA, A, SC, C
- max 1A pro Schacht
- laden von 12 V oder aus dem Netz
Nitecore Sysmax NEW i4
- Li-Ion, LiFePo4 IFR:10340, 10350, 10440, 10500, 12340, 12500, 12650, 13450, 13500, 13650, 14350, 14430, 14500, 14650, 16500, 16340(RCR123), 16650, 17350, 17500, 17650, 17670, 18350, 18490, 18500,18650, 18700, 20700, 21700, 22500, 22650, 25500, 26500, 26650
- Ni-MH/Ni-CD: AA, AAA, A, SC, C
- 1,5A / benutzte Schächte
- laden von 12 V oder aus dem Netz
AKKU
18650 Li Ionen ohne Schutzschaltung
Panasonic
Links
Videos
Anleitungen
Bausätze
- DIY L298N 2WD Ultraschall Smart Tracking Motor Roboter Auto Satz Für Arduino
- LAFVIN Smart Robot Car Kit Turtle
- 1Set 2WD Mini Runde Doppel-Deck Smart Roboter Auto Chassis DIY Kit für Arduino
- AlphaBot2 robot building kit for Arduino
- Intelligente Auto-Lernsuite Robot
Sensoren
- [ Gyro]